- The paper introduces a set-based value function method that solves Bellman-type functional equations for DOS estimation under input constraints.
- It leverages physics-informed neural networks to approximate the rescaled value function, yielding less conservative stability region estimates.
- Numerical results show robust convergence with enhanced stabilization domains compared to classical quadratic Lyapunov approaches.
Set-Based Value Function Characterization and Neural Approximation of Stabilization Domains for Input-Constrained Discrete-Time Systems
Introduction and Problem Statement
This work addresses the fundamental problem of estimating the Domain of Stabilization (DOS) and synthesizing stabilizing controllers for input-constrained, discrete-time, nonlinear systems. The DOS is defined as the set of all initial conditions that can be asymptotically driven to a prescribed controlled invariant set (CIS) under admissible input policies. While various classical and modern techniques—for example, Lyapunov-based methods, model predictive control, and recent neural approaches—offer practical tools for control synthesis, they often yield conservative DOS estimates. This conservatism is particularly acute under input constraints and in highly nonlinear settings, where standard Lyapunov or reachability approaches may substantially underestimate the true region of attraction.
The paper presents a set-based value function framework to characterize DOS, leveraging value functions defined on metric spaces of compact sets. Unlike classical approaches that operate on individual state trajectories, this method encapsulates the behavior of sets of states, enabling a direct connection between reachable set iteration and stabilization properties. The key innovation is the establishment of value functions that solve Bellman-type (Zubov-type) functional equations, devoid of explicit infimum operators, thus facilitating efficient computation and integration into neural architectures.
Theoretical Foundations: Set-Based Value Functions
Let xk+1=f(xk,uk) describe the system dynamics with uk∈U, a compact input constraint set. The main objects of study are set-based value functions V,W:K(Rn)→R+∪{∞}, defined in terms of the minimal cost accumulated along reachable sets under all admissible input sequences.
Specifically,
V(X)=k=0∑∞Ψ(R(X,k)),
with Ψ(X)=infy∈Xα(y) for a suitable continuous, positive definite function α, and R(X,k) denoting the k-step reachable set from X. The function W(X)=1−exp(−V(X)) offers a rescaled version, which aligns conveniently with sublevel set characterization.
A central result is that the true DOS w.r.t. a CIS uk∈U0 coincides with the set uk∈U1. These value functions satisfy precise Bellman-type functional equations:
uk∈U2
where uk∈U3 is the reachable image for all possible inputs, with analogous results for uk∈U4. Importantly, these functional equations are shown to be uniquely solvable over the relevant function class under natural stabilizability assumptions, and the functions inherit continuity and monotonicity properties with respect to the Hausdorff topology.
The characterization leads to sublevel set formulations for the DOS, which are theoretically tight in the absence of over-approximation and can be directly employed for controller synthesis under suitable conditions—namely, when control Lyapunov function criteria are met.
The practical computation of the value functions, even in finite-horizon approximations, is inhibited by the curse of dimensionality inherent in reachable set enumeration. The authors employ trajectory-based and set-based sampling to approximate reachable sets, using a large ensemble of input signals to populate uk∈U5.
To leverage the theoretical structure, a neural network (NN) regression model is trained to approximate uk∈U6. Training is performed via a composite loss function that includes a data-driven term (minimizing the discrepancy to the sampled, truncated value function targets) and a physics-informed term that penalizes the residual of the Bellman-type equation. Critically, the set-valued argument uk∈U7—a challenging aspect for standard architectures—is embedded through a finite-dimensional representation of hyperrectangles (or other template sets), achieved by a mapping uk∈U8 that is injective on the collection of all sets appearing during training.
This hybrid "physics-informed" training regimen enforces structural consistency of the neural value function with the underlying stabilization equation, facilitating both accurate DOS estimation and controller synthesis from the learned Lyapunov-like function.
Numerical Results
Extensive experiments on two benchmark nonlinear systems—a 2D cubic-in-the-state system and a 3D extension—demonstrate the capabilities of the proposed set-based, physics-informed NN framework.
The methodology is as follows:
- Initial Lyapunov Region: Compute a quadratic Lyapunov function estimate (ellipsoidal region) for local stabilization using a linear feedback controller.
- Grid Enlargement: Broaden the region by grid search to obtain the largest ellipsoidal set for which control decrease conditions can be met.
- NN Training: Train the NN value function via the set-based, physics-informed loss on the full domain uk∈U9.
- Domain Extraction and Control Synthesis: Extract the neural estimate of the DOS and construct a hybrid policy that transitions from the local linear controller to a set-search-based policy, ensuring strict decrease of the neural value function.
The resulting neural estimate V,W:K(Rn)→R+∪{∞}0 consistently encloses a substantially larger region than the classical quadratic Lyapunov region, closely approximating the true DOS. Closed-loop trajectories initialized in V,W:K(Rn)→R+∪{∞}1 converge efficiently to the target, and input constraints are strictly enforced by the policy synthesis procedure.
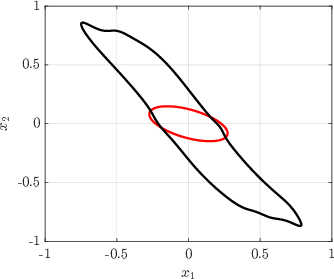
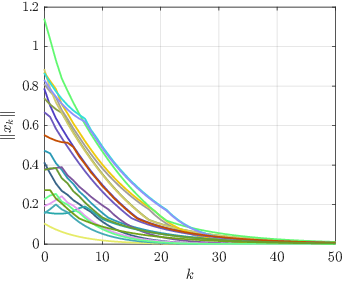
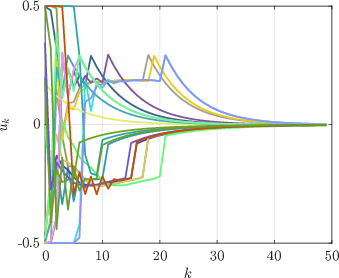
Figure 1: Estimated domains of stabilization (left), where the NN-based estimate is shown in black and the ellipsoidal estimate in red; norm profiles of the corresponding closed-loop trajectories initialized in V,W:K(Rn)→R+∪{∞}2 for the 2D system (middle); and the control profiles (right).
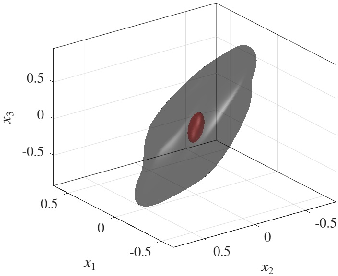
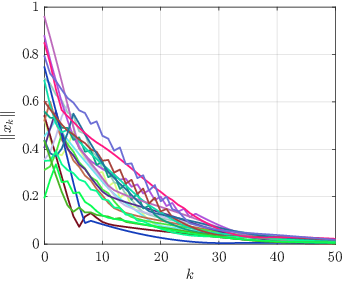
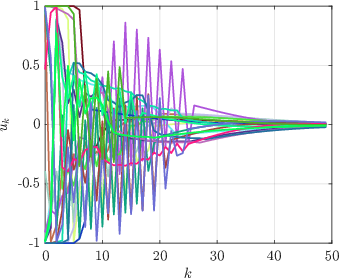
Figure 2: Estimated domains of stabilization (left), where the NN-based estimate is shown in black and the ellipsoidal estimate in red; norm profiles and control signals for the 3D system.
The numerical results substantiate the significant improvement in DOS estimation achievable by the physics-informed NN approach relative to quadratic Lyapunov analysis. For both case studies, the trained network provides a value function whose V,W:K(Rn)→R+∪{∞}3-sublevel set almost coincides with the empirical region from which stabilization is successful under input constraints. The feedback policy constructed via the learned function enables robust stabilization for all admissible initial states within this region.
Implications and Future Directions
The integration of set-based Bellman functional analysis with physics-informed NN regression enables both accurate DOS estimation and direct control synthesis in settings where traditional tools are fundamentally limited by computational complexity or intrinsic conservatism. Key advantages include:
- Avoidance of explicit Bellman infimum computations during training via set-based structure.
- Tight sublevel set characterization, yielding non-conservative stability region estimates.
- Compatibility with input and state constraints.
- Ability to harness recent advances in neural verification and reachability computation for formal guarantees.
The paper proposes several future directions. Notably, the certification of learned value functions via neural verification frameworks (e.g., V,W:K(Rn)→R+∪{∞}4-CROWN, SMT solvers such as dReal) is a promising avenue to provide rigorous correctness guarantees for closed-loop safety and stability. Additionally, extensions to systems subject to state constraints, disturbance inputs, and uncertain dynamics are feasible within the proposed set-based framework. Further research may seek to generalize the sufficient CLF conditions and develop scalable training and verification protocols for high-dimensional systems.
Conclusion
This paper presents a rigorous framework combining set-based value function analysis and physics-informed neural approximation for precise estimation and control synthesis of DOS in input-constrained, discrete-time, nonlinear systems (2604.00305). Theoretical guarantees are established for the value function properties and their equivalence to DOS sublevel sets, and the neural learning protocol is shown to yield robust, less conservative stabilization domains in practical scenarios. This methodology provides a strong foundation for further research in verified learning-based control for nonlinear systems with hard constraints.