- The paper demonstrates that conventional channel models inadequately capture UAV-specific A2A fading due to platform shadowing and antenna directivity.
- It employs a custom SDR-based channel sounder with high-resolution trajectory tracking to quantify multipath effects and RMS delay spreads of 1.4–2.4 ns.
- Findings underscore the need for trajectory-aware modeling and dynamic beamsteering to enhance reliability in next-generation UAV networks.
Air-to-Air Channel Characterization for UAV Communications at 3.4 GHz
Introduction
The characterization of Air-to-Air (A2A) channels for UAV communications in the sub-6 GHz spectrum is essential for the design of robust aerial ad hoc and integrated wireless networks. Prior work in this domain has largely been constrained by static, oversimplified models adapted from terrestrial or Air-to-Ground (A2G) studies, resulting in insufficient accuracy for the unique dynamics of airborne platforms. This paper provides a statistically grounded empirical analysis of the 3.4 GHz A2A channel, leveraging a custom lightweight open-source channel sounder architecture, USRP B210 SDRs, and centimeter-level GNSS-DO synchronization, deployed onboard two UAVs in a rural UAV testbed.
Measurement System Architecture and Experiment Design
A modular, deployable SDR-based channel sounder was engineered to support reconfigurable signaling and high-fidelity synchronization under UAV payload constraints. This system, diagrammed in (Figure 1), incorporates GNSS-disciplined oscillators for phase coherence, real-time RTK corrections, and integrated software interfaces for flight path and data capture coordination.
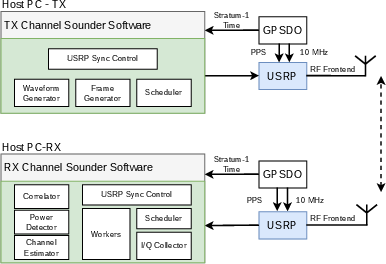
Figure 1: Channel sounder block diagram showing SDRs, GNSS-DO for synchronization, and interconnections on UAV platform.
Deployment utilized two LAM-class UAVs, each outfitted with portable radio/antennas nodes (Figure 2), with the receiver executing a parametrically-defined spherical trajectory in excess of 8 turns and altitudes spanning 45 to 85 m to thoroughly interrogate the A2A link geometry (Figure 3). Antenna patterns and platform fuselage effects were pre-characterized to decouple them in subsequent analysis steps. Precise path and attitude control employed nonlinear model-based trajectory following for dynamic accuracy with minimal positional error.
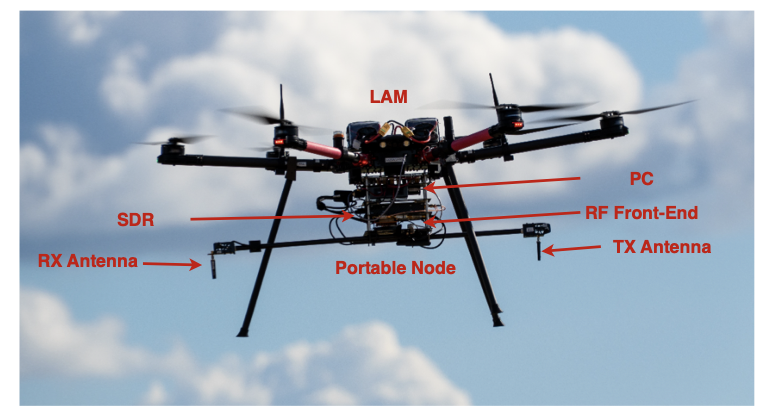
Figure 2: LAM platform with channel sounder payload during deployment for measurement.

Figure 4: In-flight configuration with both UAVs carrying portable nodes.

Figure 3: 3D view of the receiver's spherical trajectory around the transmitter.
Data Collection Methodology
The probe signal consists of a root-89 Zadoff-Chu sequence (length 2048, repeated 4x), supporting efficient correlation while providing spectral flatness and resilience to PAPR. All acquisitions sampled at 56 MHz and a rate of 10 Hz, yielding high-density spatial resolution. To accurately extract the CIR and quantify multipath phenomena, USRPs were power-calibrated and antenna directivity/imported gain profiles applied.
Flight control ensured the Rx UAV always oriented its boresight at the fixed Tx UAV, maximizing SNR and controlling for orientation-based gain effects, while the transmitter maintained a fixed bearing. This provided a comprehensive, systematic sweep of all relevant 3D link angles.
Analysis: Fading, Path Loss, and Multipath
Significant elevation and heading dependence in large-scale fading is observed, with consistent decreases in received power at some headings/altitudes due to directivity nulls, antenna orientation, and fuselage shadowing, validated against baseline antenna patterns (Figure 5, Figure 6).
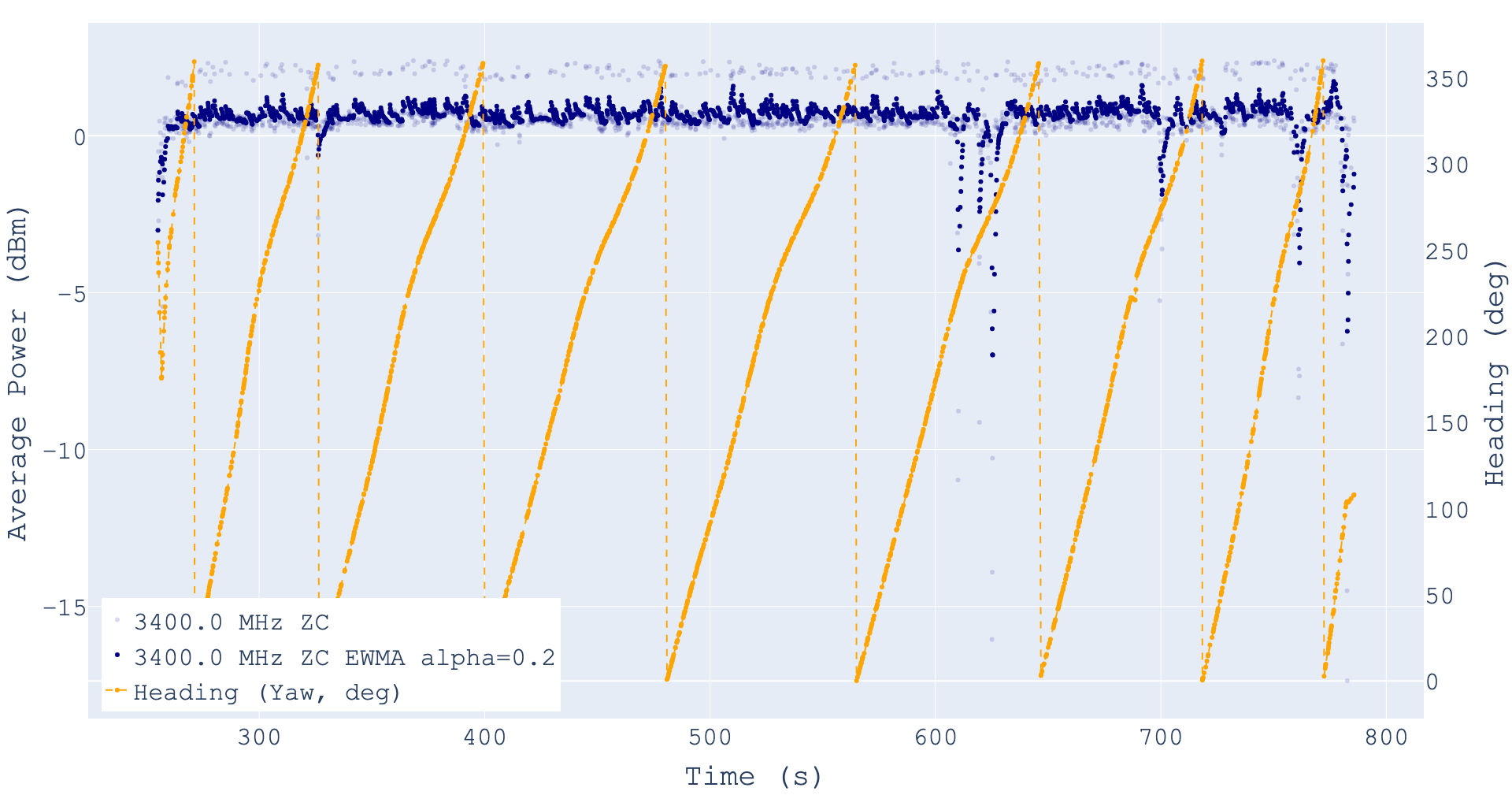
Figure 5: Average received power versus altitude and heading, displaying directional fading and UAV structure-induced nulls.
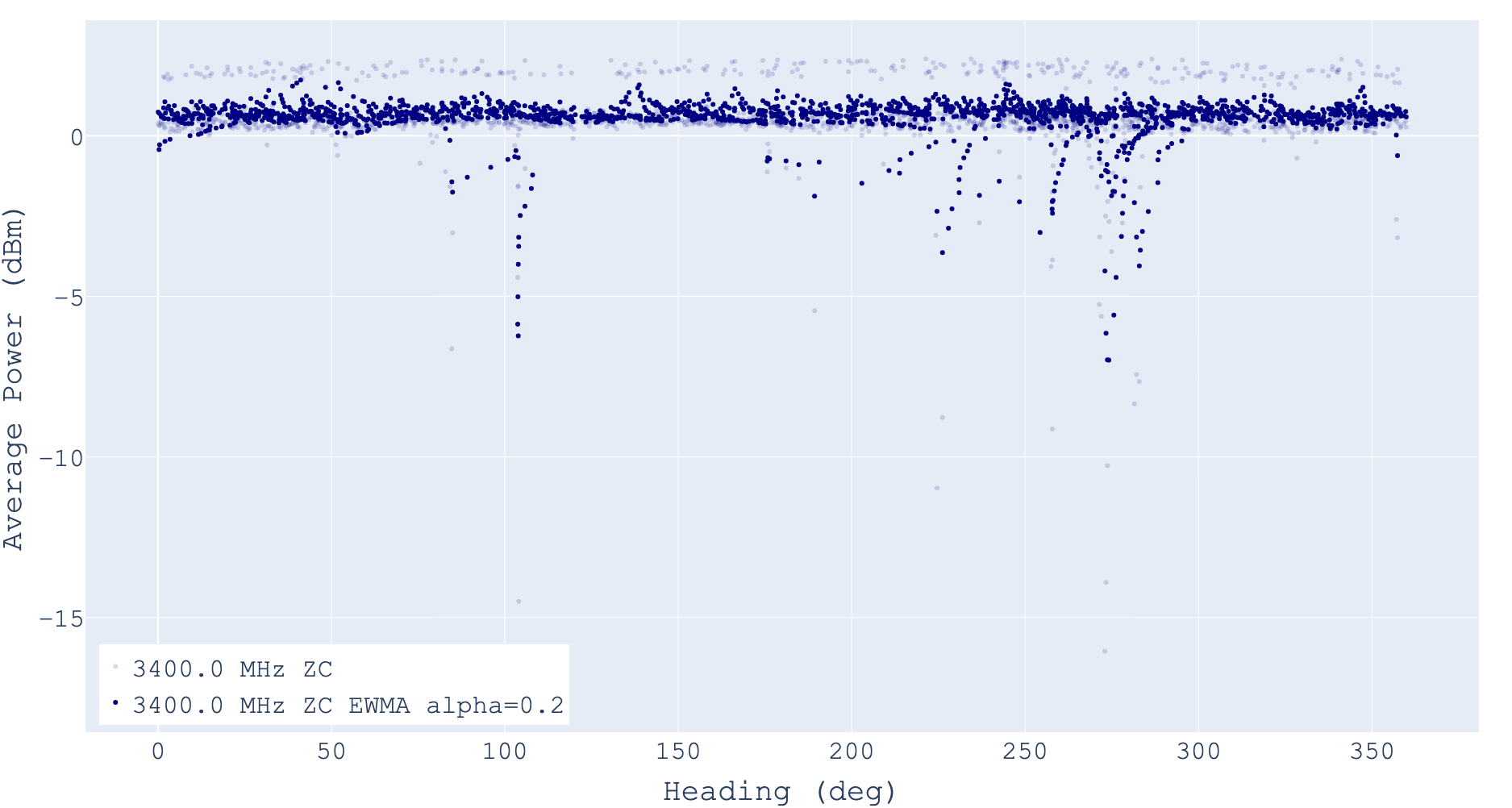
Figure 6: Received power variations tied to specific heading angles of the mobile UAV.
Severe power drops at certain configurations underscore the necessity of incorporating platform/antenna interaction models into A2A system-level planning.
The continuous 3D spatial mapping of received power underscores sharp gradients and local maxima/minima—consistent with transient LOS obstructions and antenna pattern effects—that cannot be predicted by free-space or simple path loss models, as shown in (Figure 7) and (Figure 8).

Figure 7: 3D spatial mapping of received power over the flight trajectory.
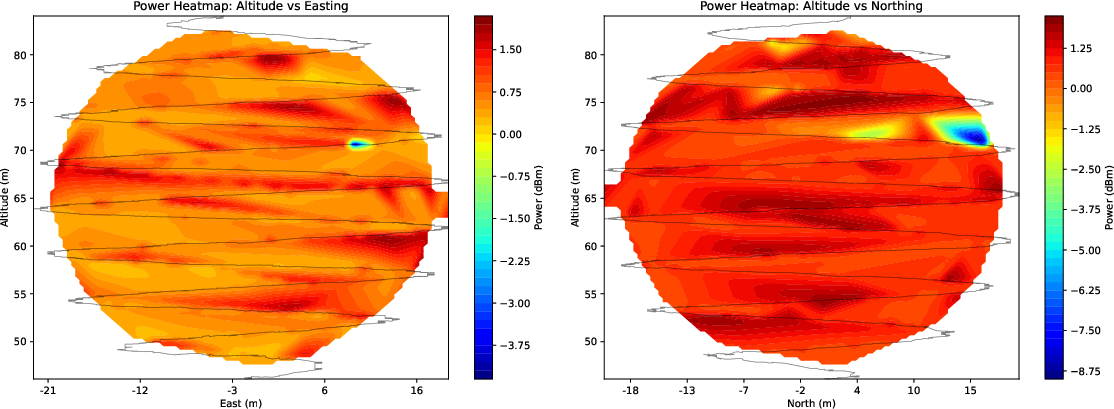
Figure 8: Altitude-sliced heatmaps detailing received power related to east/north UAV coordinates.
RMS delay spread, derived from CIRs, is modest (1.4–2.4 ns) but non-negligible even in loS-dominant scenarios, attributable to ground and building reflections. Its CDF evinces weak altitude-dependent divergence (Figure 9).
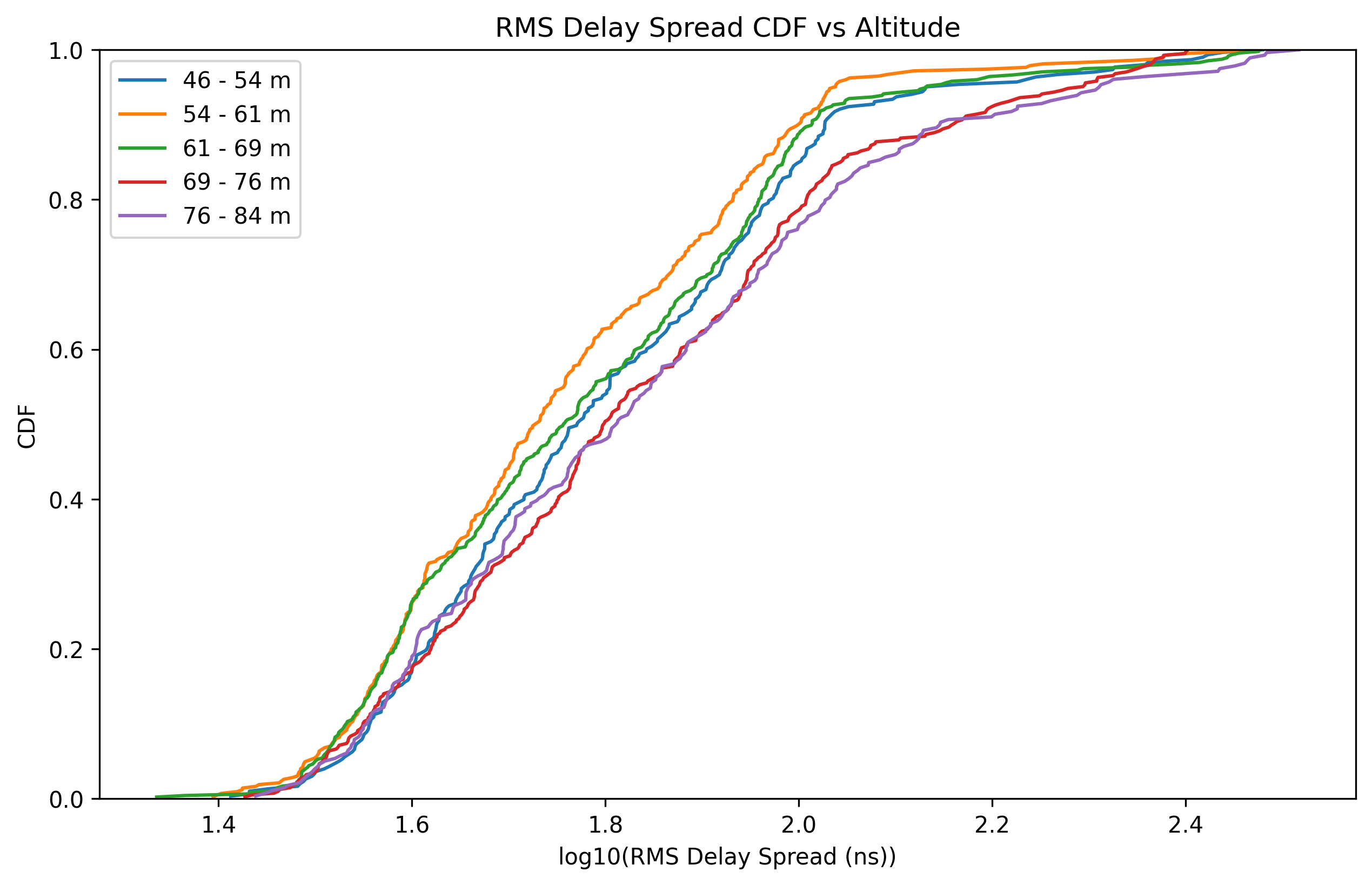
Figure 9: CDFs of RMS delay spread for different flight altitudes, demonstrating the environmental contribution to multipath.
Multipath analysis of measured CIRs (Figure 10) confirms that while the direct path dominates, secondary components—chiefly from ground and local objects—can be temporally resolved and must be accounted for in the link design. The data evidence long-range specular reflection contributions from infrastructure.
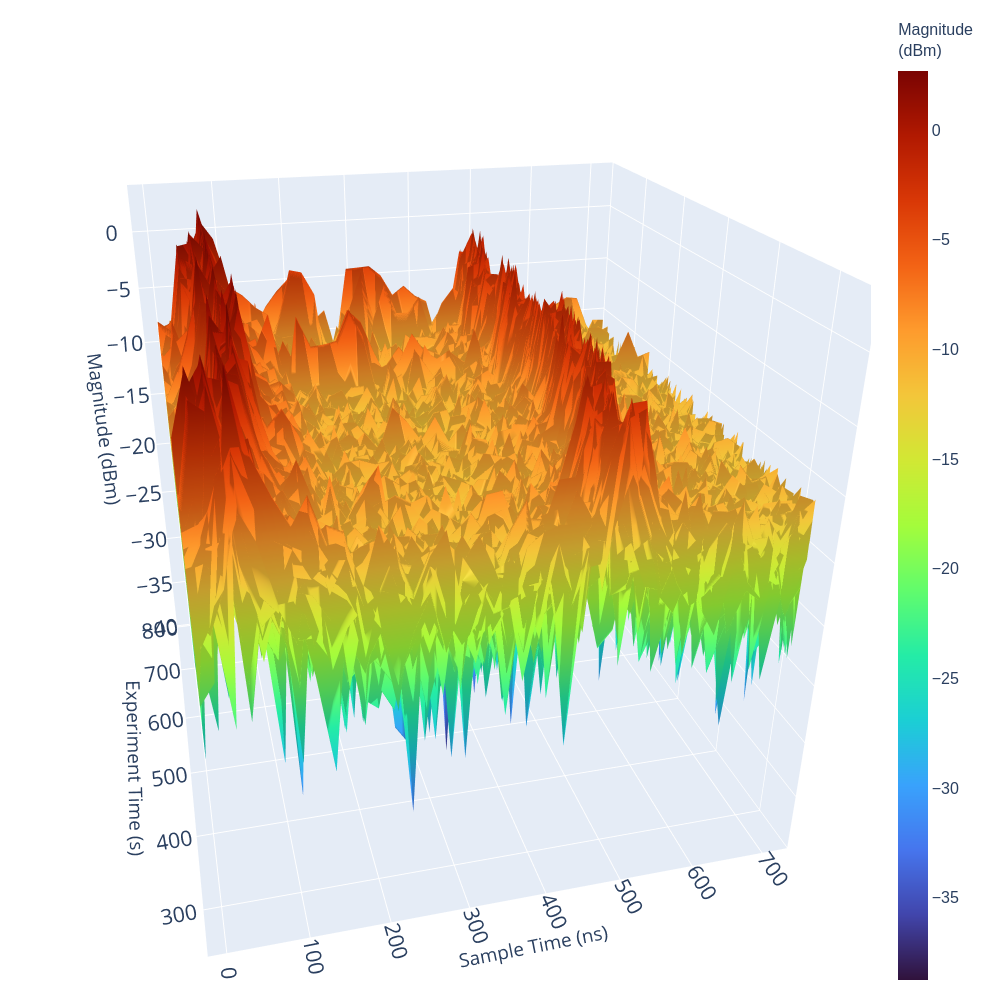
Figure 10: Channel impulse response profile during a flight segment, highlighting distinguishable multipath components.
Implications and Future Research Directions
This empirical dataset reveals that for A2A links at 3.4 GHz, the combined impacts of platform shadowing, complex antenna gain modulation, and environmental multipath are critical—even in rural airspace with nominal flat terrain. This challenges existing stochastic/freespace models, indicating that high-fidelity system-level simulation requires explicit integration of UAV geometry, orientation-dependent gain, and trajectory-aware environmental reflections.
In the context of NextG and 6G aerial networking, these findings carry substantial weight for physical/MAC protocol design, UAV swarm coordination, and for validating channel emulators and digital twins. The existence of spatially and temporally variant deep fades emphasizes the need for robust diversity, dynamic beamsteering, or coordinated trajectory planning in real-time cooperative aerial applications.
The open-source release of the dataset, along with the modular channel sounder platform, will encourage repeatable experiments and further comparative studies in urban or obstructed environments. Future investigations should extend to modeling polarization, Doppler spectra induced by aggressive maneuvers, and cross-validate with ray-tracing or electromagnetic solvers. Integration with drone-specific airframe datasets and multi-frequency campaigns will enable generalized geometry-based stochastic models tailored for A2A contexts.
Conclusion
Comprehensive measurement and analysis of the 3.4 GHz A2A channel for UAV communication demonstrates the inadequacy of traditional static or oversimplified models in capturing the nuanced effects of antenna directivity, fuselage shadowing, and environment-induced multipath. These findings underline the necessity of incorporating high-fidelity empirical data for protocol development and realistic emulation of aerial networks, especially as UAVs become central to future wireless connectivity infrastructures.