- The paper demonstrates a novel electroadhesive clutch design that actively modulates elastomer strain, enabling programmable shape morphing and rapid force application.
- It integrates analytical models, FEA, and active-learning-driven neural operators to optimize actuator performance with high accuracy (mean RMSE ~4%).
- The study outlines practical limitations in sim-to-real transfer while laying the groundwork for scalable, human-assistive soft robotics.
Elastomeric Strain Limitation for Design of Soft Pneumatic Actuators: A Comprehensive Technical Analysis
Introduction and Motivation
The paper "Elastomeric Strain Limitation for Design of Soft Pneumatic Actuators" (2604.02609) presents a systematic investigation into strain-limited soft pneumatic actuators (SPA) for safe and adaptive robotic force interaction, particularly in human-assistive applications. Recognizing the dual requirements of compliance and force capacity in SPA—for both safety and efficacy in tasks like patient handling—the author addresses the critical gap in trajectory control via membrane mechanical design and advances real-time stiffness modulation through active and passive strain limiters.
Electroadhesive Clutch-Enabled Stiffness Modulation
A substantive portion of the work is dedicated to the development, modeling, and experimental validation of electroadhesive (EA) clutch-based strain limiters. By integrating EA clutches onto concentrically strain-limited elastomer membranes, the SPA achieves dynamic modification of deformation trajectories under identical pressure sweeps. The system is capable of rapid, electrically driven transitions between discrete mechanical states, providing programmable shape morphing and fast force application.
Different clutch activation patterns facilitate multiple target shapes during inflation—with strong agreement between FEA predictions and physical measurements (RMSE < 7–13% of max height). Force characterization demonstrates workspace manipulation (6–12 mm ball displacement at actuator edge) and rapid directional force release (up to 3.2 N on a 3.7 g ball), as well as the ability to perform both light and heavier object manipulation, such as tilting an 820 g textbook by 5° (Figure 1 and Figure 2).
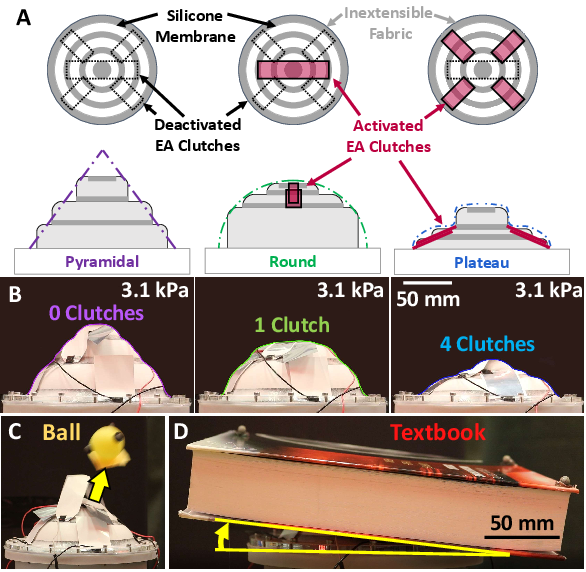
Figure 1: A: Membrane inflation into various shapes via programmable clutch activation B: Expansion profiles at fixed pressure with distinct clutch states C–D: Demonstration of manipulation tasks on light and heavy loads.
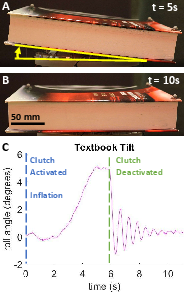
Figure 2: Characterization of Mode 2 manipulation: controlled tilting and rapid repositioning of a loaded object under varying clutch actuation.
The limitations identified include clutch force slipping due to fabrication imprecision and geometric mismatch, particularly for complex shape transitions under external load.
Advanced Sheathed Clutch Architectures
To address robustness and integrate continuous variability, the paper introduces a silicone-sheathed clutch architecture capable of providing analog modulation of antagonistic force through pulse-width modulated (PWM) control over high voltage actuation (Figure 3 and Figure 4). The antagonistic clutch provides position locking and variable friction, described analytically via a friction-controlled model derived from electrostatics and elastomer hyperelasticity:
- Clutch holding force: Fclutch=2μϵ0A(dϵrV)2, with variable ζ representing the PWM-controlled proportion of on-state force,
- Sheath force computed from Gent model parameters, uniaxial stretch, and cross-sectional geometry,
- Superposition yields the total antagonistic force, enabling precise position control under pneumatic inflation.
Experiments on dynamic energy dissipation validate the force and catch energy dissipation model. Variable strain limitation is demonstrated in a cylindrical inverse PAM (IPAM)—PWM clutch activation transitions the SPA endpoint position and bending angle in a graded, repeatable manner for fixed pressure input (Figure 5).
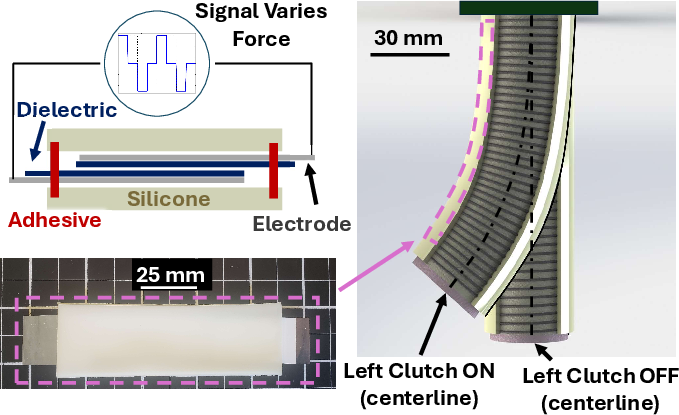
Figure 3: Left—Silicone-sheathed clutch system; Right—integration into a soft actuator for dynamic position control.
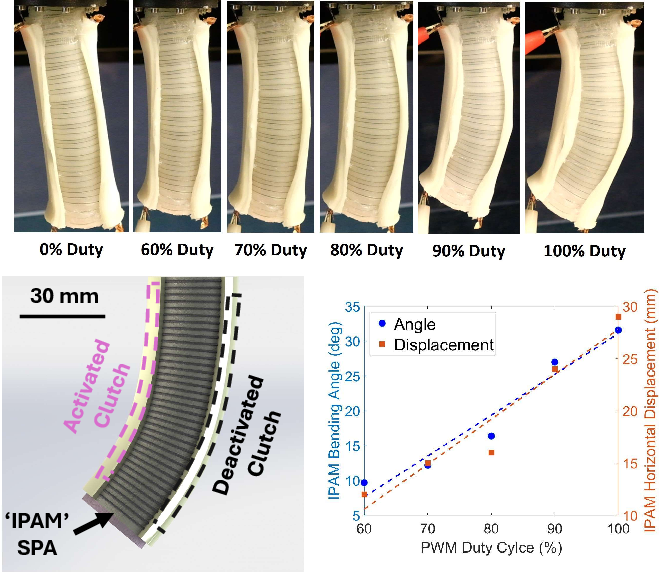
Figure 5: SPA endpoint angular displacement and lateral position as a function of clutch PWM-induced force limitation at constant pressure.
Data-Driven Modeling and Inverse Design via Active Learning
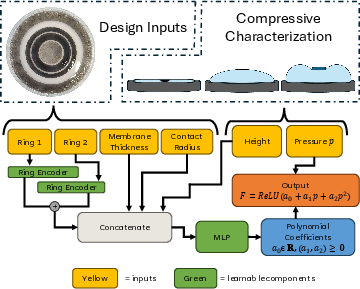
A defining contribution is the active-learning-driven exploration and modeling of a high-dimensional design space for axisymmetric SPA. The approach moves beyond physics-based solely analytical or FEA models by constructing a lightweight neural operator model, trained with efficiency via active learning over an experimental dataset covering varied membrane thicknesses, ring geometries, and contact radii.
Practical validation is realized through inverse design for targeted mass-lift trajectories. The learned model enables design optimization for user-specified pressure-force-height waypoints—demonstrating low trajectory tracking error (0.02–0.04 scaled RMSE) both for interpolated designs and out-of-distribution membrane configurations (Figure 7).
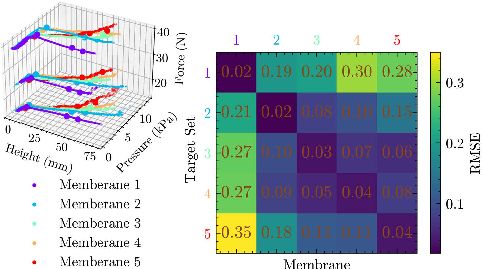
Figure 7: Left—lift trajectories for different membranes and masses; Right—RMSE for experimental trajectories versus target waypoints, highlighting design specificity.
Ablation Studies and System Integration
The robustness and limitations of the modeling framework are evaluated through perturbation and ablation experiments: varying contact strain limitation, lubrication, and contact plate geometry. Results reveal that modeling accuracy and output trajectories are sensitive to deviations in real-world constraints such as contact area, boundary pinching, and surface sliding—all of which have critical relevance for deployment in uncontrolled settings.
Application to parallel actuators lifting a mannequin leg segment demonstrates multiactuator trajectory prediction enabled by co-design within the operator framework, but with model errors rising to 2–4x the single-membrane value due to non-modeled system interactions (Figure 8, Figure 9).
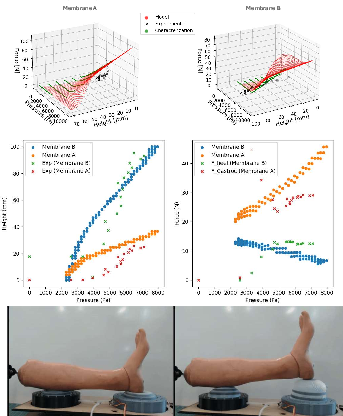
Figure 8: Leg lift experiment with two optimized SPA membranes, reporting modeled, characterized, and experimental trajectories; right—membrane states before and after inflation.
Implications, Limitations, and Future Directions
This work makes several significant assertions:
- Active strain-limiting via EA clutches can reconfigure the spatial and force trajectories of SPAs in real-time using single-pressure inputs.
- Data-driven learning, especially when guided by epistemic uncertainty through active learning, can deliver superior force prediction and design optimization across high-dimensional strain-limited membrane SPA morphology, relative to physics-only methods.
- Despite robust modeling within controlled laboratory boundaries, the sim-to-real gap remains non-trivial due to uncontrolled variations in contact area, friction, and multibody mechanical interactions in practical environments.
From a theoretical standpoint, these results expand the methodology for generative soft actuator design, laying the groundwork for modular or highly customized human-assistive robotic platforms that operate under minimal sensing and control.
Practically, this indicates promise for scalable, low-cost, human-interacting robots, where the compliance, force capacity, and trajectory can be engineered into the membrane morphology and reconfigured electronically.
Open challenges and future work include:
- Extending multi-membrane system modeling to capture multiple equilibria and interactive system dynamics.
- Development of multi-fidelity models leveraging both simulation and experimental data for further reduction in training cost and epistemic uncertainty.
- Integration of real-time shape/contact sensing and closed-loop control for robust operation outside laboratory settings.
- Advancing EA clutch technology for higher reliability and integration with stiffer materials and in-body strain paths.
Conclusion
This paper presents an integrated exploration of strain-limiting architectures, active and passive, for soft pneumatic actuators—combining materials innovation, electroadhesive clutch control, and active-learning-based empirical modeling. The technical framework enables real-time reconfigurability and performant, design-optimized SPA response for large-force, human-safe applications, while also outlining the present boundaries in real-world deployment due to environmental complexity and system integration. The contribution covers both rigorous mechanistic insight and practical pipelines for empirical model-based inverse design in soft robotics.