- The paper presents a novel method for decoupling and learning UAV antenna radiation patterns using spherical harmonics from in-field flight data.
- It details a calibration trajectory that achieves full 360° orientation sampling, ensuring robust, data-driven communication modeling.
- Experimental results reveal up to 10 dB signal strength variations, validating the approach for practical modular UAV deployments.
Learning In-Flight UAV Radiation Patterns for Enhanced Communication Modeling
Introduction
Accurate modeling of radiation patterns (RPs) for antennas mounted on multi-rotor UAVs is foundational for reliable communication-aware robotics. The paper "Orientation Matters: Learning Radiation Patterns of Multi-Rotor UAVs In-Flight to Enhance Communication Availability Modeling" (2604.02827) presents a methodology for learning, in situ, the RPs of modular UAV systems using actual flight data. By targeting a decoupled identification of both transmitting and receiving UAV antenna patterns, and leveraging spherical harmonics representations, the work advances field-ready, data-driven models suitable for real-time autonomous operation, especially after system modifications such as payload changes.
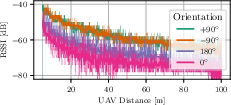

Figure 1: Illustration of the experimental setup, highlighting how relative antenna orientation yields significant signal strength variation (up to 10 dB) even when both antennas are nominally parallel to the ground.
Motivation and Background
Classical channel modeling techniques—whether based on electromagnetic solvers or ray tracing—typically require detailed a priori knowledge of the environment and platform geometry, making them impractical for modular UAVs in field deployments. In swarming and communication-aware robotics, configuration changes (frame adjustments, payload swaps, antenna re-orientations) can cause substantial, direction-dependent attenuation, which, if left unmodeled, undermines path planning and connectivity maintenance.
Previous research often assumes pre-identified or theoretical RPs; work such as Matson et al. (2021) identified the impact of antenna orientation experimentally but did so for fixed configurations and using single-UAV sampling. The present contribution aims to bridge this gap by providing a method to rapidly recalibrate both vehicles' RPs in the field and under realistic flight constraints.
Problem Definition
The central challenge is to identify, from calibration flight data, the decoupled RPs Gtx and Grx for a pair of heterogeneous, non-holonomic UAVs. The challenge is compounded by the mutual, direction-dependent effect of both frames/antennas on measured channel gain and the need for a method robust to environmental and hardware noise:
Methodology
Calibration Trajectory
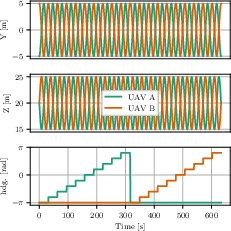
Both UAVs initiate flight at a standard distance and altitude, executing synchronized vertical circles and discretely varying heading to uniformly sample all 360∘ orientations, facilitating full domain coverage for RP learning.
Pose and Signal Data Acquisition
High-fidelity global pose estimation employs GNSS, IMU, and barometry, with time synchronization achieved using chrony-based NTP. Signal measurements utilize an off-the-shelf 2.4 GHz Wi-Fi radio in monitor mode, enabling high-rate RSSI collection.
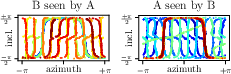
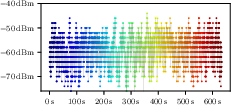
Figure 2: Representative dataset visualization—azimuth-inclination space coverage (top), matched in time against raw RSSI measurements (bottom), exemplifying the dense sampling achieved during a calibration flight.
- Spherical Harmonics (SH): RPs are modeled as scalar functions on the sphere, expanded in orthogonal SH basis functions up to a tunable order. This approach naturally accommodates the 3D, periodic nature of the problem and enables efficient regularization.
- Bucketized (Grid-based) Model: The domain is covered by a set of kernelized points, with attenuation at each grid point acting as an independent regression weight, providing increased locality sensitivity at the expense of parameter count.
- Polynomial Regression: Multivariate polynomials in azimuth and inclination serve as a baseline, although their lack of periodicity limits representational fidelity.
The learning process involves linear residual minimization with ridge regularization, enforcing solution uniqueness in the presence of identification ambiguities.
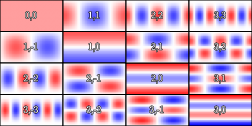

Figure 5: Illustration of the spherical harmonics basis functions used in RP modeling, capturing both azimuthal and polar variation.
Experimental Evaluation
Experiments were conducted outdoors with two heterogeneous UAVs (DJI F450 and Holybro X500 V2), each equipped with adjustable antenna orientations and diverse payloads (UVDAR, LiDAR). Over 27,000 timestamped pose/RSSI samples were collected in a single flight, with detailed synchronization ensuring accurate alignment of signal and geometric data.
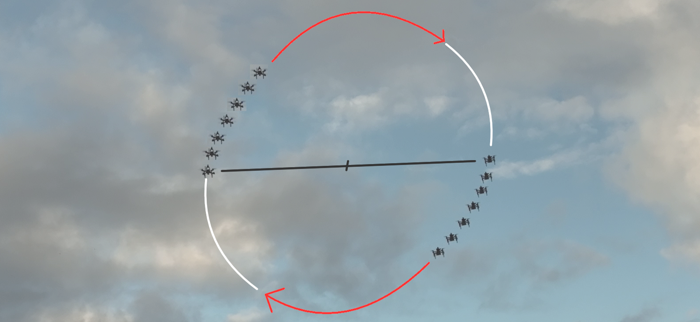


Figure 6: Experimental UAV platforms, highlighting antenna orientations and payload diversity.
Results
- Model Performance: The SH model of order 14 (196 parameters) achieves an RMSE of 3.73 dB, nearly matching both the empirical measurement noise and the unconstrained nearest-neighbor baseline. Increasing SH order to 28 shows minimal evidence of overfitting (as assessed by cross-validation topology preservation and AIC scores), indicating that very fine angular resolution is, in this context, learnable from a single dense flight.
- Radiation Pattern Recovery: Learnt patterns clearly reveal non-trivial, direction-dependent attenuation—up to 10 dB difference on principal cuts—validating the necessity of per-platform, per-configuration RP recovery.
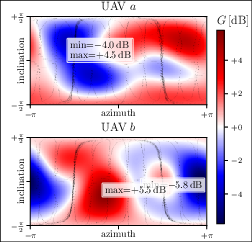
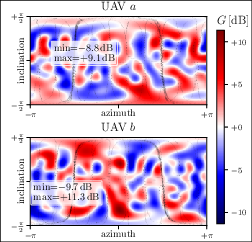
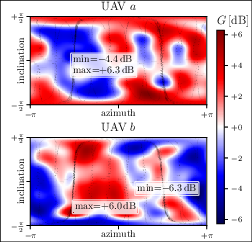
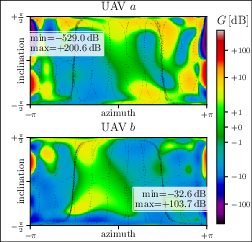
Figure 4: Selection of learnt radiation patterns (SH, Bucketized, Polynomial) for both UAVs, visualized over the azimuth-inclination domain.
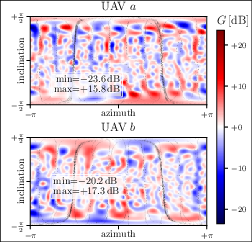
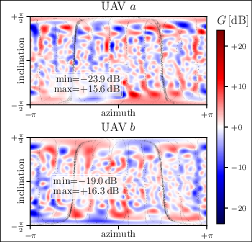
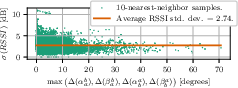
Figure 7: SH model radiation patterns (order 28) for two cross-validation splits—note topology stability across splits, supportive of robust pattern learning.
Statistical analysis of local RSSI sample variance confirms that the achievable prediction accuracy is fundamentally bounded by physical noise sources (propeller interference, polarization mismatches), and that the chosen method operates near this bound.
Implications and Future Outlook
The demonstrated methodology provides a practical solution for rapid, in-field RP identification in modular UAV systems, removing the need for lab-based, one-off calibrations and accommodating frequent system changes. The theoretical contribution lies in the successful decoupling of joint channel gain into independent, platform-specific models under real flight constraints—a critical advance for communication-aware path planning, real-time network optimization, and swarm management.
Practically, once incorporated into autonomy stacks, these models will enable UAVs to dynamically replan missions in response to configuration changes, maximize throughput by preferential antenna alignment, and minimize cross-link interference in communication-constrained swarms.
Future work should explore:
- Extending to polarization-aware and phased antenna arrays
- Generalizing across multiple frequency bands
- Automatic trajectory optimization for information-efficient RP learning
- Integration with uncertainty quantification frameworks (e.g., Gaussian processes)
- Laboratory validation with ground-truth measurements and richer sensor suites
- Robustness under more severe environmental multipath and interference conditions
Conclusion
This study establishes a data-driven, in-flight approach for the decoupled learning of UAV system radiation patterns using spherical harmonics, achieving prediction errors at the measurement noise limit. The method supports practical, modular UAV deployment scenarios where setup changes are routine, filling a key gap in existing communication-aware robotic literature. The findings have strong practical implications for UAV autonomy and open new avenues for rigorous, context-sensitive network modeling in mobile robotics.