- The paper introduces WM-LNS, a heuristic framework that decomposes global planning into WS-optimized subproblems to efficiently recover Pareto-optimal solutions.
- The paper shows that WM-LNS significantly reduces computation time, achieving up to 380× speedup and maintaining near-optimal performance in complex scenarios.
- The paper demonstrates that WM-LNS uncovers diverse trade-offs, outperforming traditional approaches by finding up to 13.2% more unique solutions.
Efficient Multi-Objective Planning with Weighted Maximization Using Large Neighbourhood Search
Introduction
The paper "Efficient Multi-Objective Planning with Weighted Maximization Using Large Neighbourhood Search" (2604.04826) investigates the challenge of computing Pareto-optimal paths in robotic environments when planning must simultaneously optimize multiple objectives. This is relevant for scenarios such as autonomous navigation, where trade-offs between objectives such as path length, safety, and risk must be balanced. Conventional approaches, most notably the Weighted Sum (WS) scalarization, fail to recover all Pareto-optimal solutions, particularly those in non-convex regions of the Pareto front. The Weighted Maximum (WM, Chebyshev scalarization) method, though Pareto-complete, typically incurs prohibitive computational cost in discrete spaces due to NP-hardness. The paper proposes WM-LNS, a heuristic Large Neighbourhood Search framework, to address the computational bottleneck associated with discrete WM problems without sacrificing solution quality.
Background and Limitations of Weighted Sum Scalarization
Traditional scalarization methods such as WS transform a multi-objective problem into a single-objective optimization by assigning weights to each objective. The main drawback is the geometric restriction: WS only recovers Pareto-optimal solutions in the convex region of the Pareto front. The WM approach, which selects the maximum weighted objective for each solution, can recover solutions in both convex and non-convex regions, achieving Pareto-complete coverage.
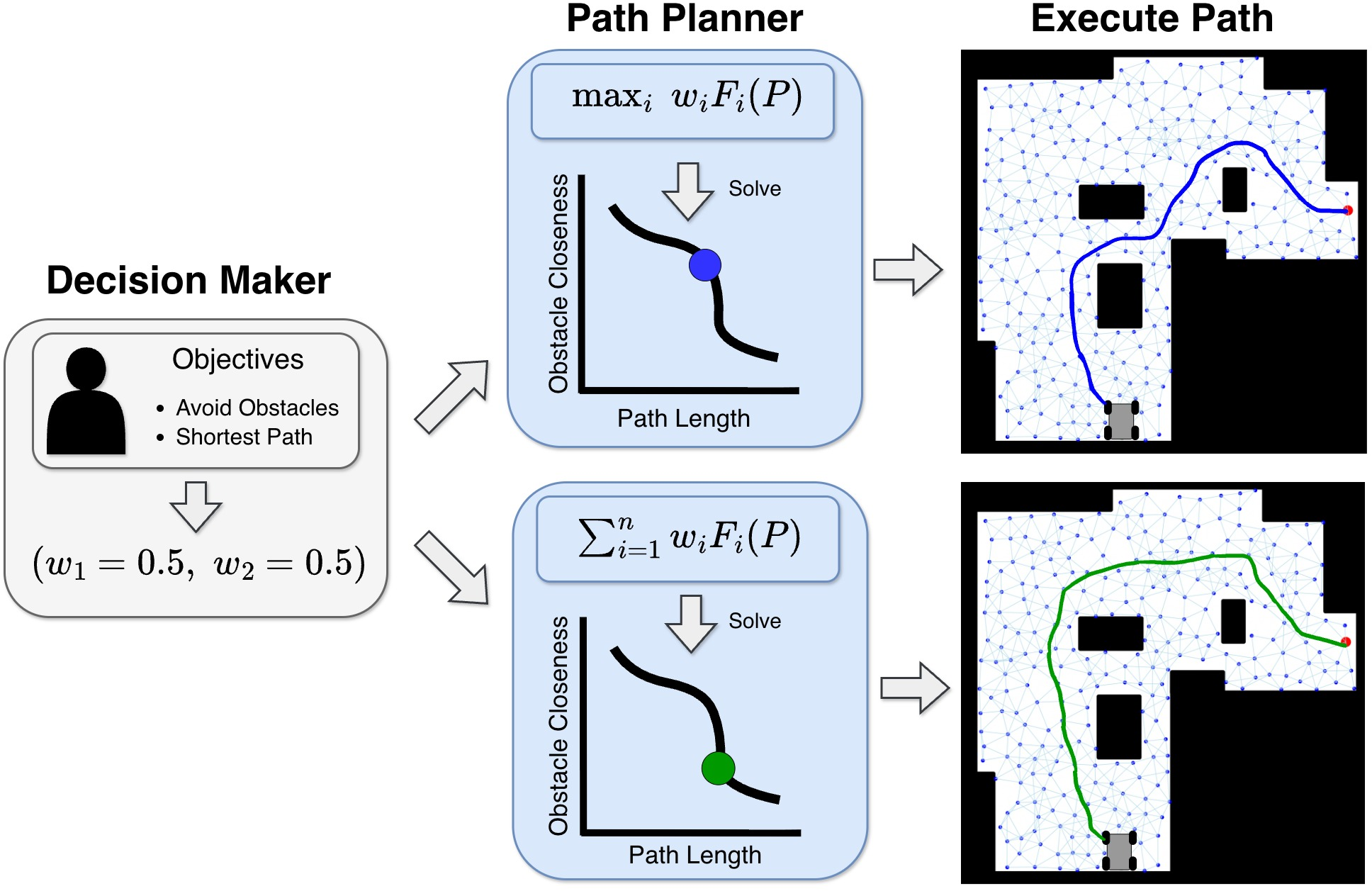
Figure 1: Solving multi-objective path planning problems via scalarization; WS cannot return solutions in non-convex regions of the Pareto front.
The paper establishes a worst-case approximation bound: any solution returned by WS incurs at most an n-factor degradation in WM cost compared to the true WM optimum, where n is the number of objectives. Furthermore, the problem of finding the best WS approximation of a WM solution is proven to be NP-hard. These results concretely limit the practical efficacy of WS in general multi-objective settings.
Subproblem Convexity and Algorithmic Framework
The paper observes that certain subpaths of WM-optimal solutions, when considered as local subproblems, often lie on convex regions of their respective subproblem Pareto fronts, permitting efficient recovery by WS. Exploiting this, WM-LNS iteratively decomposes the global path into segments and solves each as a WS-optimized subproblem, thus harnessing efficient polynomial-time methods for local search while retaining global Pareto completeness.
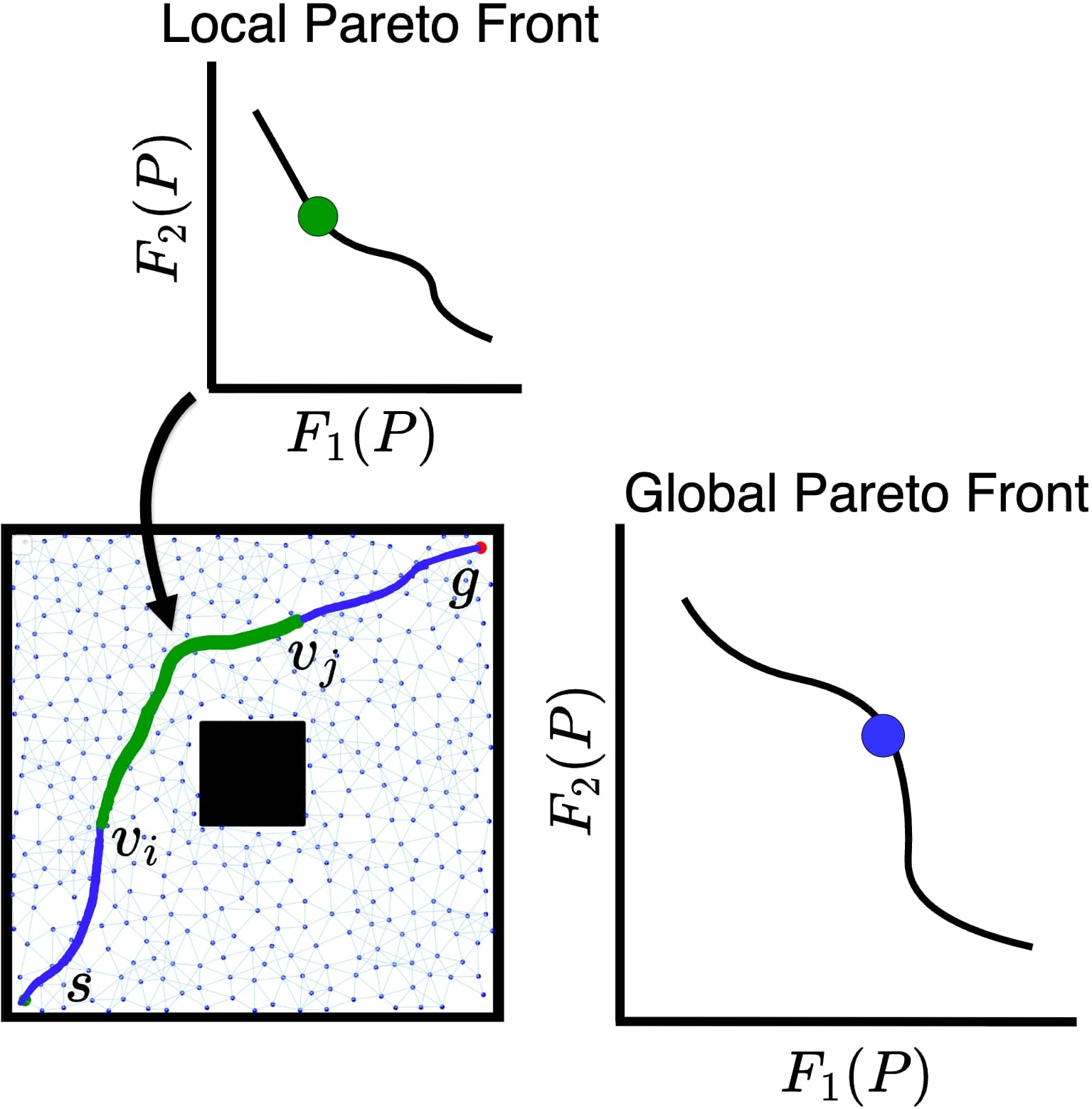
Figure 2: The geometry of the Pareto front changes across global and local subproblems, enabling convexity exploitation via local WS optimization.
The WM-LNS Algorithm
WM-LNS employs a stochastic, adaptive Large Neighbourhood Search meta-heuristic to solve the WM planning problem efficiently. The workflow is as follows:
- Initial Solution Generation: A beam search variant of the WM-poly algorithm quickly yields an initial suboptimal WM path using a constrained open list mechanism, balancing solution quality and computational budget.
- Destroy Procedure: Multiple heuristics are used to selectively remove local segments from the current path, targeting both poorly-balanced and well-balanced regions to escape local minima and ensure search diversity.
- Repair Procedure: Removed segments are reconstructed using WS scalarization and A∗, with adaptive weight selection. For high-dimensional objectives, derivative-free optimization (Generalized Pattern Search) is used to sample weight vectors efficiently.
- Simulated Annealing Acceptance: Solutions are accepted based on WM cost difference, with temperature-based probabilistic acceptance to avoid premature convergence.
- Adaptive Heuristic Selection: Destroy heuristics are scored and selected probabilistically using a reward-based mechanism, promoting those most effective per instance.
Numerical Analysis and Results
WM-LNS is empirically evaluated against exact, suboptimal, and WS-based solvers across diverse planning tasks and environments. The main findings are:
- Solution Diversity: WM-LNS uncovers more diverse trade-offs than WS, achieving up to 13.2% more coverage and 246.7% more unique solutions in 2-objective settings.
- Runtime and Solution Quality: On large graphs (e.g., PRMs of up to 2500 nodes), WM-LNS achieves 4.5× to 12× speedup relative to exact WM solvers, with mean percentage error below 3% in large-scale multi-objective settings.
- Applicability: WM-LNS generalizes to complex planning, including 7-DOF manipulator navigation, achieving a 380× speedup over WM while maintaining <1.1% error from optimum.
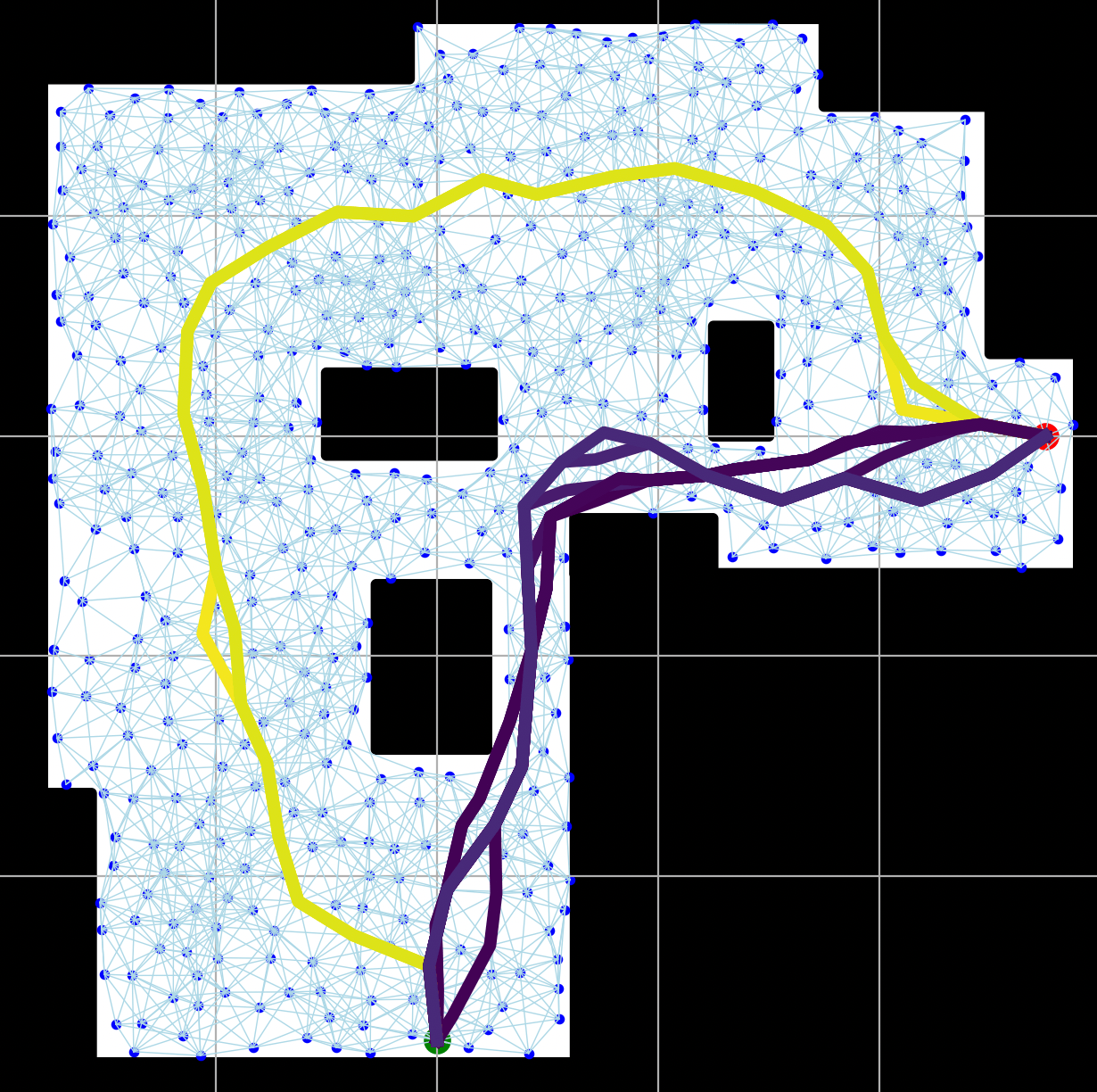
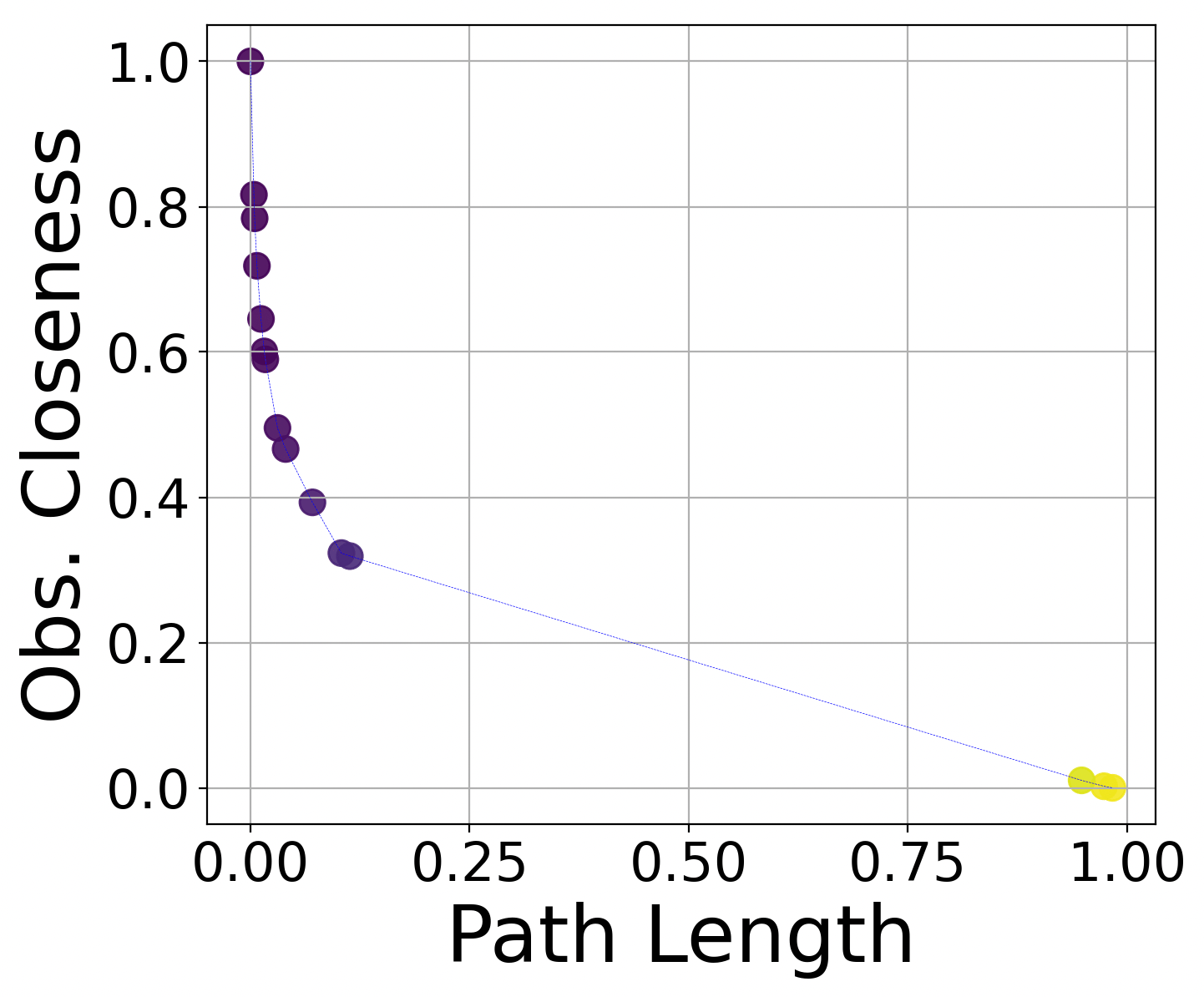
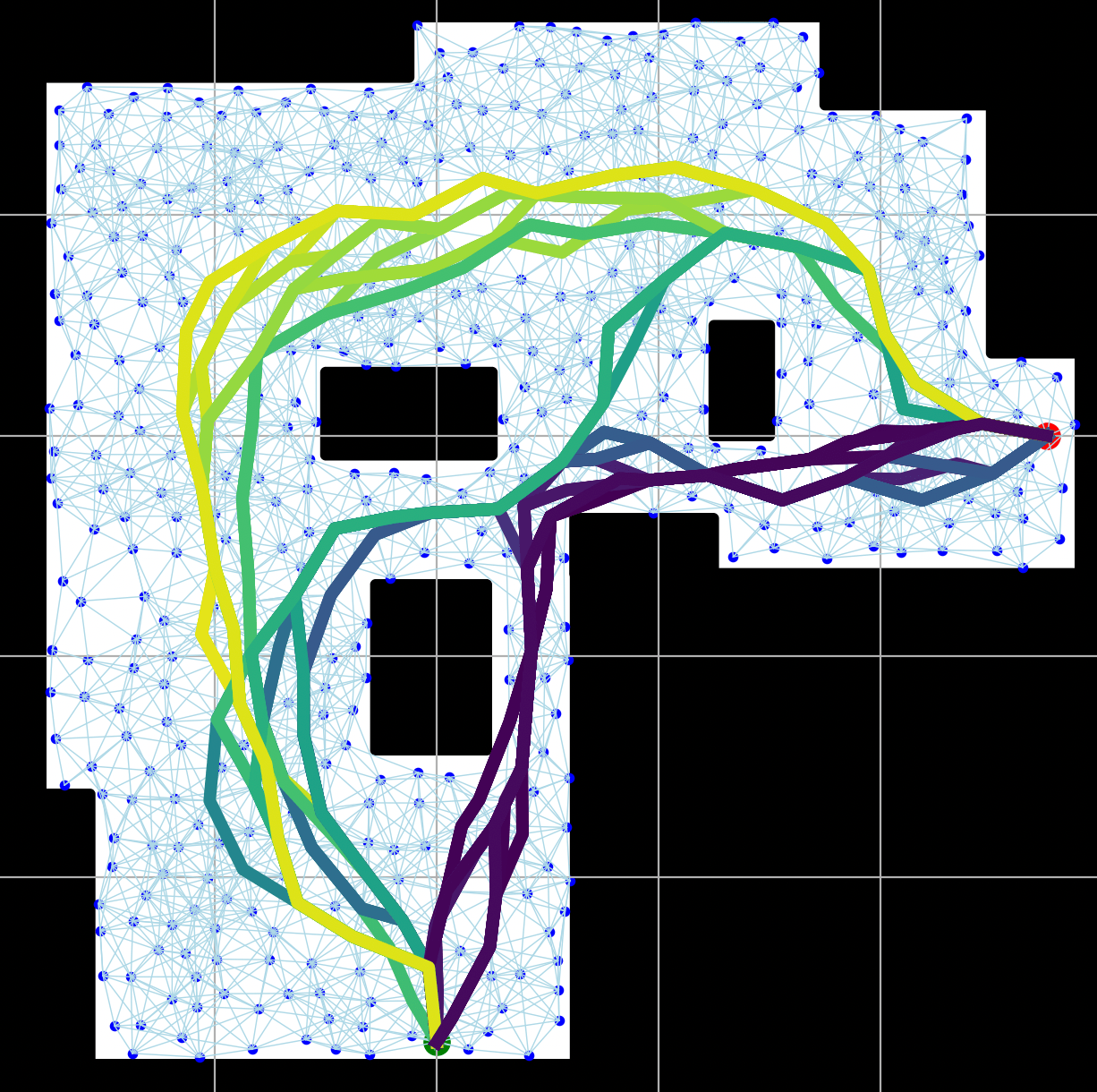
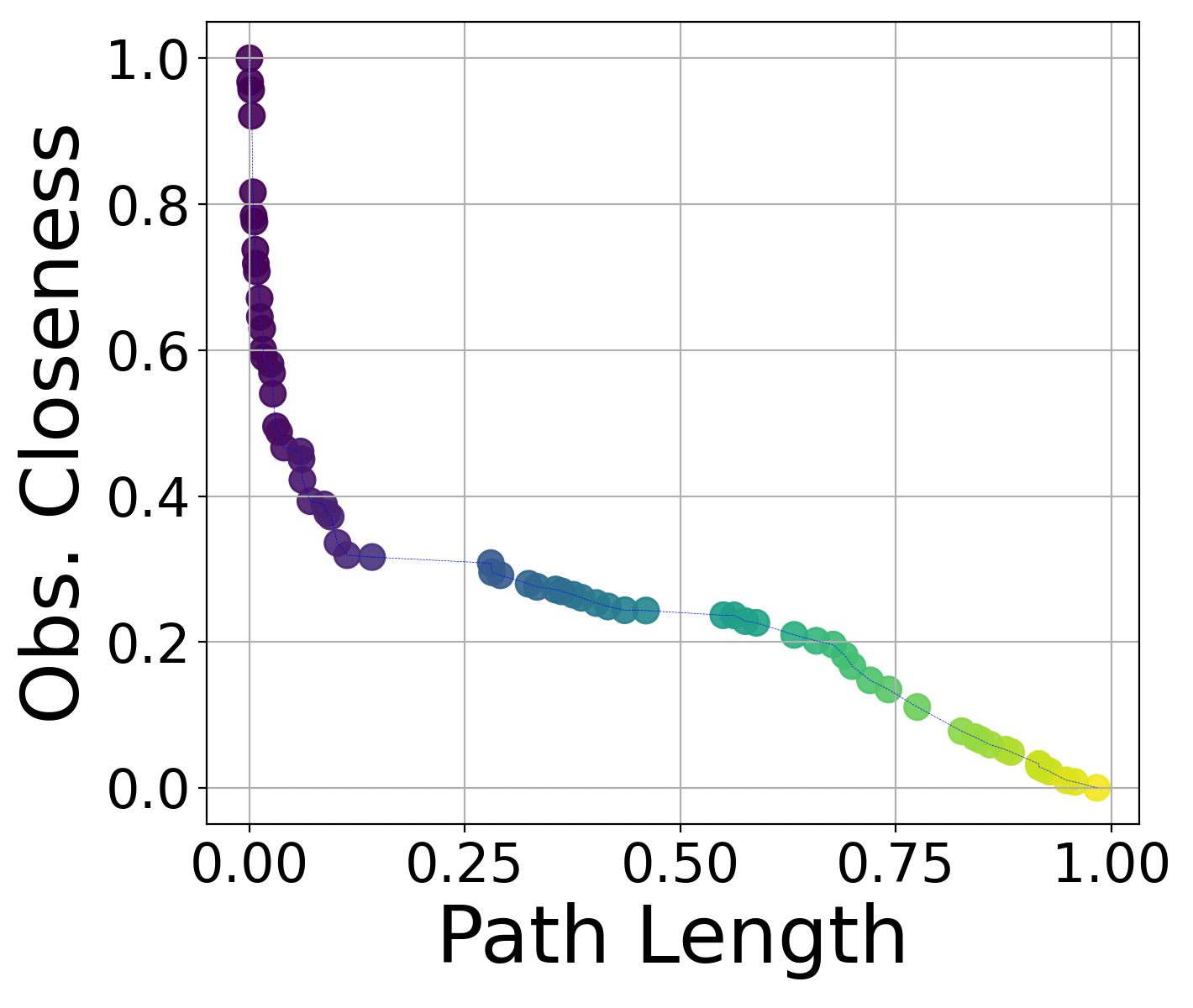
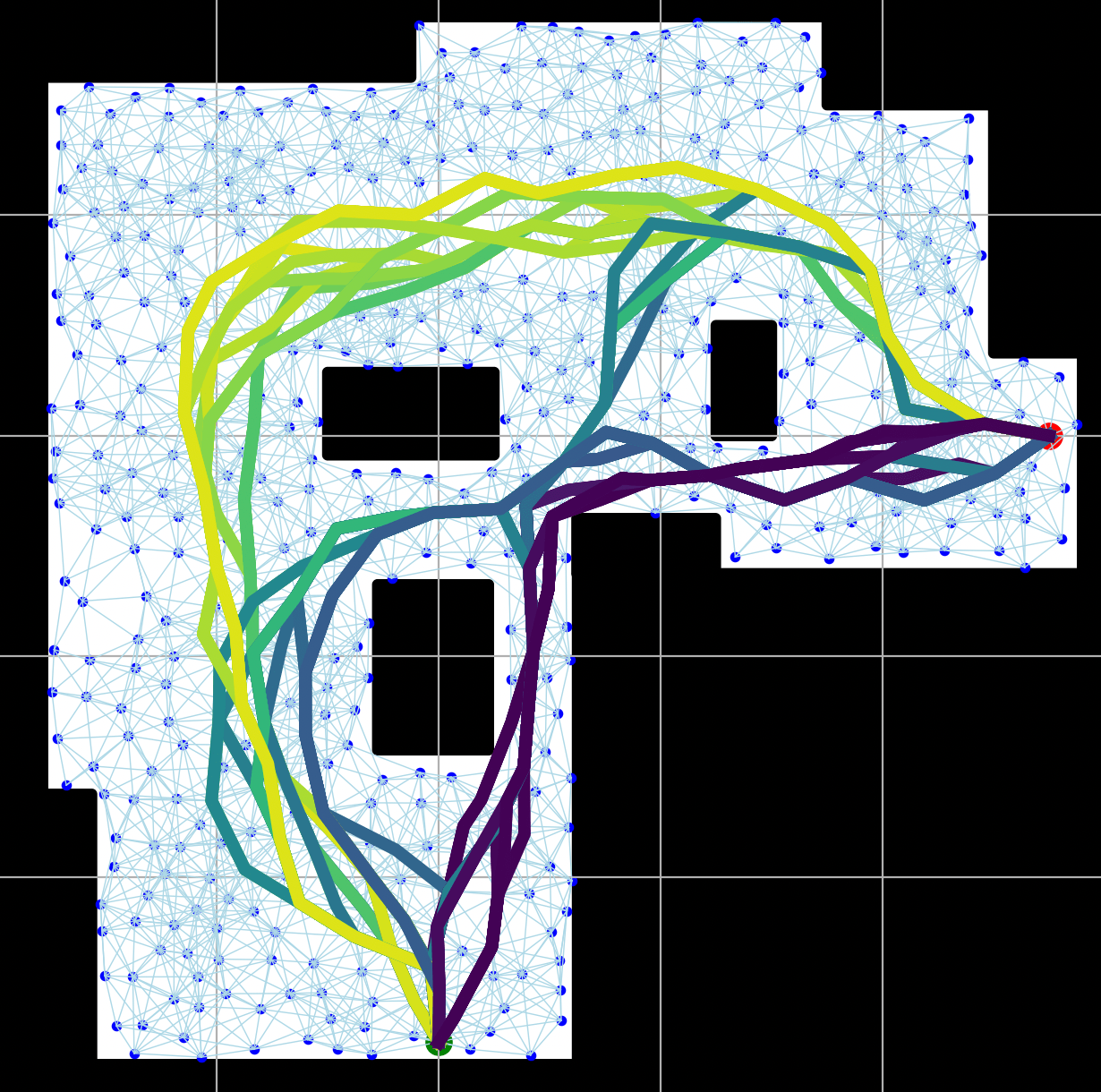
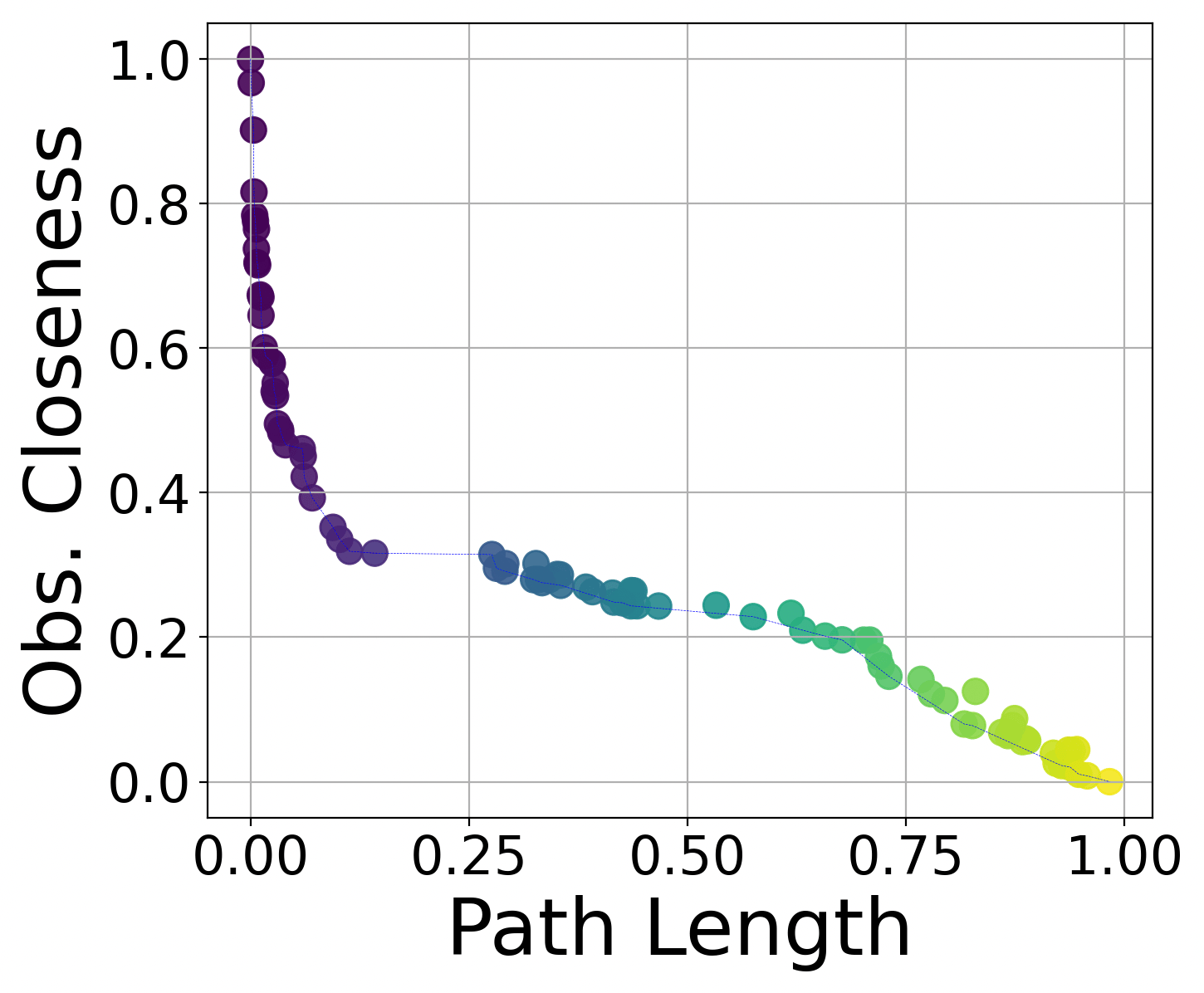
Figure 3: Solution sets visualization for WS, WM, and WM-LNS, demonstrating superior trade-off coverage and solution diversity for the proposed method.
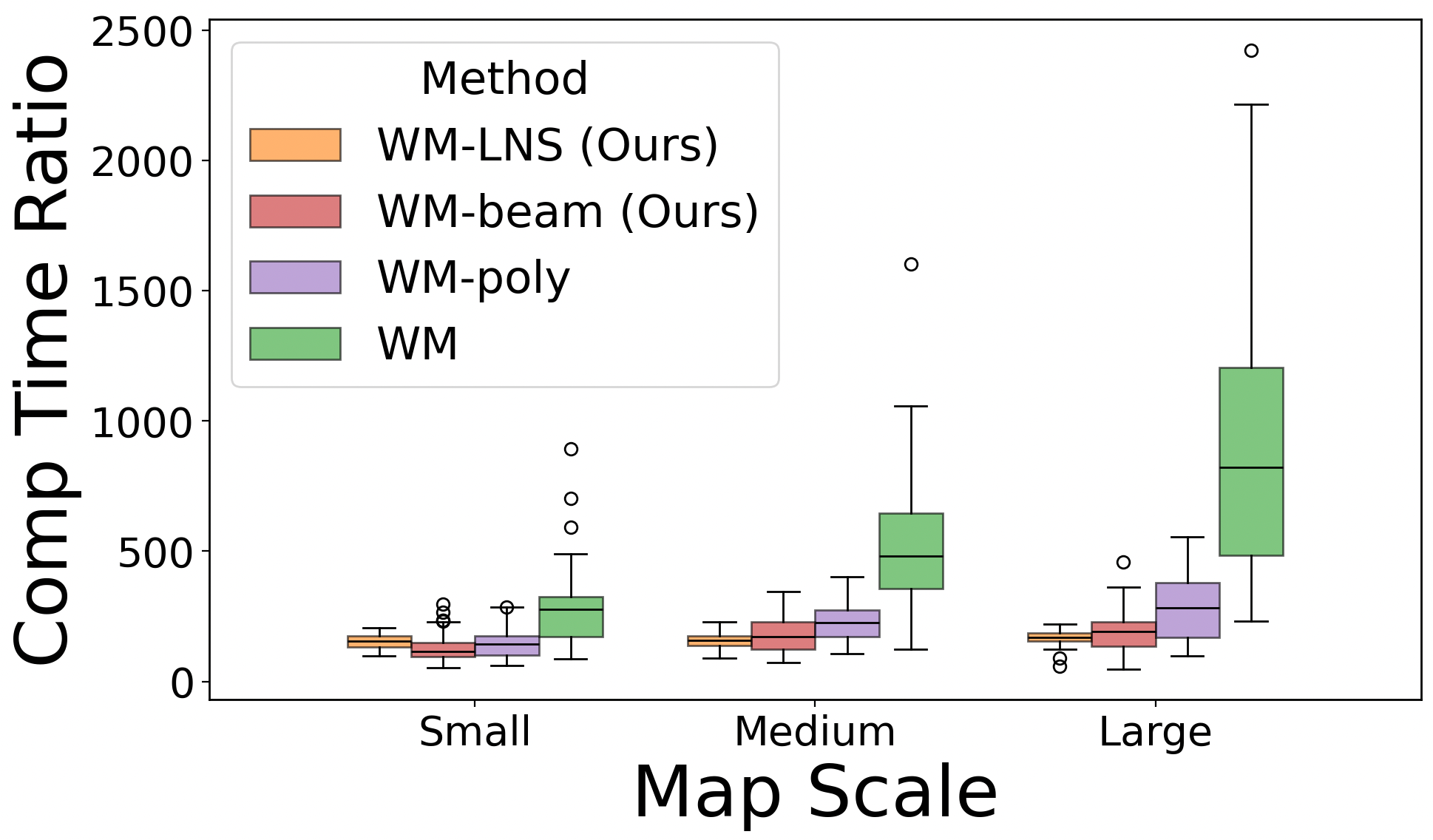
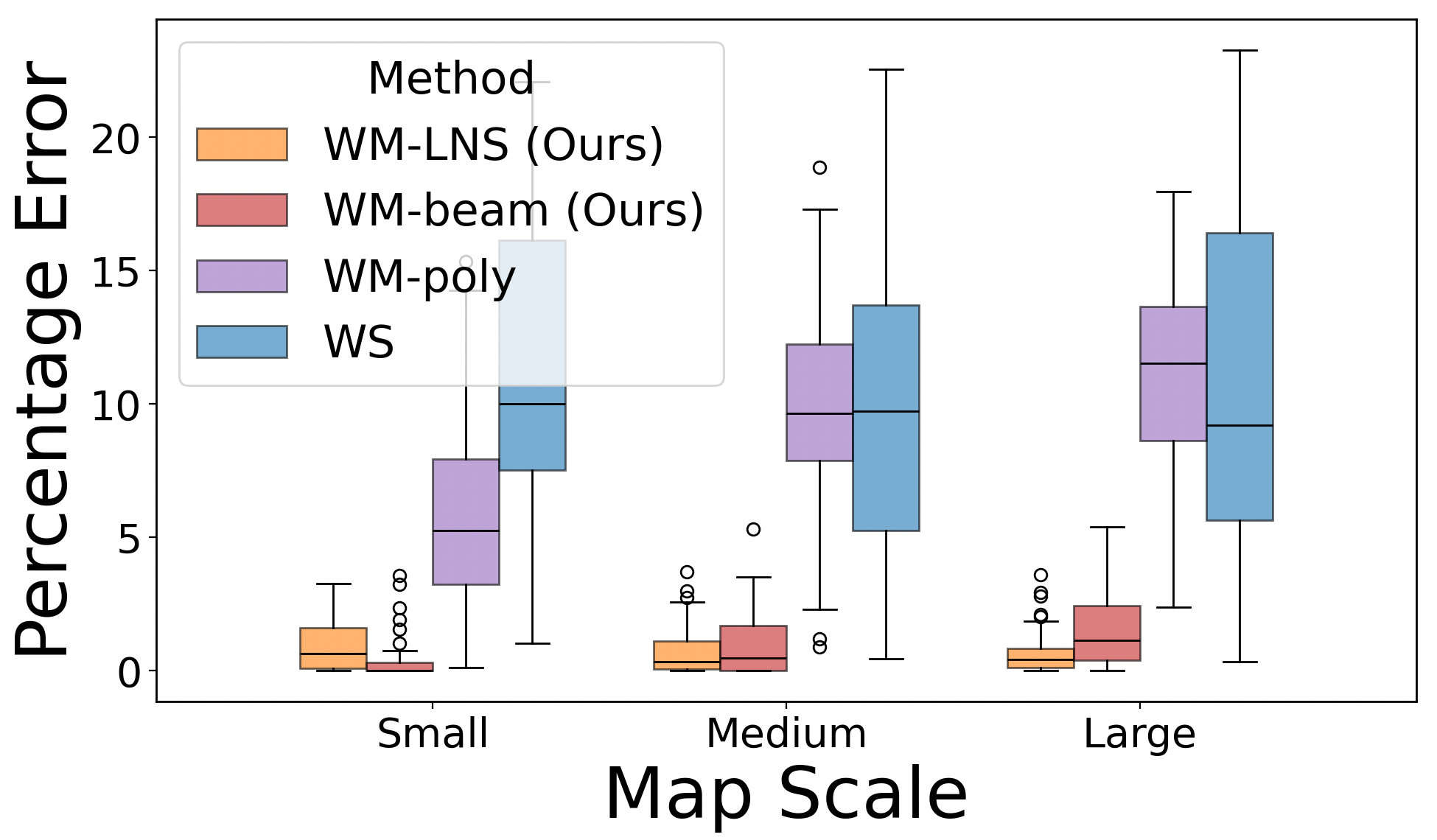
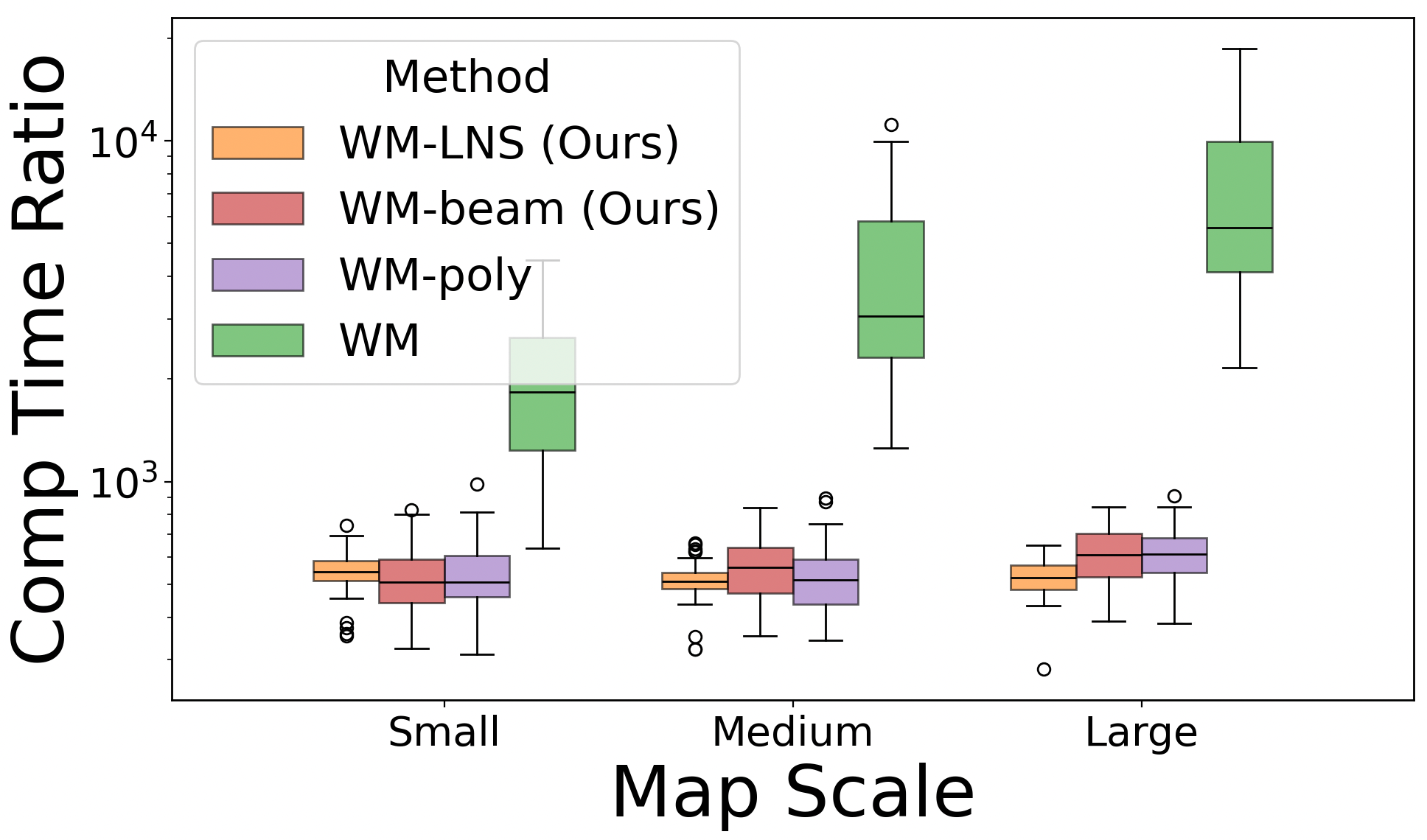
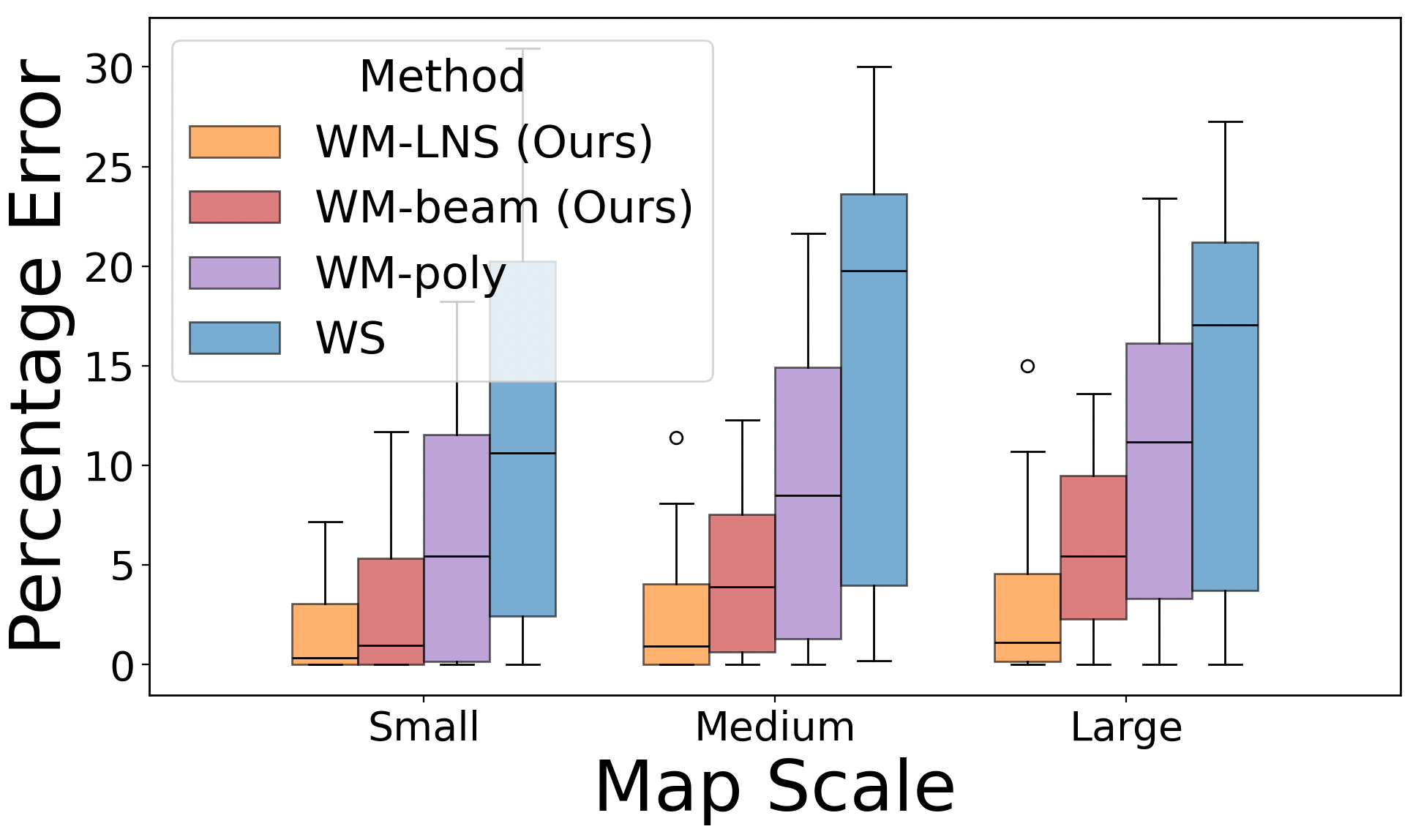
Figure 4: Simulation results for the maze environment; WM-LNS displays efficient scaling in runtime and low optimality loss.
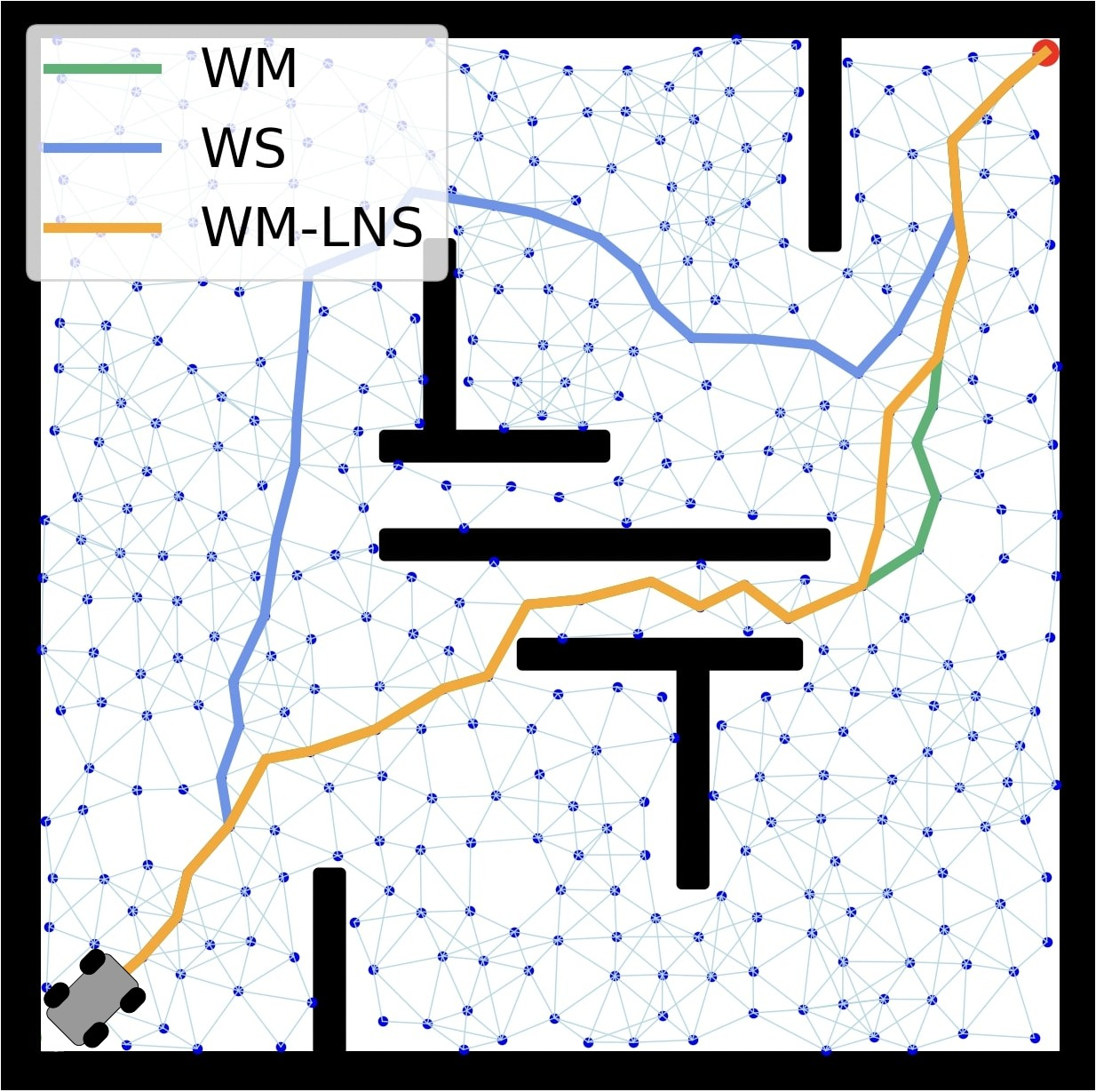
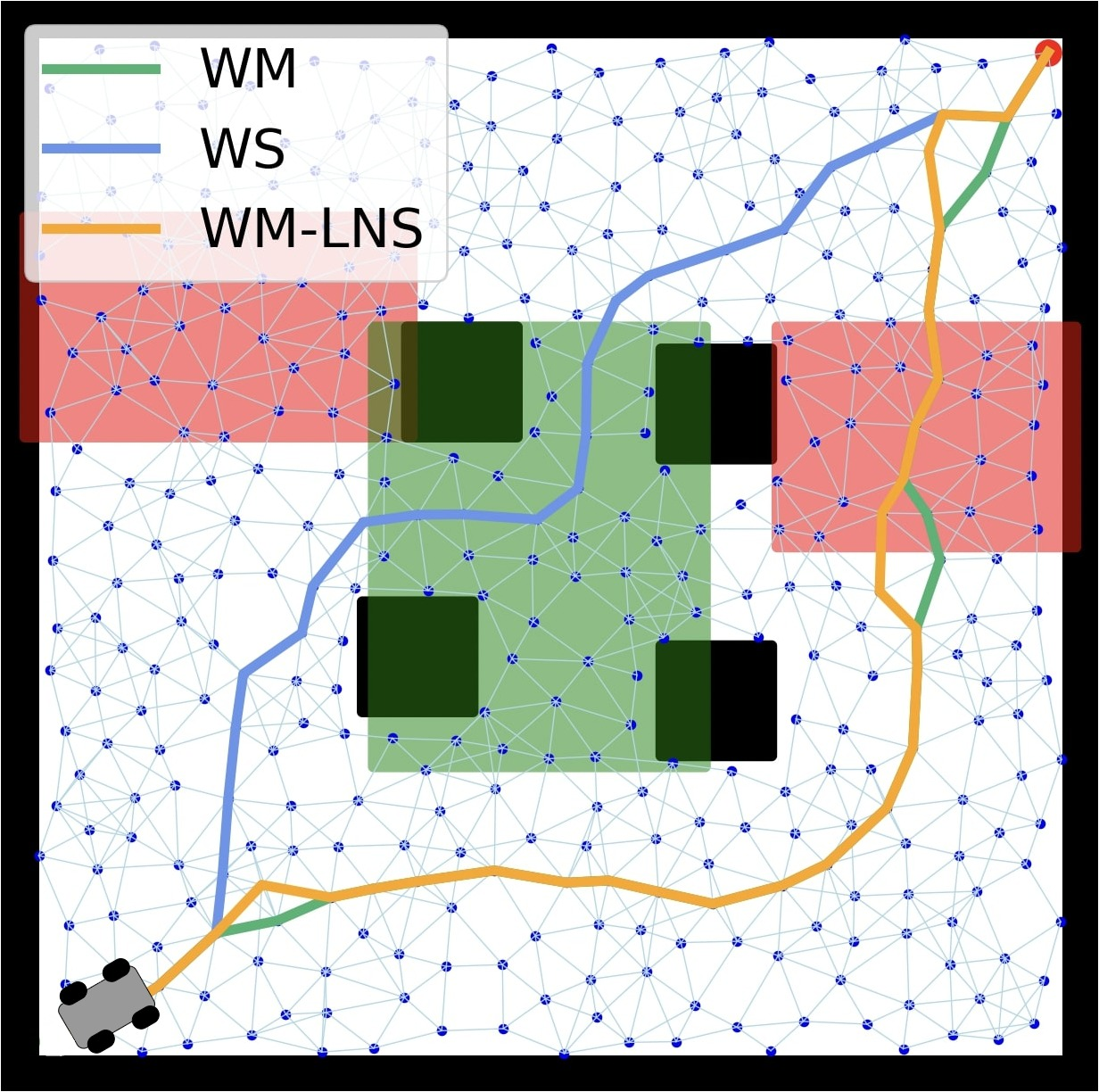
Figure 5: Test maps indicating objective zones and path solutions for balanced weighting.
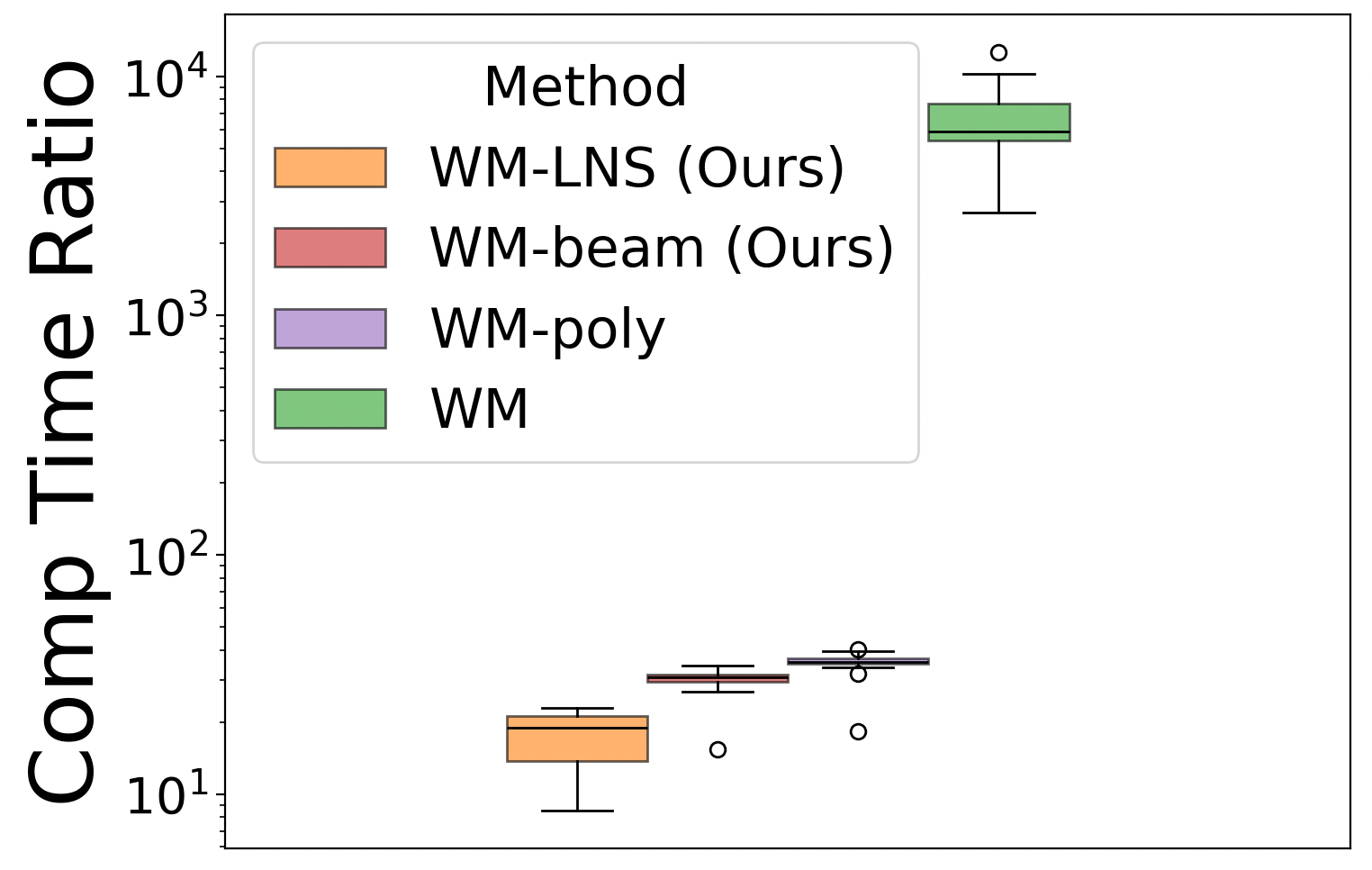
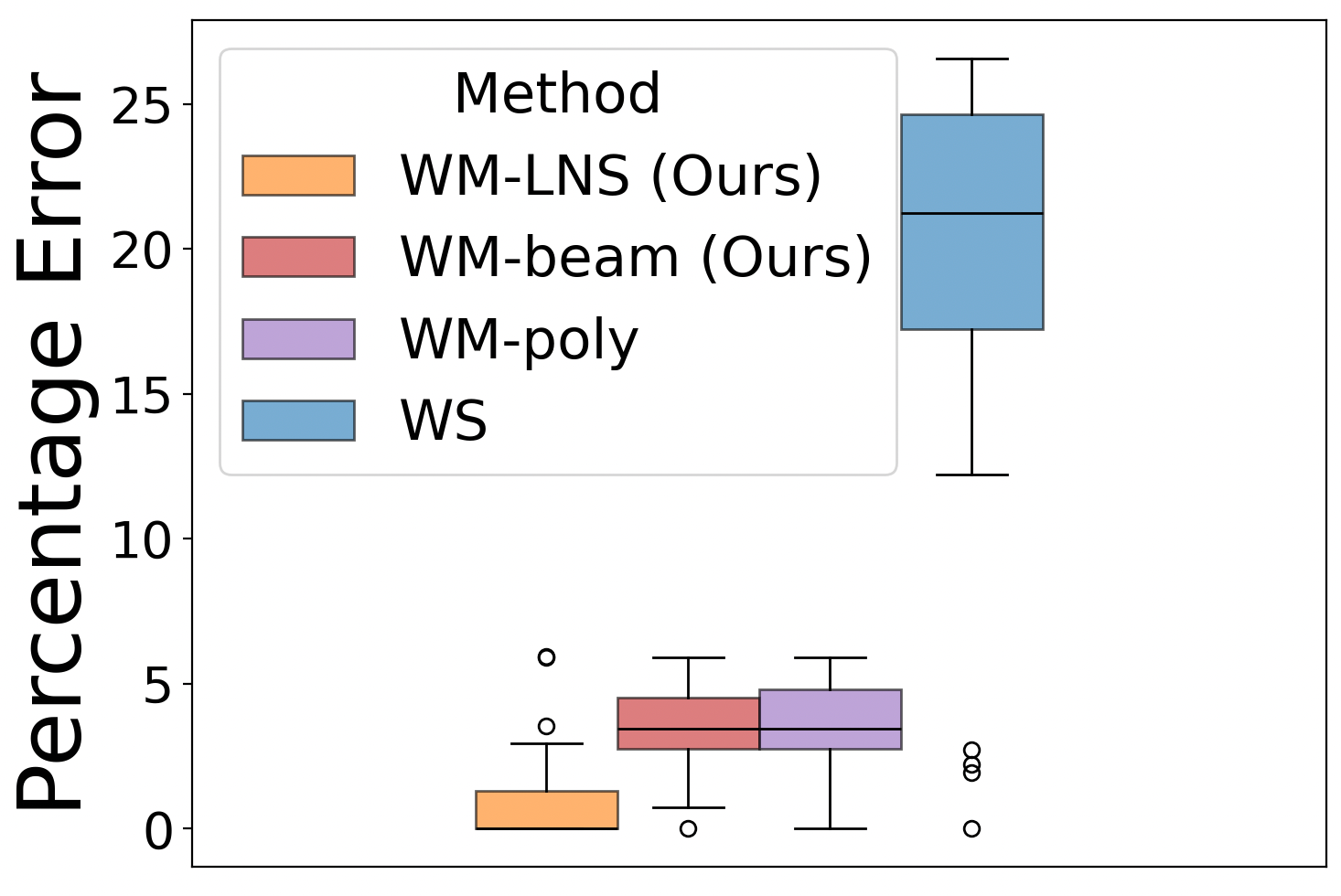
Figure 6: Manipulator planning results indicating the computation time ratio and percentage error for WM-LNS against baselines.
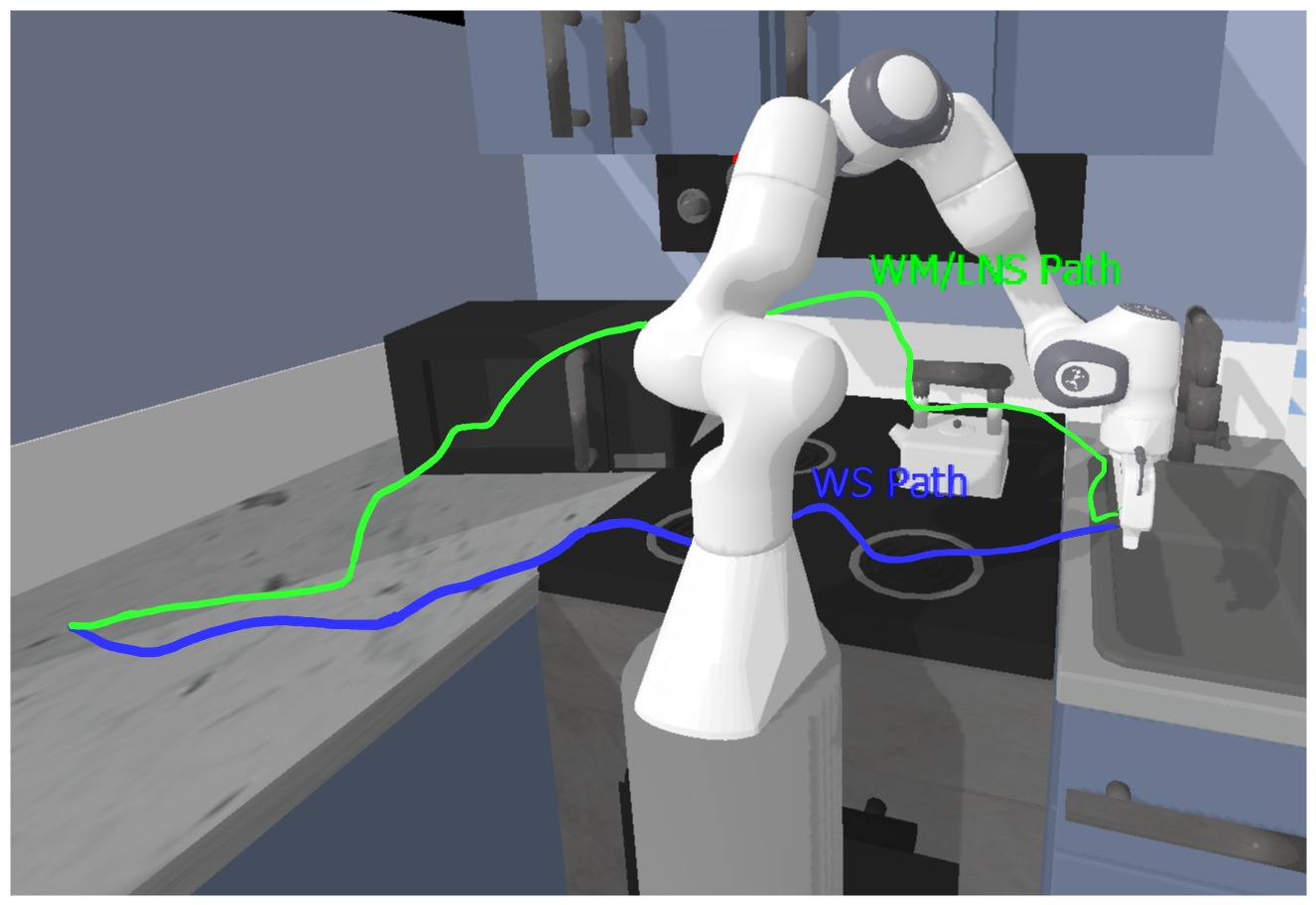
Figure 7: Multi-objective kitchen planning solution; WM-LNS recovers WM-optimal and diverse paths that WS cannot.
Implications and Future Directions
WM-LNS addresses the computational intractability of WM-based multi-objective planning in discrete spaces, enabling practical Pareto-complete planning even with numerous objectives. The formal performance guarantees and empirical results strongly suggest that LNS-based decomposition combined with adaptive local WS solves is a scalable pathway for multi-objective robotic planning.
Theoretically, the results motivate further exploration into structural links between WM and WS subproblems, and more sophisticated neighborhood selection or weight sampling strategies based on domain-specific properties. Practically, the availability of diverse balanced solutions facilitates interactive planning and preference modeling in human-in-the-loop or safety-critical autonomous systems, where unsupported trade-offs are frequently desired.
Conclusion
WM-LNS delivers efficient, near-optimal, and diversified solutions to the NP-hard WM scalarized multi-objective planning problem in discrete environments. Its hybrid methodology leverages subproblem convexity, adaptive heuristics, and advanced sampling to achieve significant reductions in computation time without compromising solution quality. The approach advances the applicability of Pareto-complete planning in robotics, with potential for further improvements via deterministic approximation and structural analysis of subproblem spaces.