Crazyflow: An Accurate, GPU-Accelerated, Differentiable Drone Simulator in JAX
Abstract: High-quality, large-scale synthetic data from simulations is becoming a cornerstone for pushing the capabilities of robot algorithms. While aerial robotics simulators have evolved to support specialized needs such as fidelity, differentiability, and swarms independently, a unified platform that can synthesize data across all these domains is missing. In this work, we propose Crazyflow, a simulator designed to push the limits of aerial-robotics algorithm development, from model-based to data-driven methods, gradient-based to sampling-based approaches, and single-agent to multi-agent systems. Compared to existing state-of-the-art drone simulators, it achieves speeds more than an order of magnitude faster for a single drone and can simulate thousands of swarms of 4000 drones each. Real-world experiments show Crazyflow supports both analytical-gradient-based policy learning, achieving sub-centimeter trajectory tracking accuracy without domain randomization, and sampling-based obstacle avoidance at speeds exceeding half a billion steps per second. Breaking the traditional train-then-deploy paradigm, we show that its unprecedented speed even enables in-flight reinforcement learning; we demonstrate this by throwing a physical drone into the air and training a recovery policy from scratch in 0.38 seconds, successfully stabilizing the drone. Crazyflow supports multiple levels of simulation abstraction, is directly compatible with all open-source Crazyflie models, and enables rapid reconfiguration across custom drone platforms and applications by providing a light-weight system identification pipeline. By pushing accuracy, speed, and differentiability simultaneously, Crazyflow serves as an open-source resource for synthetic data generation, with emerging capabilities for large-scale parallelization for online, in-execution learning and optimization, opening the door to novel algorithm development.

Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
Crazyflow: An Accurate, Super-Fast, Learnable Drone Simulator
1) What is this paper about?
This paper introduces Crazyflow, a new computer program that acts like a super realistic “video game” for drones. It lets researchers practice and test drone ideas safely on a computer before trying them in real life. Crazyflow is special because it is:
- Fast (it can run huge numbers of simulations at once),
- Accurate (it behaves very much like a real drone),
- Differentiable (it can tell you exactly how to change your controls to do better, which helps learning fast).
2) What questions did the researchers want to answer?
In simple terms, they asked:
- Can we build one simulator that is fast, precise, and gives useful feedback for learning—all at the same time?
- Can it handle both a single drone and huge swarms of drones?
- Will skills learned in the simulator work on real drones without lots of extra tricks?
- Can we train good drone controllers in seconds instead of hours or days?
- Can the simulator support many kinds of methods—both AI learning (like reinforcement learning) and classic math-based control?
3) How did they do it? (Methods explained simply)
Think of running drone tests like having a room full of helpers trying different ideas at the same time. Crazyflow uses the computer’s graphics card (GPU)—which is great at doing many small tasks in parallel—to run millions of tiny drone experiments at once.
Key ideas, with easy explanations:
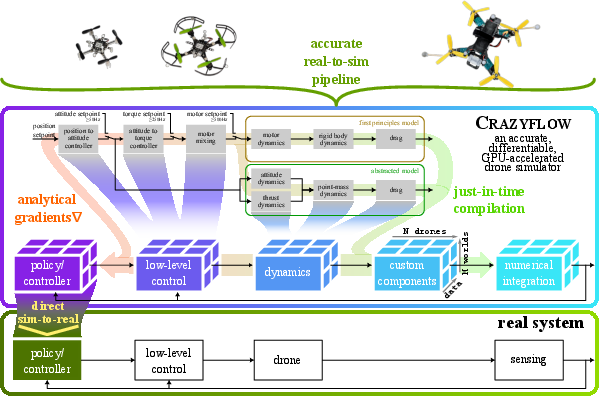
- JAX and JIT compilation: JAX is a tool that turns your Python code into fast, optimized machine code. “Just-in-time” (JIT) compilation means the computer prepares a “super efficient” version of your simulation right before it runs, like preheating an oven so cooking goes faster.
- Differentiable simulation: The simulator can compute gradients—this is like knowing the slope of a hill, so you instantly know which way to step to go down faster. In learning, gradients tell you how to change your controls to improve.
- Parallel worlds and swarms: Crazyflow can run many copies of the same test (“worlds”) at once, and each world can have a swarm (many drones). Imagine trying thousands of strategies for thousands of drones all in the same amount of time it usually takes to try one.
- Physics models at different levels:
- First-principles model: A detailed physics model from the ground up (motors → forces → movement), like building a drone model with every nut and bolt.
- Abstracted (data-driven) model: A simpler model learned from a few minutes of real flight data, like learning the “feel” of how the drone reacts.
- Sim-to-real focus: They carefully match the simulator to how real Crazyflie drones behave, including the exact onboard control software, so what works in sim also works in real life.
- Supports many control styles: From low-level rotor speeds (the raw motor commands) to mid-level commands (like desired tilt/force) to high-level commands (like “go here”).
4) What did they find, and why does it matter?
Crazyflow hit all three goals—speed, accuracy, and learnability—at once.
Main results:
- Very high speed:
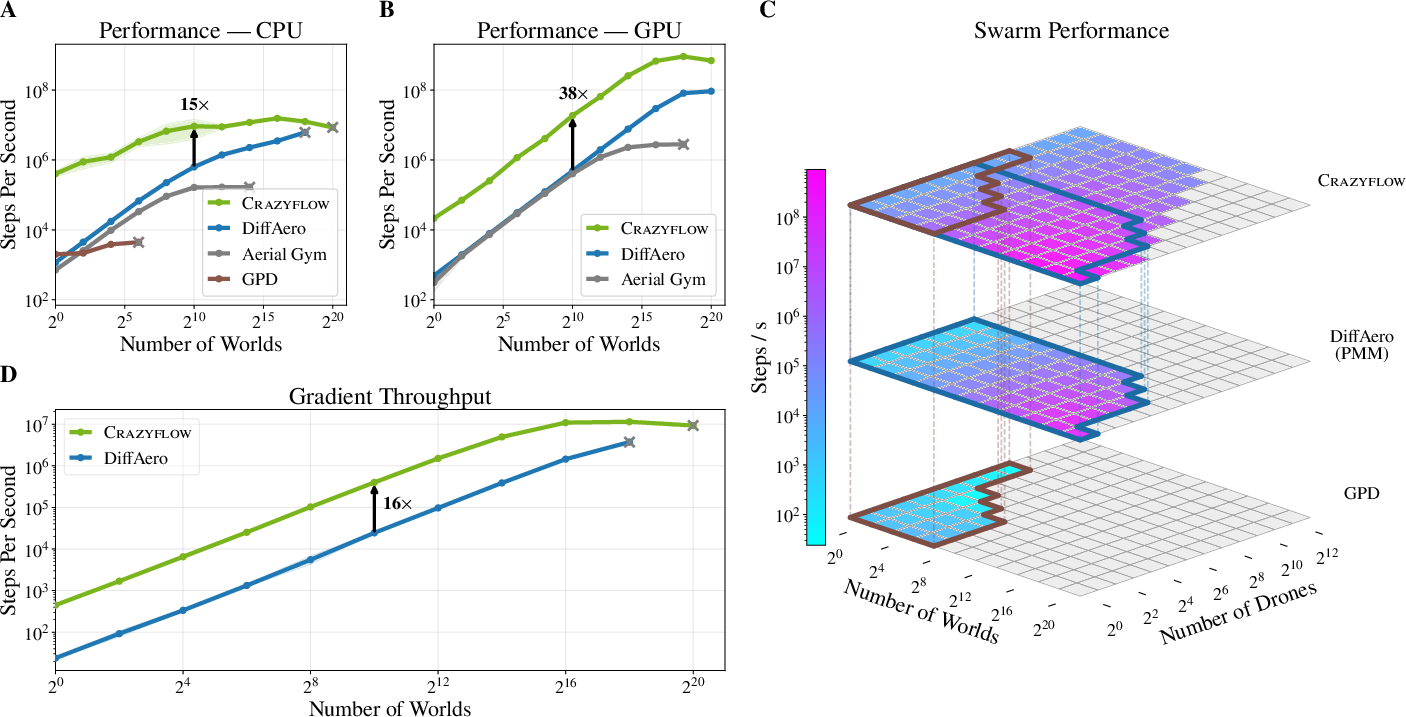
- Runs hundreds of millions of simulation steps per second on a single consumer GPU.
- Can simulate huge swarms (thousands of drones), and even thousands of swarms in parallel.
- Accurate sim-to-real behavior:
- The gap between simulation and real flight was often only a couple of centimeters.
- Compared to other popular simulators, Crazyflow reduced errors by roughly half or more on common Crazyflie drones.
- Training drone controllers in seconds:
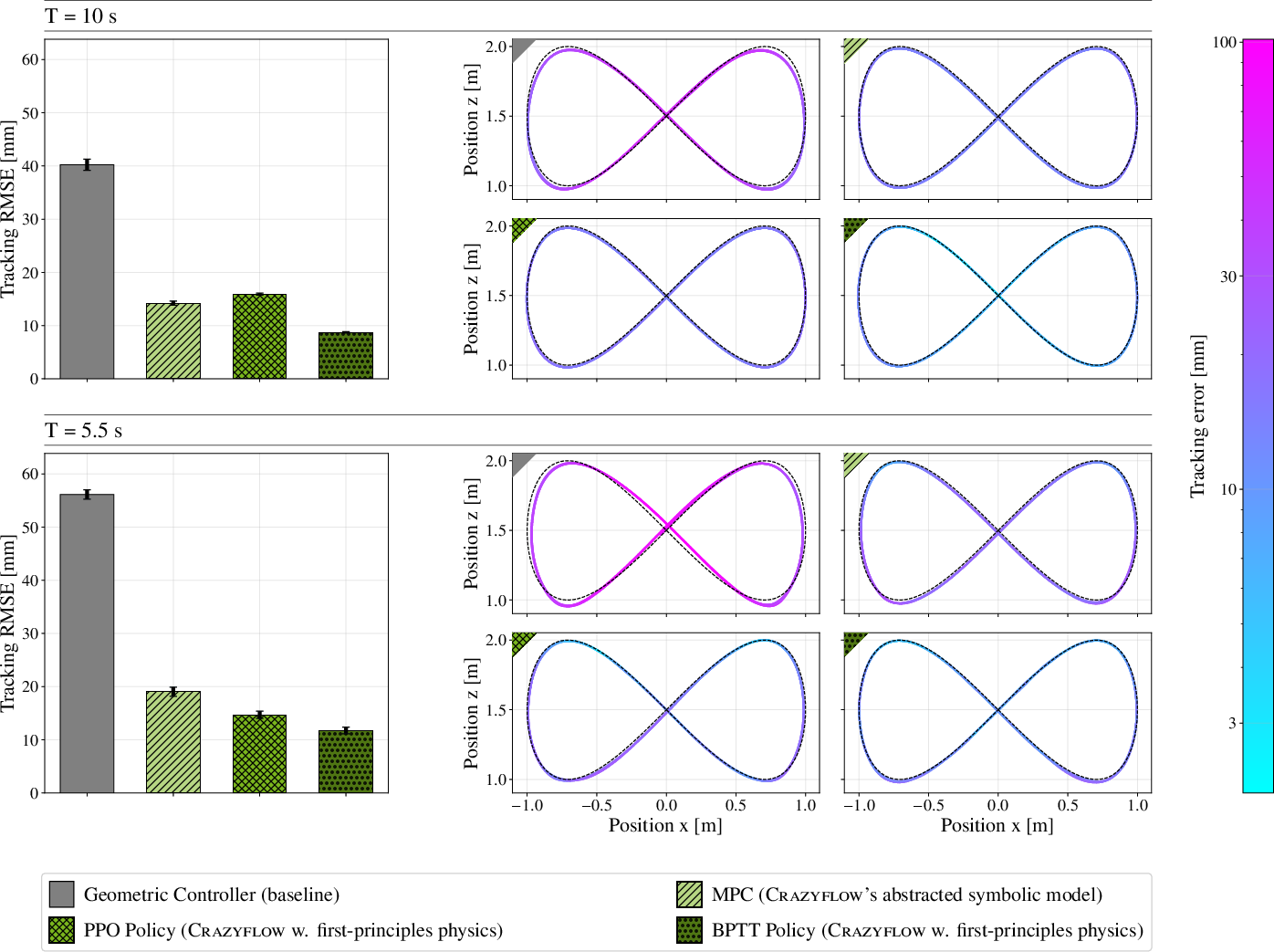
- Using standard reinforcement learning (PPO), they trained accurate tracking policies in about 1–18 seconds, depending on task speed.
- Using exact gradients (backpropagation through time), they trained even faster—down to about 1.5 seconds—with better accuracy.
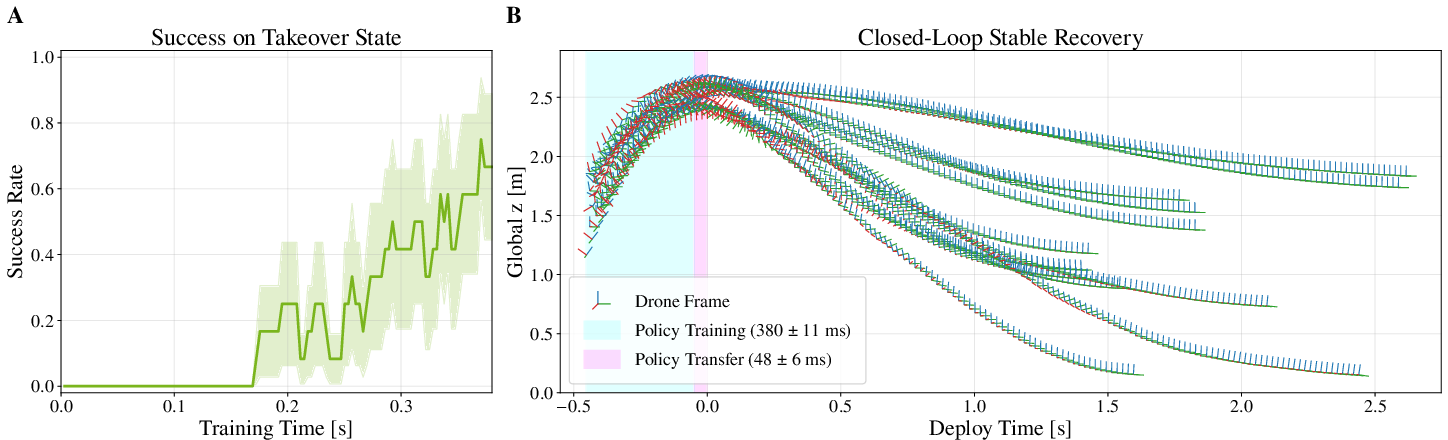
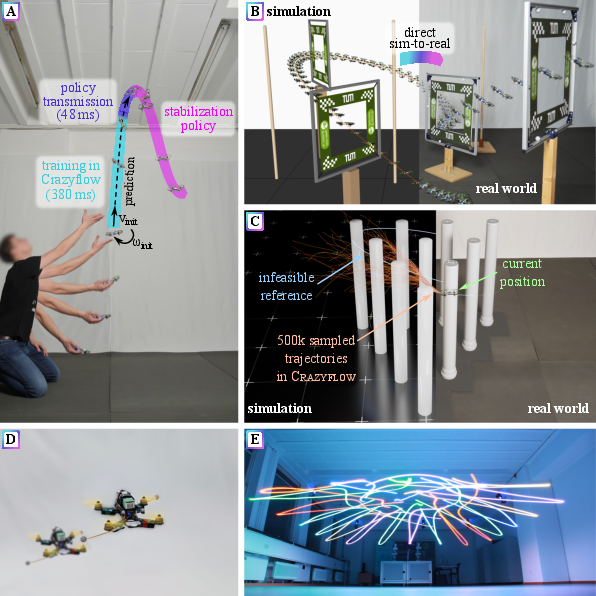
- In-flight learning:
- They literally threw a real drone into the air and trained a recovery policy from scratch in about 0.38 seconds, then used it immediately to stabilize the drone before it hit the ground.
- Works for many methods:
- Classic model-based control (like NMPC) worked well using the simulator’s math models.
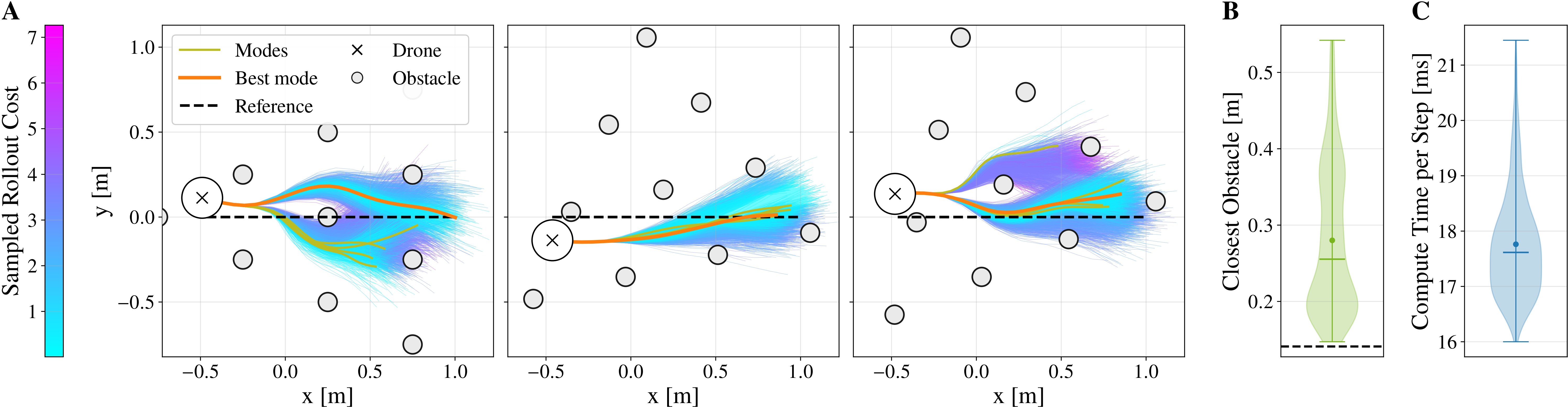
- Sampling-based control (MPPI) could test 500,000 future paths at 50 times per second—over half a billion steps per second—allowing fast, reliable obstacle avoidance.
- Easy to adapt:
- A quick system-identification process uses a few minutes of flight data to fit the simulator to a new drone model.
Why it matters:
- Faster experiments mean faster progress. You can try many ideas, tune settings, and learn good policies without long wait times or risking crashes.
- High accuracy means what works in simulation is much more likely to work in the real world.
- Differentiability unlocks super-fast learning and new ideas like learning while the drone is flying.
5) What’s the impact?
Crazyflow could change how drone research and education are done:
- Real-time, on-the-fly learning: Instead of “train first, deploy later,” drones can learn or adapt mid-flight.
- Safer, cheaper development: Try risky ideas in simulation first, with realistic results, then move to real hardware with confidence.
- Powerful for swarms: Designing and testing group behaviors for thousands of drones becomes practical.
- Bridges communities: Supports both AI learning and classic control, so teams can mix and match methods.
- Open-source and extensible: Others can build on it, add new drone models, and grow the ecosystem, speeding up advances in aerial robotics, autonomous racing, and more.
In short, Crazyflow is like a turbocharged, trustworthy flight lab on your computer: it runs huge experiments fast, matches real-world behavior closely, and gives the exact feedback needed to learn amazing drone skills in seconds.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
Below is a consolidated list of the key uncertainties and missing pieces that the paper leaves unresolved, framed to guide concrete follow-up work:
- Photorealistic RGB rendering is not supported; only batched depth via raycasting is available. How to integrate high-throughput, differentiable, photorealistic rendering (e.g., NeRFs or 3D Gaussians) with the JAX/XLA pipeline and maintain scale remains open.
- Sensor realism is limited. There is no detailed modeling of IMU bias/temperature drift, magnetometer disturbances, barometric errors, camera latency/rolling shutter, timestamp jitter, or multipath/occlusions. A calibrated, configurable sensor suite with validated noise/latency models is needed.
- State estimation pipelines (e.g., EKF/VIO) are absent. It is unclear how estimation delay, filter tuning, and drift affect sim-to-real performance; a plug-in, optionally differentiable estimator stack is needed for realistic closed-loop testing.
- Aerodynamic effects are only “configurable” but not fully specified or validated. Ground effect, propwash, blade flapping, rotor–body interference, cross-coupling between rotors, and wind/turbulence models (including spatially varying gust fields) require explicit models and real-world validation.
- Swarm-specific aerodynamics (downwash and wake interaction between vehicles) are not modeled or validated. This limits realism for close formations; data-driven or simplified interaction models and multi-drone experiments are needed.
- Contact/collision dynamics are unclear. The simulator “avoids the costly solve step” typical of general engines; it is not evident how drone–obstacle or inter-vehicle collisions, prop strikes, and ground contact are handled or differentiated through.
- Communication/network constraints for swarms (latency, packet loss, bandwidth limits, scheduling) are not modeled. A network-in-the-loop layer is needed to study robustness of distributed policies and controllers.
- Environmental interaction with structures (e.g., aerodynamic effects near walls, doorways, ducts) is not modeled or validated; tools to define spatially varying flow fields and wall effects would improve realism for indoor flight.
- Real-world validation is narrow in scope. Results focus on motion-capture indoor tracking of circles/Lissajous at limited speeds. Missing are: aggressive maneuvers (high-rate flips, racing), payload changes, battery voltage sag/aging, prop damage, temperature effects, and outdoor wind.
- Abstracted (data-driven) model identification lacks guidance on excitation design, sample complexity, and coverage. Robustness to distribution shift (new payloads, controllers, or operating regimes) and re-identification triggers are not quantified.
- Portability of the abstracted model across controllers (PX4/Betaflight/ArduPilot) is untested beyond a single PX4 setup; repeatability across different firmware versions and tuning is unknown.
- First-principles motor/prop models are validated mainly for Crazyflie variants. Generalization to diverse motors/ESCs (nonlinearities, dead zones, saturation, back-EMF, temperature/voltage dependence) remains to be established.
- Gradient-based training scalability is under-characterized. Throughput is reported for short horizons (10 steps); memory/time scaling, gradient accuracy, and stability for longer horizons and higher-frequency loops are not analyzed.
- Differentiability through non-smooth elements (e.g., actuator saturation, rate limiters, conditional branches, mode switches) is not examined; the impact on gradient quality and learning stability is unclear.
- Safety of “in-flight” learning is not addressed. Required safety monitors, fallback controllers, safe set constraints, and certification considerations for online policy updates are unspecified.
- Rendering pipeline exhibits higher memory consumption; there is no detailed characterization of memory–throughput trade-offs versus resolution/world count or strategies for multi-GPU tiling.
- Hardware portability and determinism are not evaluated across device families (AMD GPUs, TPUs), multiple GPUs, or distributed settings; reproducibility and numerical determinism across hardware/backends need study.
- Extensibility to other aerial platforms (hexacopters, tilt-rotors, coaxials, hybrid VTOL, fixed-wing) is not demonstrated; required modeling abstractions/interfaces are not specified.
- Numerical integration details are missing (integrator type, step size control, stiffness handling). Sensitivity to time step, error control, and their effect on gradient fidelity and stability at extreme scales are open questions.
- Benchmark scope is limited. A broader, open suite covering agile acrobatics, vision-in-the-loop navigation, obstacle-rich environments with tight margins, and contact-rich tasks is needed for fair comparisons.
- Fairness of performance comparisons is uncertain. Differences in controller inclusion/fidelity and crashes/resource limits confound apples-to-apples claims; standardized configs, seeds, and ablations (e.g., with/without controllers in-graph) are needed.
- Real-world swarm validation is minimal. There is no empirical assessment of large multi-drone deployments capturing communication, downwash, and formation-keeping under disturbances; systematic field trials are needed.
- Hardware-in-the-loop/software-in-the-loop coverage is partial. Direct SITL/HIL integration with PX4/Betaflight/ArduPilot, including logging, timing fidelity, and optional differentiability, remains to be built and validated.
- Uncertainty quantification is absent. Methods to estimate/model parameter and model-form uncertainty, and to propagate it to robust control or risk-sensitive RL, are not provided.
- Governance for shared model parameters and datasets is unspecified. A versioned “model zoo” with identification logs, calibration data, and validation tests would help prevent parameter drift and improve reproducibility.
Practical Applications
Immediate Applications
The paper’s findings and tools enable several deployable workflows today across research labs, startups, education, and parts of industry.
- Rapid training and deployment of high-accuracy tracking controllers without domain randomization
- Sectors: robotics R&D, startups, academia, drone OEMs
- Tools/workflows: PPO or BPTT training in Crazyflow (cm-level accuracy in seconds), direct deployment to Crazyflie-class drones; NMPC prototyping with CasADi/acados using the provided symbolic models
- Assumptions/dependencies: access to a capable GPU; correct mass/inertia/aerodynamic parameters or use of the built-in system identification pipeline; currently strongest sim-to-real evidence is for Crazyflie-scale and a tested 660 g custom quad
- Real-time, sampling-based obstacle avoidance using full dynamics (MPPI at 50 Hz)
- Sectors: inspection (infrastructure, construction), indoor logistics/warehousing, research labs
- Tools/workflows: Crazyflow-accelerated MPPI with 500k parallel rollouts per control cycle; deploy the resulting control sequences on physical platforms
- Assumptions/dependencies: sufficient onboard or edge compute (e.g., Jetson-class GPU); reliable obstacle sensing and state estimation; tuning safety margins; controller latency budgets
- High-throughput swarm choreography design, verification, and rehearsal
- Sectors: entertainment/events (drone shows), advertising, creative tech
- Tools/workflows: use Crazyflow to validate and iterate on multi-drone choreographies (e.g., SwarmGPT + Crazyflow), stress-test formations, enforce minimum separation, and export deployable waypoints
- Assumptions/dependencies: alignment between simulated and show-hardware flight envelopes; show-specific communication and localization constraints; regulatory approvals for live performances
- Scalable multi-agent learning and benchmarking (single-drone to large swarms)
- Sectors: academia (multi-agent RL/control), industrial R&D
- Tools/workflows: massive parallel training/validation, fair hyperparameter sweeps, action-representation studies; reproducible pipeline leveraging JAX JIT and vectorization
- Assumptions/dependencies: GPU memory/throughput at desired scales; careful seed/hyperparameter management for fair comparisons; optional logging/experiment tracking (e.g., Weights & Biases)
- Fast system identification and “digital twins” for new quadrotor platforms
- Sectors: drone manufacturers, system integrators, research labs
- Tools/workflows: minutes-long flight-data collection; fit Crazyflow’s abstracted mid-level dynamics; validate on standard trajectories; use the identified model for control design or RL
- Assumptions/dependencies: accurate flight logs and calibration; stable low-level control on the target platform; repeatable identification maneuvers
- Education: autonomous drone racing and advanced control courses
- Sectors: higher education, vocational training, robotics bootcamps
- Tools/workflows: semester-long projects transitioning from sim to real; labs comparing first-principles vs. abstracted models, RL vs. model-based control; lightweight install via pip
- Assumptions/dependencies: course infrastructure, TA support, small drones (e.g., Crazyflie) and motion-capture or onboard state estimation for real-world phases
- CI-driven regression testing for drone firmware and controllers
- Sectors: open-source UAV firmware (Crazyflie), robotics software vendors
- Tools/workflows: integrate Crazyflow into CI to replay standard trajectories, assert controller performance across firmware changes; gradient-based diagnostics for sensitivity analyses
- Assumptions/dependencies: mapping of controller interfaces to sim; not a full HIL setup (timing and hardware drivers remain outside sim); accurate plant parameters
- Synthetic data generation for depth-based perception and policy learning
- Sectors: computer vision for robotics, autonomy R&D
- Tools/workflows: parallel batched depth rendering (MJX raycast) for training depth-policy networks and testing perception-control loops at scale
- Assumptions/dependencies: currently depth-only and non-photorealistic; higher memory footprint; image/texture realism limited compared to full renderers
- Emergency recovery policy prototyping (in-flight RL)
- Sectors: research labs, high-agility drone teams
- Tools/workflows: train stabilization policies in sub-second wall-clock, initialize from predicted takeover states, deploy to avert crashes
- Assumptions/dependencies: stringent safety interlocks and fallback controllers; fast telemetry and compute; this is a research-stage procedure and not yet suitable for safety-critical field use
- Rapid motor-level policy training (direct rotor commands)
- Sectors: robotics research, advanced control startups
- Tools/workflows: end-to-end RL that bypasses onboard PID; JIT-fused training loops for 10×–14× speed-ups over specialized C baselines; deploy to hardware after sim validation
- Assumptions/dependencies: careful guarding against unsafe actuation; accurate motor models; potential need for runtime limits on actuation during early deployment
Long-Term Applications
The paper also points to applications that require further research, scaling, integration, or certification before broad real-world deployment.
- Certified on-board, in-flight learning for fault recovery and adaptation
- Sectors: delivery, public safety, inspection, defense
- Tools/products: “self-healing” flight stack that adapts to actuator degradation, payload shifts, or partial failures using analytical gradients and fast simulation rollouts
- Assumptions/dependencies: on-board accelerators meeting power/weight constraints; rigorous V&V, runtime assurance, certification (e.g., DO-178C processes); provably safe fallback controllers and monitors
- Differentiable, photorealistic vision pipelines integrated with dynamics
- Sectors: vision-based navigation, autonomy in unstructured environments
- Tools/products: NeRF/3D Gaussian splatting fused with Crazyflow for end-to-end training of perception-control stacks; sim2real for visual policies
- Assumptions/dependencies: efficient, batched differentiable rendering; realistic sensor/lighting/weather models; large scene datasets and GPU memory optimizations
- Digital twins for fleet-scale operations and energy-aware planning
- Sectors: logistics, infrastructure inspection, energy/utilities
- Tools/products: cloud-hosted twin that unifies accurate dynamics, environment models, and fleet management; learn policies that optimize energy, throughput, and maintenance
- Assumptions/dependencies: validated energy and degradation models; environment and sensor realism; communications/networking emulation; data governance and privacy
- Swarm UTM (Uncrewed Traffic Management) and airspace policy testbeds
- Sectors: regulators, city planning, UTM service providers
- Tools/products: large-scale scenario generation and Monte Carlo stress-testing of separation minima, geofencing, contingency procedures, and spectrum policies
- Assumptions/dependencies: realistic comms and sensing stacks; adversarial/weather models; accepted validation frameworks for regulatory decision-making
- Hardware-in-the-loop and certification-grade V&V (PX4/ArduPilot/BetaFlight)
- Sectors: autopilot vendors, certification authorities, OEMs
- Tools/products: tightly timed HIL test benches with differentiable models for sensitivity and robustness analyses; coverage-guided test generation
- Assumptions/dependencies: real-time timing fidelity and I/O interfacing; integration of open-source controller stacks; traceability and evidence for compliance audits
- Automated controller auto-tuning and factory calibration
- Sectors: drone OEMs, contract manufacturers, system integrators
- Tools/products: gradient-based parameter tuning (PID/NMPC gains, mixing matrices) using plant-specific digital twins; push-button commissioning
- Assumptions/dependencies: standardized calibration rigs and short data-collection procedures; safeguards against overfitting; statistical acceptance tests
- Onboard high-rate sampling-based MPC via specialized accelerators
- Sectors: high-speed drones, defense, autonomous racing
- Tools/products: code-generated GPU/FPGA kernels for MPPI/CEM with full dynamics; robust real-time obstacle avoidance under tight latency budgets
- Assumptions/dependencies: thermal/power budgets for compute; perception integration and synchronization; extensive stress testing for stability
- Expansion beyond quadrotors to other aerial platforms (VTOL, hexacopters)
- Sectors: advanced aerial mobility, cargo drones, inspection
- Tools/products: generalized multirotor/VTOL models with identification pipelines; sector-specific controllers and training curricula
- Assumptions/dependencies: new actuation/aerodynamics models; platform-specific identification data; validation at larger scales
- Cloud-scale “Crazyflow as a Service” for large experiments
- Sectors: AI/robotics platforms, enterprise R&D, academia consortia
- Tools/products: managed clusters for massive RL/control sweeps, dataset generation, and collaborative benchmarking; APIs for experiment orchestration
- Assumptions/dependencies: multi-GPU/multi-node scaling, efficient checkpointing and logging; cost controls and SLAs; data/IP policies
- Community-standard benchmarking suites for aerial RL/control
- Sectors: academia, open-source community, industry consortia
- Tools/products: agreed-upon tasks, metrics, seeds, and reporting pipelines built atop Crazyflow for fair and reproducible comparisons
- Assumptions/dependencies: governance and maintenance; buy-in from leading labs; curation of tasks that reflect real-world difficulty
- Safety-case toolchains for certification and internal risk assessment
- Sectors: certification, insurance, enterprise safety engineering
- Tools/products: scenario libraries, coverage metrics, and automated counterexample search using differentiable simulation; reporting dashboards for auditors
- Assumptions/dependencies: model validation evidence (plant and environment); alignment with regulator-accepted methodologies; documented limits of applicability
- Energy- and emission-optimized mission planning
- Sectors: green logistics, utilities, smart cities
- Tools/products: policies and planners trained to minimize energy while meeting time windows and constraints; fleet-wide scheduling simulations
- Assumptions/dependencies: accurate battery, propulsion, and environmental models; integration with mapping/weather services; business rules and KPIs
Notes on cross-cutting dependencies and feasibility
- Compute availability: Most high-throughput gains require recent GPUs and familiarity with JAX/XLA; embedded deployment of sampling-based control or in-flight learning demands careful power/thermal budgeting.
- Model fidelity: Sim-to-real depends on accurate parameters and identification; current strongest validation is on Crazyflie family and a 660 g quad—larger platforms and different configurations will need additional identification and validation.
- Sensors and environment: Depth rendering is available; photorealistic RGB pipelines are future work. Real-world deployment of vision-heavy policies depends on more complete sensor and scene models.
- Safety and certification: Using simulation for regulated applications (e.g., BVLOS, urban airspace) requires rigorous V&V, traceability, and acceptance by authorities; current use is most appropriate for internal design, testing, and research.
- Communications and multi-agent realism: Swarm simulations at scale are supported for dynamics and control; realistic comms delays, interference, and GPS/indoor localization effects may need to be modeled for specific field deployments.
Glossary
- acados: An open-source software package for fast embedded optimal control and model predictive control. "built with acados"
- Accelerated Linear Algebra (XLA): A compiler that optimizes and fuses array computations for accelerators like GPUs/TPUs, used to speed up JAX programs. "using the Accelerated Linear Algebra (XLA) compiler"
- analytical gradients: Exact derivatives computed symbolically or via automatic differentiation, used to optimize policies or controllers efficiently. "analytical-gradient-based policy learning"
- automatic differentiation: A technique to compute exact derivatives of programs by systematically applying the chain rule to elementary operations. "leveraging automatic differentiation"
- attitude setpoints: Desired orientation commands (e.g., roll, pitch, yaw) provided to a controller. "attitude setpoints"
- backpropagation through time (BPTT): A gradient-based training method that unfolds a dynamical system across time steps to compute policy gradients. "via backpropagation through time (BPTT)"
- CasADi: A software framework for algorithmic differentiation and numerical optimization, widely used in model-based control. "symbolic form via CasADi"
- differentiable simulation: A simulator that provides gradients of outcomes with respect to inputs or parameters, enabling gradient-based learning and control. "the emergence of differentiable simulation"
- domain randomization: A technique that randomizes simulation parameters during training to improve sim-to-real transfer robustness. "without domain randomization"
- double integrators: A simplified point-mass dynamics model where acceleration is the control input and position is the double integral of acceleration. "simplified point-mass models (i.e., double integrators)"
- eager execution model: A computation mode where operations execute immediately as they are called, often causing overhead in GPU/CPU synchronization. "operate on an eager execution model"
- geometric controller: A quadrotor controller designed on the special Euclidean/orthogonal groups to track positions and orientations robustly. "We deploy the widely used geometric controller"
- GPU-accelerated: Computations sped up by running on Graphics Processing Units for high-throughput parallel workloads. "Compared to other GPU-accelerated, high-fidelity simulations"
- hardware-in-the-loop: Testing methodology where real hardware components are integrated into a simulation loop for more realistic evaluation. "software-in-the-loop or even hardware-in-the-loop evaluations"
- JAX: A high-performance numerical computing library that combines NumPy-like APIs with automatic differentiation, JIT compilation, and vectorization. "Built on JAX"
- JIT compilation: Just-in-time compilation that traces and compiles Python/numerical code into optimized machine code for faster execution. "with just-in-time (JIT) compilation"
- lazy execution: A computation strategy that defers execution until necessary, enabling tracing and fusion into optimized computation graphs. "toward lazy execution with just-in-time (JIT) compilation"
- Lissajous: A trajectory defined by sinusoidal motion in orthogonal axes with potentially different frequencies and phases. "a Lissajous in the - plane"
- MJX: A JAX-based, differentiable MuJoCo engine variant that supports compiled, parallel physics and rendering. "engines and frameworks such as MJX"
- Model Predictive Path Integral (MPPI): A sampling-based model predictive control method that evaluates many stochastic rollouts to choose control actions. "Model Predictive Path Integral (MPPI) controller"
- Nonlinear Model Predictive Controller (NMPC): An optimization-based controller that repeatedly solves a nonlinear optimal control problem over a receding horizon. "a Nonlinear Model Predictive Controller (NMPC) built with acados"
- point-mass model (PMM): A simplified dynamics model that treats the drone as a mass without rotational dynamics. "point-mass model~(PMM)"
- Proximal Policy Optimization (PPO): A popular reinforcement learning algorithm that stabilizes policy updates using clipped objectives. "Proximal Policy Optimization (PPO)"
- raycast pipeline: A rendering method that simulates depth sensing by casting rays into the scene to compute intersections. "MJX's raycast pipeline"
- rigid-body model: A physical model that accounts for full 6-DoF rigid-body dynamics of the drone, including rotational motion. "idealized rigid-body drone models"
- sim-to-real gap: The discrepancy between simulation results and real-world performance, often measured as an error metric. "The sim-to-real gap is computed as the root-mean-squared distance"
- software-in-the-loop: A testing setup where the actual control software runs within a simulated environment prior to hardware deployment. "software-in-the-loop or even hardware-in-the-loop evaluations"
- SO(3): The Lie group of 3D rotations, often used to represent and control drone orientation. "questions about action representations"
- system identification pipeline: A procedure to fit model parameters from data so the simulator matches a specific drone’s behavior. "providing a light-weight system identification pipeline"
- tensorized physics: Physics computations structured as batched tensor operations to exploit GPU parallelism. "via tensorized physics"
- thrust curves: Empirical or modeled relationships mapping rotor speeds to generated thrust forces and torques. "via thrust curves"
- vectorization: The process of expressing computations over arrays to run many simulations or agents in parallel efficiently. "The combination of JIT compilation and vectorization allows Crazyflow to scale efficiently"
Collections
Sign up for free to add this paper to one or more collections.