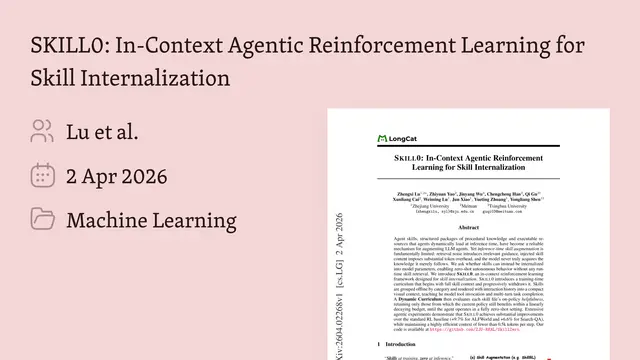
OpenClaw-RL: Train Any Agent Simply by Talking
OpenClaw-RL introduces a unified framework that transforms every user interaction into a learning signal for AI agents. By exploiting next-state feedback—such as user replies, tool outputs, or test results—the system enables continuous, live optimization of both personal and general agents across conversational, terminal, GUI, and software engineering environments. Through asynchronous infrastructure and hybrid learning from evaluative rewards and directive corrections, OpenClaw-RL achieves dramatic personalization improvements and scalable agent training without disrupting real-time serving.Script
Every time an AI agent acts—whether it's replying to your message, executing a terminal command, or submitting code—the next thing that happens carries a signal. A user's follow-up, a test result, a GUI state change. These signals encode both quality and correction, yet most reinforcement learning systems ignore them during live deployment. OpenClaw-RL changes that by turning every interaction into a training opportunity.
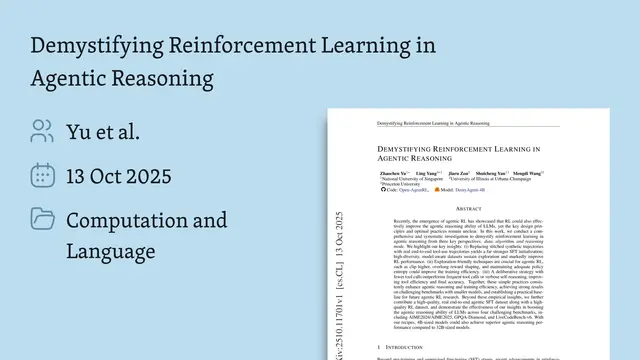
Traditional reinforcement learning for language model agents depends on datasets collected in advance—static snapshots that can't adapt as users and tasks evolve. But every deployed agent already generates next-state signals: the environment's response to each action. OpenClaw-RL systematically captures and learns from these signals in real time, spanning conversational assistants, terminal agents, graphical interfaces, and software engineering tasks.
How does the system maintain live learning without sacrificing response speed?
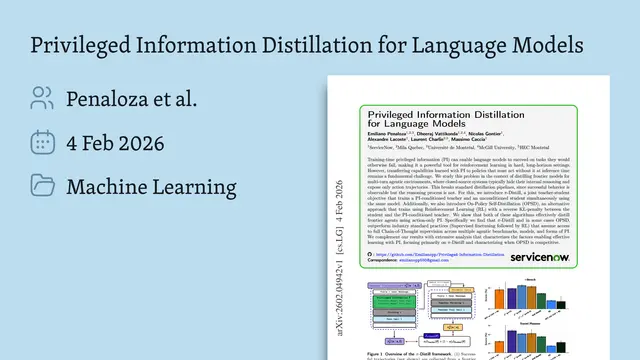
OpenClaw-RL runs four independent, non-blocking components: environment hosting, reward computation via a process reward model judge, policy training, and policy serving. Personal agents live on individual devices and connect securely to the central server, while general agents execute in parallel cloud environments. This decoupling eliminates inference bottlenecks, allowing the system to refine policies continuously without delaying user-facing responses.
The framework learns in two ways. Binary reinforcement learning translates next-state signals into dense process rewards—plus 1, 0, or minus 1—using a judge model, enabling credit assignment even in long tasks. When the environment provides directive feedback—explicit hints on how to improve—OpenClaw extracts that guidance and applies on-policy distillation, supervising the agent at the token level. Combining both methods drives personalization scores from 0.17 to 0.81 in just 36 student interactions and 24 teacher interactions.
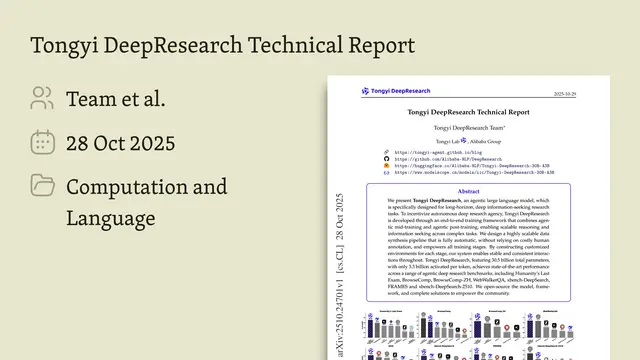
This result captures the system's defining property: you optimize your agent simply by using it. In simulation, the policy adapts continuously as interactions accumulate, with no need for separate training sessions or manual dataset curation. The agent learns your preferences and task requirements in real time, session by session, purely from the signals your natural usage generates.
OpenClaw-RL reframes online reinforcement learning as a live, continuous process embedded in every interaction. By exploiting the next-state signals already present in deployed agents, it unifies personalization and general training within a single scalable infrastructure. To explore how you can generate your own AI research videos and learn more about cutting-edge work like this, visit EmergentMind.com.