- The paper's main contribution is a decentralized MPC framework that integrates convexified potential field constraints for effective obstacle avoidance.
- It employs methods like the Swivelling Robot Destination, Approach Angle, and Tangential Band to overcome local minima challenges in both dynamic and static environments.
- Simulation results in a Gazebo+ROS environment demonstrate improved convergence time and robust collision avoidance in multi-robot target tracking scenarios.
Decentralized MPC-Based Obstacle Avoidance in Multi-Robot Systems for Target Tracking
This essay provides a detailed breakdown of the paper "Decentralized MPC-based Obstacle Avoidance for Multi-Robot Target Tracking Scenarios" (1805.09633). The paper introduces a decentralized model predictive control (MPC) algorithm designed for obstacle avoidance in dynamic multi-robot target tracking scenarios. The focus is on embedding nonlinear potential field functions within a convex optimization framework to handle obstacle avoidance in an efficient manner.
Background and Objectives
The primary objective of this research is to develop a decentralized control framework for multi-robot systems that facilitates target tracking while effectively avoiding static and dynamic obstacles. The core challenge is to integrate obstacle avoidance within the model predictive control framework through a convex optimization approach, thereby improving computational efficiency compared to traditional non-convex methods.
The method aims at:
- Avoiding collision between robots and with environmental obstacles.
- Guaranteeing obstacle avoidance by modeling obstacle forces as external inputs.
- Solving the field local minima problems associated with potential field functions.
Methodology
Decentralized Model Predictive Control (MPC)
The proposed approach utilizes a model predictive control framework where each robot independently computes its motion trajectory to avoid obstacles and maintain target tracking. The MPC is formulated as a quadratic program, ensuring convexity by precomputing potential field forces.
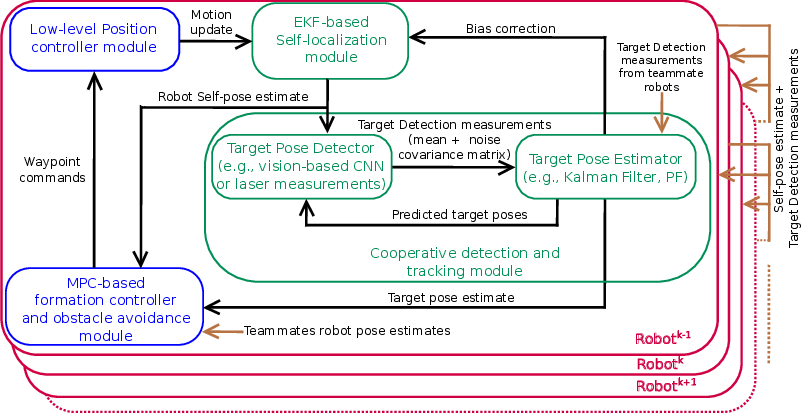
Figure 1: General modules involved in multi-robot target tracking. Our work focuses on the modules highlighted in blue.
Convex Optimization with Potential Fields
The novelty lies in convexifying the potential field constraints by precomputing them as external forces within the robot dynamics. This allows the system to remain convex, thereby significantly reducing computational complexity while guaranteeing obstacle avoidance.
The optimization objective function is given by:
$J_{\mathrm{DQMPC} = \sum_{n=0}^{N} \bm{\Omega_{i} (u_t^{R_k}(n)+\mathbf{f}_{t}^{R_k}(n)+\bm{g})^2 + \bm{\Omega_{t}} \big((x_t^{R_k}(N+1)^{\top}, \dot{x}_t^{R_k}(N+1)^{\top}) - (_t^{R_k})^{\top} \big)^2 }$
The approach includes constraint handling using precomputed forces, ensuring that once a feasible solution is determined, avoidance of static and dynamic obstacles is secured.
Resolving Field Local Minima
Addressing the field local minima and control deadlock issues that are common in potential field applications, the paper proposes three distinct approaches:
- Swivelling Robot Destination (SRD) Method: Adjusts the robot destination based on the gradient of the optimization objective, enabling efficient escape from local minima.
- Approach Angle Method: Utilizes additional potential forces based on the approach angle between robots and obstacles.
- Tangential Band Method: Establishes a tangential force field around obstacles, ensuring robots navigate dynamically around complex or occluding static environments.
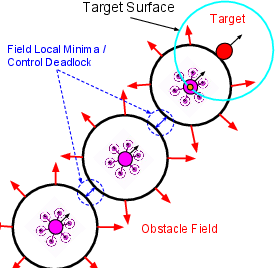
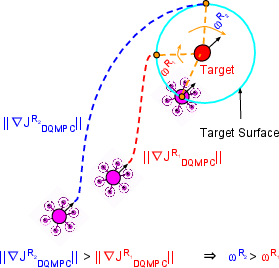
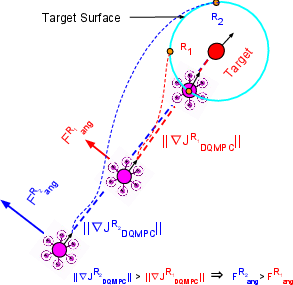
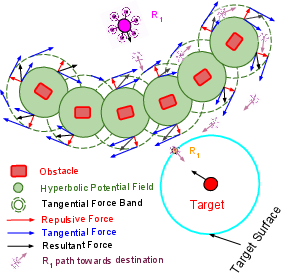
Figure 2: Field local minima problem.
Simulation and Results
The paper presents extensive simulations executed within a Gazebo+ROS environment, demonstrating the efficacy of the proposed methodologies across various scenarios — including dense obstacle fields and dynamic environments.
Performance comparisons with baseline DQMPC indicate significant improvement in convergence time due to the proposed methodologies. Specifically, the swivelling method and approach angle method show notable reductions in convergence time for dynamic scenarios, while the tangential band method is effective in resolving complex static obstacle configurations.
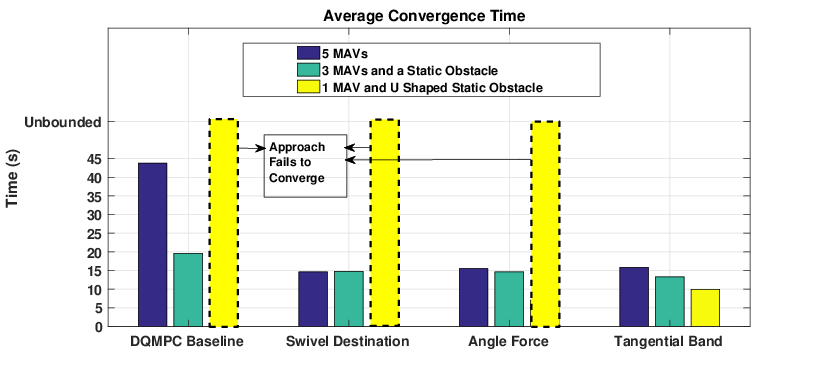
Figure 3: Average convergence time comparison.
Conclusion
The paper successfully demonstrates a robust decentralized control approach for multi-robot systems, focusing on target tracking and obstacle avoidance through convex optimization techniques. The research's significant contribution lies in overcoming computational and operational limitations of potential field methodologies by embedding them within a convex MPC structure.
Future work aims to extend the approach to diverse robot platforms and further validate the methodology within physical robotic experimentation to ensure real-world applicability and performance fidelity.