- The paper introduces a dual-mode framework that integrates arc-based motion with MPC to guarantee convergence.
- It employs an optimization-based strategy combining DWA and MPC to compute real-time safe motion trajectories adhering to dynamic constraints.
- Experiments on IRobot Magellan-pro and two-wheeled inverted pendulum models demonstrate efficient navigation at up to 80% of top speed.
Dual-mode Dynamic Window Approach to Robot Navigation with Convergence Guarantees
This essay provides an in-depth technical analysis of the "Dual-mode Dynamic Window Approach to Robot Navigation with Convergence Guarantees," a paper that integrates dynamic window approaches (DWA) with model predictive control (MPC) to address robot navigation challenges. The approach allows robots to navigate unknown environments with dynamic constraints while ensuring convergence to a goal location.
Introduction to the Proposed Framework
The paper introduces a dual-mode MPC framework that enhances the classical DWA by integrating it with a generic path-planner within an MPC structure. This dual-mode framework operates with two modes: arc-based motion for usual navigation and reference tracking for goal convergence. The delineation of arc-based motions leverages the robot's kinematic constraints, ensuring swift navigation. Convergence to the goal is assured through reference tracking, solving the DWA's issue with local minima and lack of convergence guarantees.
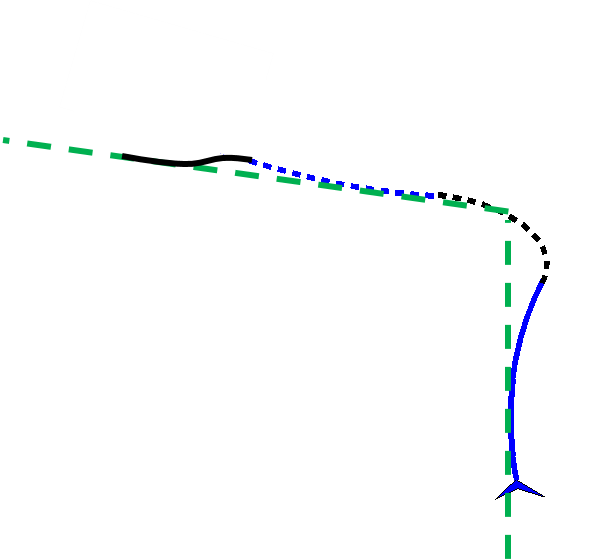
Figure 1: Example of a dual-mode arc-based trajectory with a robot following a planned path consisting of arc-based controllers and a reference trajectory.
Theoretical Foundations
The theoretical novelty lies in combining MPC's stabilization capabilities with arc-based motion primitives. The approach can compute control trajectories by optimizing over a finite-dimensional parameter space rather than solving extensive control problems.
Dynamic Window Approach (DWA)
DWA selects feasible motion arcs based on criteria that balance progression towards a target and collision avoidance. The trajectories are computed in real-time, allowing robots to navigate swiftly without extensive computations. However, DWA alone does not guarantee goal convergence.
Incorporation of MPC
The paper extends DWA's capabilities by including an MPC framework that uses terminal cost functions and constraints to ensure convergence. The algorithm alternates between optimizing arc-based movements and stabilizing control laws, yielding a computationally efficient solution that respects dynamic constraints.
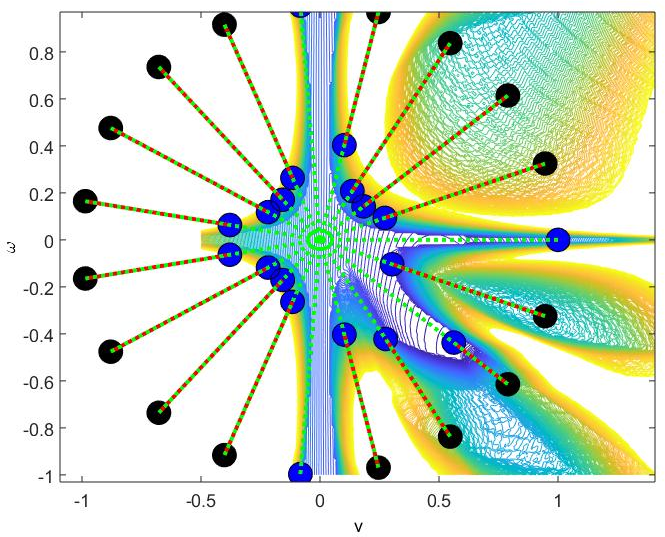
Figure 2: Efficacy of arc scaling in maintaining collision-free paths with visual comparisons before and after trajectory modifications.
Implementation Details
Control Laws
The reference tracking is facilitated by transforming the robot's position control problem into a velocity control using an approximate epsilon-diffeomorphism. This allows the system to employ feedback controllers that stabilize the robot around desired trajectories, respecting acceleration constraints.
Cost and Optimization
The cost function integrates a termination barrier and collision avoidance penalties, effectively guiding the robot via safe paths and ensuring adherence to physical constraints. Initialization strategies leverage predefined behaviors to expedite computation.
Case Studies and Results
IRobot Magellan-pro
The framework was implemented on an IRobot Magellan-pro, demonstrating computational efficiency and the ability to operate at high velocities within constrained environments. The robot maintained 80% of its top speed while traversing complex corridors, thereby validating the dual-mode arc-based approach in real-time robotic navigation scenarios.

Figure 3: Image of the IRobot Magellan-pro utilized in experimental validation of the proposed algorithm.
Two-Wheeled Inverted Pendulum
For the inverted pendulum model, the framework accounted for tilt dynamics and stabilization constraints. This highlights the algorithm's flexibility in addressing various dynamic constraints, maintaining balance, and successfully navigating through a multifaceted landscape.
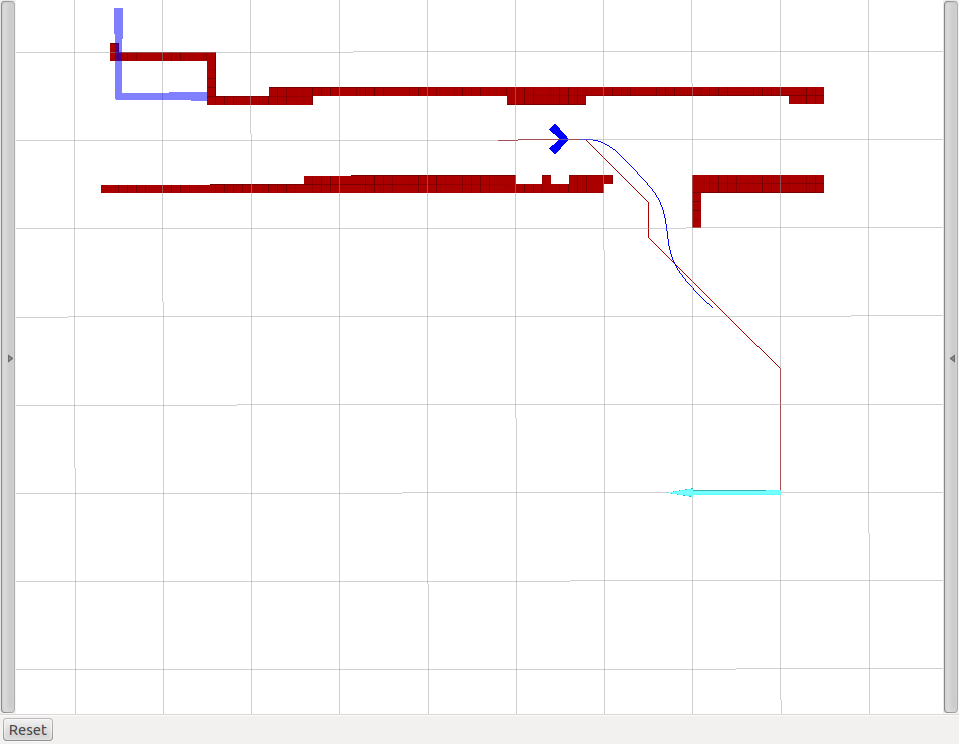
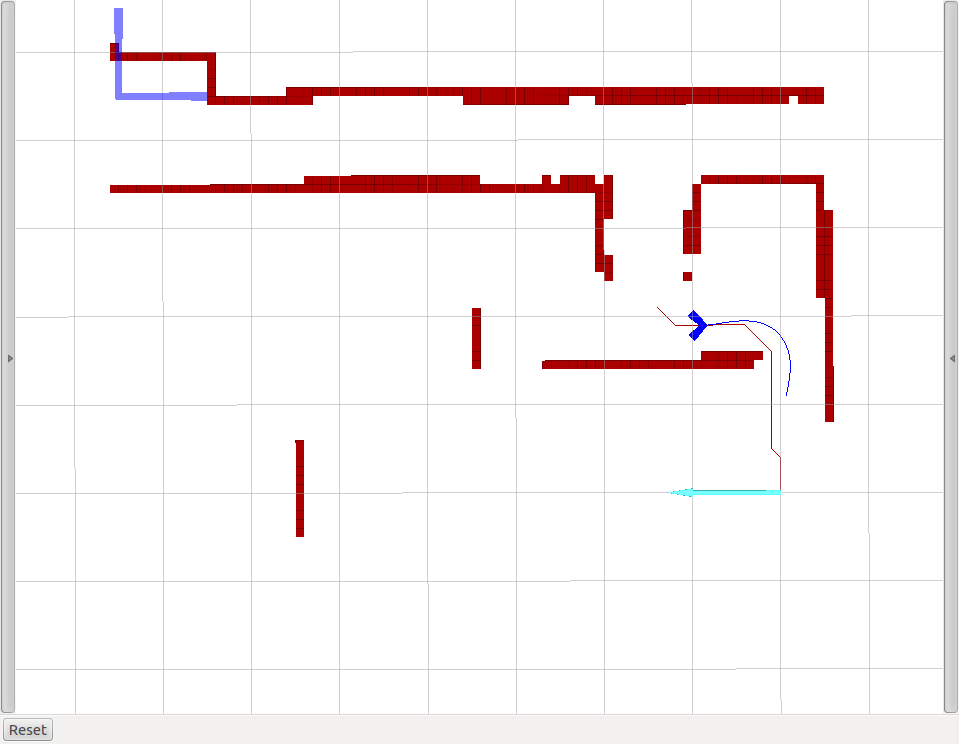
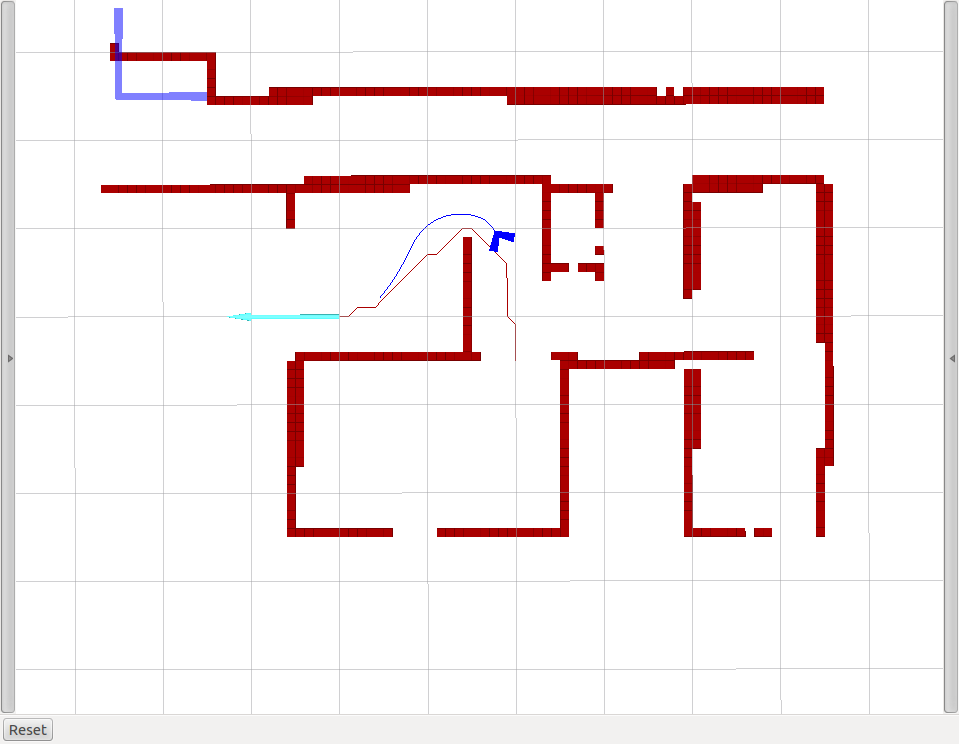
Figure 4: Executed path and state snapshots during navigation of an inverted pendulum robot through a complex environment.
Conclusion
The proposed dual-mode dynamic window approach effectively combines the real-time adaptability of DWA with the convergence guarantees of MPC. The algorithm showcases meaningful advancements in navigation of robots through unknown and dynamically constrained environments, proving integral for applications like autonomous vehicle navigation and field robotics. Future developments will focus on optimizing the arc-based method's computational efficiency and expanding its applicability across a broader range of robotic systems.