- The paper presents an integrated framework using MPC for AVs and conventional signals for HVs, ensuring collision avoidance at intersections.
- It models vehicles with a unicycle kinematic approach, highlighting the dynamic differences between human-driven and autonomous vehicles.
- The coordinated management system synchronizes permission assignments and traffic light controls to enhance safety and throughput.
Safe Intersection Management for Mixed Traffic Systems: An Analytical Overview
Introduction
The paper "Safe Intersection Management for Mixed Transportation Systems with Human-Driven and Autonomous Vehicles" (1808.06632) offers a comprehensive framework for intersection management amid the coexistence of human-driven vehicles (HVs) and autonomous vehicles (AVs). It recognizes the transition required from a predominantly HV environment to one possibly dominated by AVs, necessitating interim solutions that accommodate both vehicle types.
Intersection and Vehicle Modeling
Effective management of intersections with mixed traffic involves understanding the distinct characteristics of HVs and AVs. HVs have considerable freedom in control and speed but suffer from limited braking capabilities and lack of communication infrastructure. Conversely, AVs possess model predictive control (MPC) capabilities and robust communication systems, enabling swift decision-making and adherence to tighter constraints.
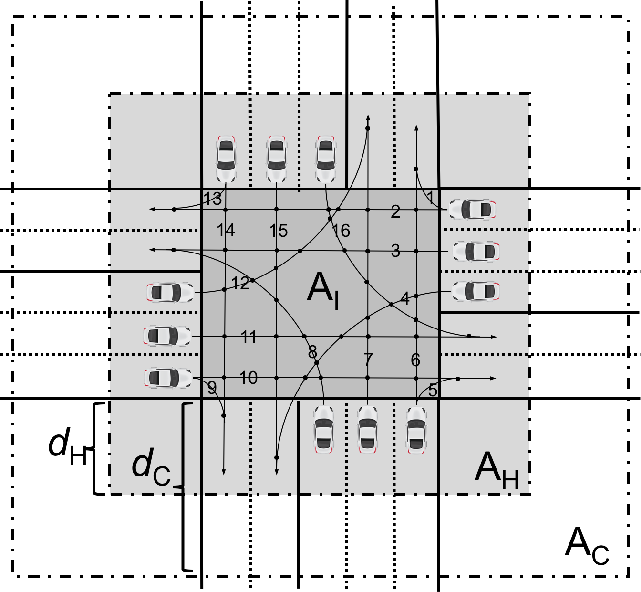
Figure 1: General intersection scenario with crossing, merging, and non-conflicting paths.
The paper introduces an intuitive intersection model that incorporates conflict points and collision areas, ensuring that vehicles on intersecting paths do not simultaneously occupy the same space. The modeling of vehicles employs a unicycle kinematic pattern with defined constraints highlighting the difference in dynamic responses between HVs and AVs.
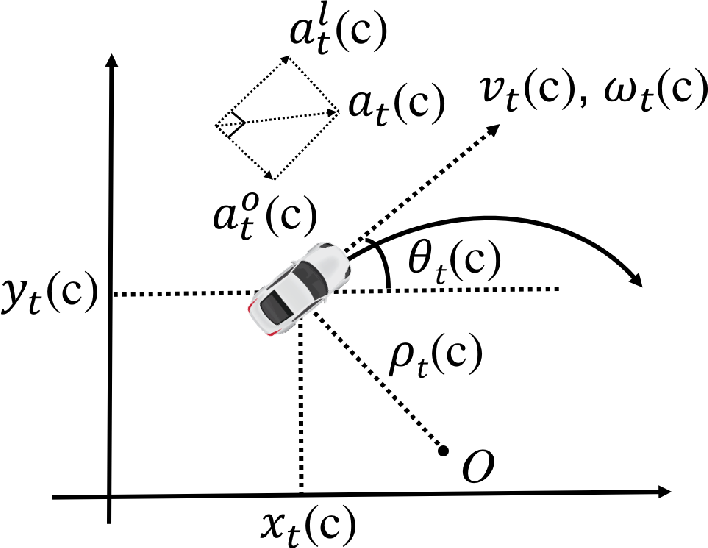
Figure 2: Illustration of the unicycle kinematic model for vehicle c. The solid curve depicts the trajectory of the vehicle.
Integration of Intersection Management Protocols
At the heart of this framework lies an intersection manager (IM) system interfacing with an intersection signal light controller (ISL). Through permission assignment policies for AVs and simple rulings for HVs, the system endeavors to maximize safety and throughput. AVs utilize vehicle-to-infrastructure (V2I) communication for intersection access permissions, whereas HVs depend on traditional traffic lights.
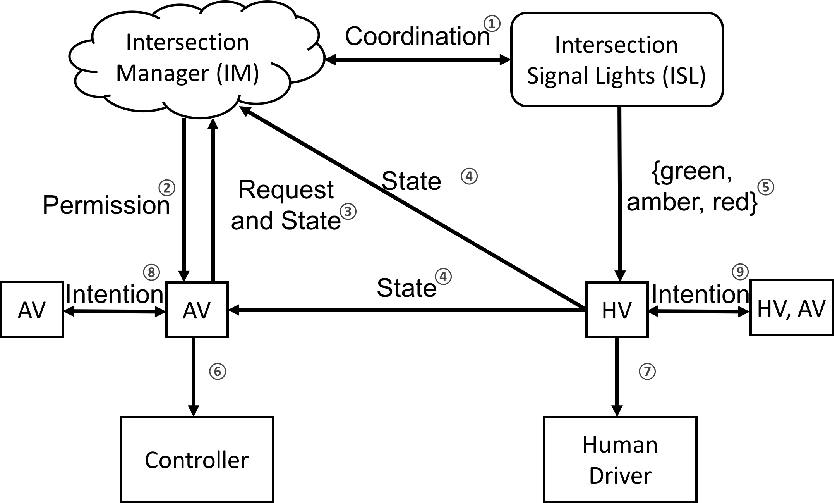
Figure 3: Architecture of intersection management for mixed traffic.
For AVs, the application of MPC within designated areas is emphasized, governed by safety protocols ensuring adaptive velocity control that accounts for HV behavior. The safety guarantees provided by the protocols are substantiated through well-defined constraints.
Traffic Signal Coordination and Protocol Development
Effective coordination between IM and ISL is critical, particularly in facilitating unambiguous instructions to both AVs and HVs. The signal operation policy cyclically changes traffic light states while respecting road safety and vehicle dynamics constraints. This ensures that HVs enter intersections with clear directives aligned with current human driving practices.
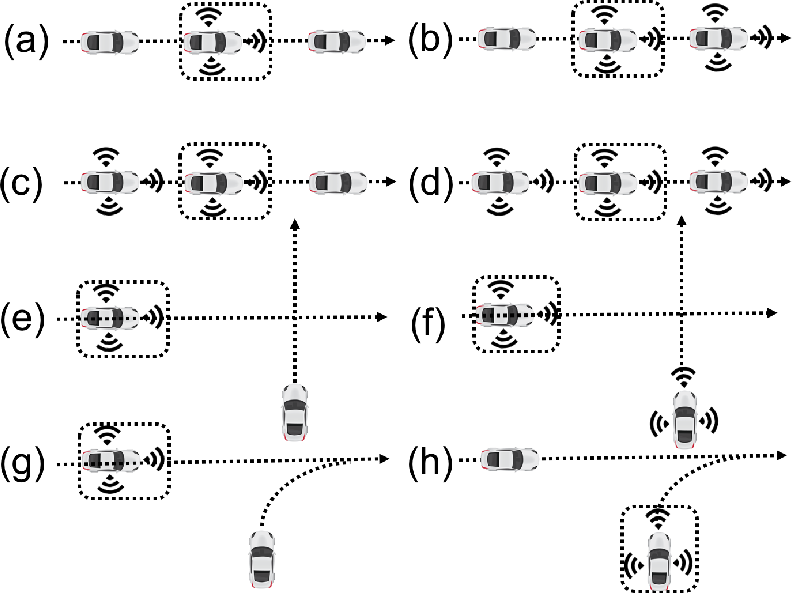
Figure 4: Multiple traffic scenarios. An AV is represented by an icon with a WiFi symbol. The vehicle with a dashed square is "own vehicle" whose viewpoint and behavior are discussed in the test.
The protocol development accounts for vehicle type differences through a comprehensive set of rules for HVs and a motion protocol for AVs. Coordination strategies involve utilizing vehicle state data to enhance signaling operations and mitigate uncertainties arising from HV misinterpretations of traffic light commands.
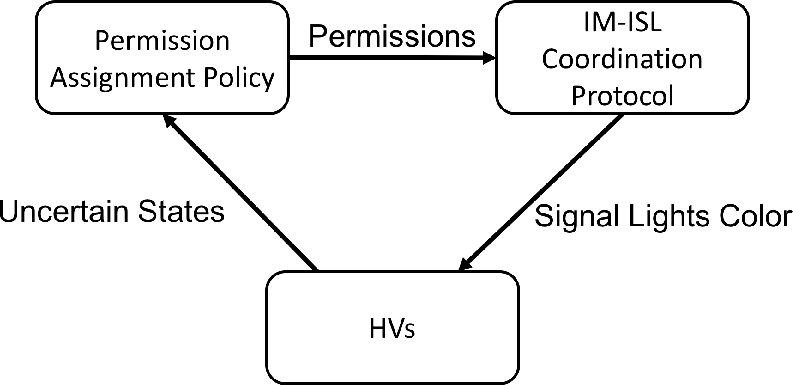
Figure 5: Information flow between permission assignment and signal color determination.
Conclusion
The paper adeptly addresses the intricate challenges of managing mixed traffic intersections, offering a robust strategy that leverages both conventional and advanced communication channels and vehicle technologies. It successfully models and integrates varying vehicular dynamics into a cohesive management framework, crucial for transitioning towards more autonomous transportation systems. Further exploration is warranted in broader contexts where heterogeneous levels of vehicular autonomy are present, buoyed by enhanced sensing capabilities and adaptive control mechanisms.