- The paper introduces HOWM, a novel approach that uses action attention and slot-based binding to enhance compositional generalization in object-oriented settings.
- It formalizes compositional generalization via an algebraic framework using MDP homomorphisms to bind objects and reduce computational load through dynamic latent alignment.
- Experimental results in environments like Rush Hour reveal improved prediction accuracy and resource efficiency, indicating strong potential for scalable reinforcement learning.
"Toward Compositional Generalization in Object-Oriented World Modeling" Essay
Introduction
The paper "Toward Compositional Generalization in Object-Oriented World Modeling" (2204.13661) investigates the potential for achieving compositional generalization within object-oriented environments, a crucial aspect of learning that allows models and agents to predict and make decisions in novel scenarios by recognizing familiar components from training. The study extends the concept of compositional generalization commonly explored in natural language processing to object-based environments in reinforcement learning, aiming to formalize and measure it using a new framework and sample environments.
Object Library and Compositional Generalization
This research introduces the Object Library, a set of object-oriented environments specifically designed to assess compositional generalization. Each environment features K objects pulled from a pool of N total objects, where K remains constant throughout an episode. These environments serve as testing grounds for the model's ability to apply learned concepts to new combinations of known objects, which are visually distinct but structurally isomorphic.
By formalizing compositional generalization, the paper defines it as the ability to generalize effects of objects across varied scenes while maintaining invariant predictions of the transition model. The authors propose Homomorphic Object-oriented World Model (HOWM), a differentiable approach leveraging action attention to facilitate soft compositional generalization (Figure 1).
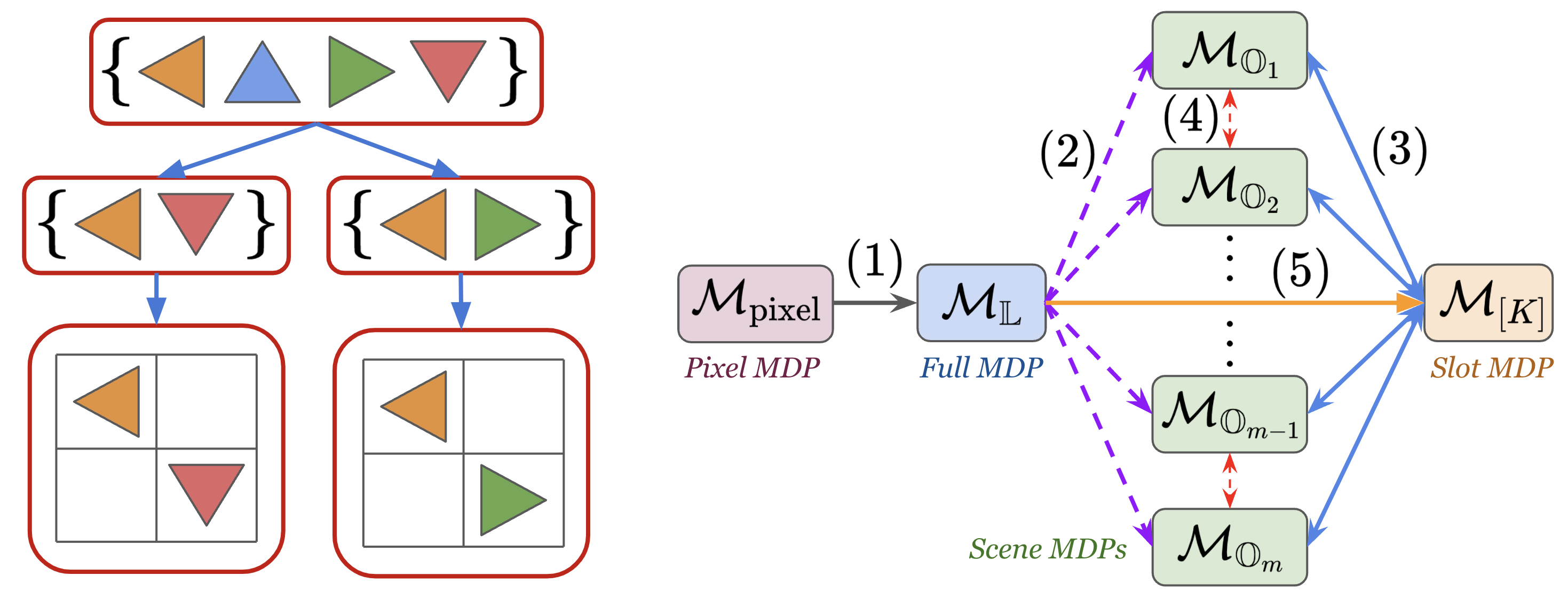
Figure 1: An example of our Object Library environment: Rush Hour, showcasing interactions with dynamic object combinations.
The paper develops an algebraic framework using MDP homomorphisms, enabling the binding of objects across different object-oriented environments to their representative slots. Through permutation groups, the symmetry in object replacements provides a practical structure for exploring equivalence in transition functions under homomorphic mappings (Figure 2). This symmetry facilitates predicting and planning in novel scenes, as demonstrated with the Rush Hour environment.
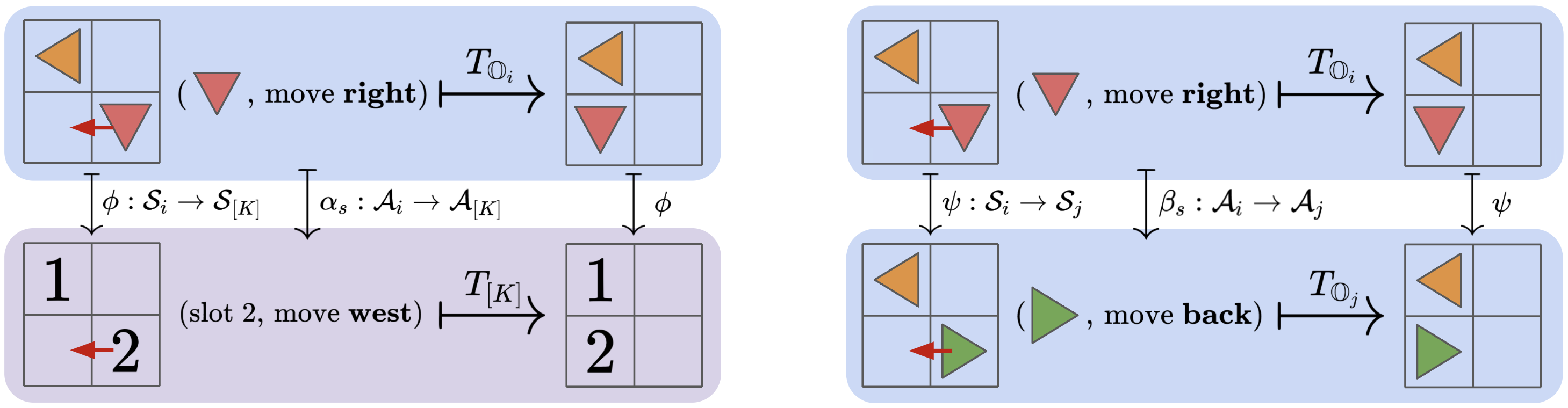
Figure 2: An illustrative commutative diagram showing symmetry in object replacement across scenes.
Methodology
The research distinguishes between exact and soft compositional generalization methods, recognizing the computational limitations and resource demands of maintaining a full representation of all object permutations. The HOWM approach centers on learning object and action binding in latent spaces to achieve efficient generalization. It employs slot-based mechanisms and aligns latent sequences across different observations while handling background dynamics using an additional slot.
In practice, HOWM's ability to align actions and slots dynamically significantly reduces dimensionality, outperforming exhaustive compositions in both accuracy and resource usage (Figure 3). Using aligned loss, it mitigates binding noise and enhances transition predictability across tested environments.
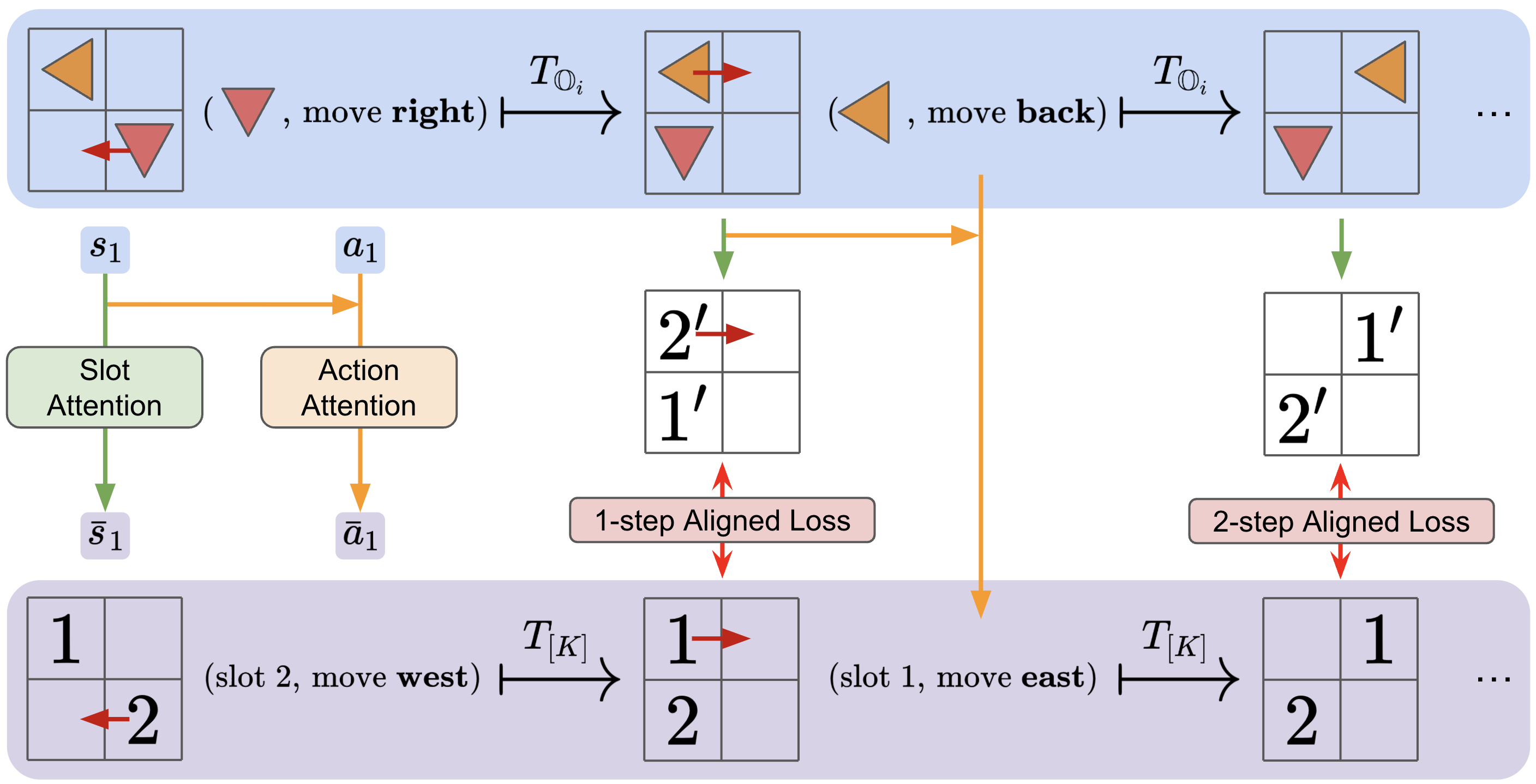
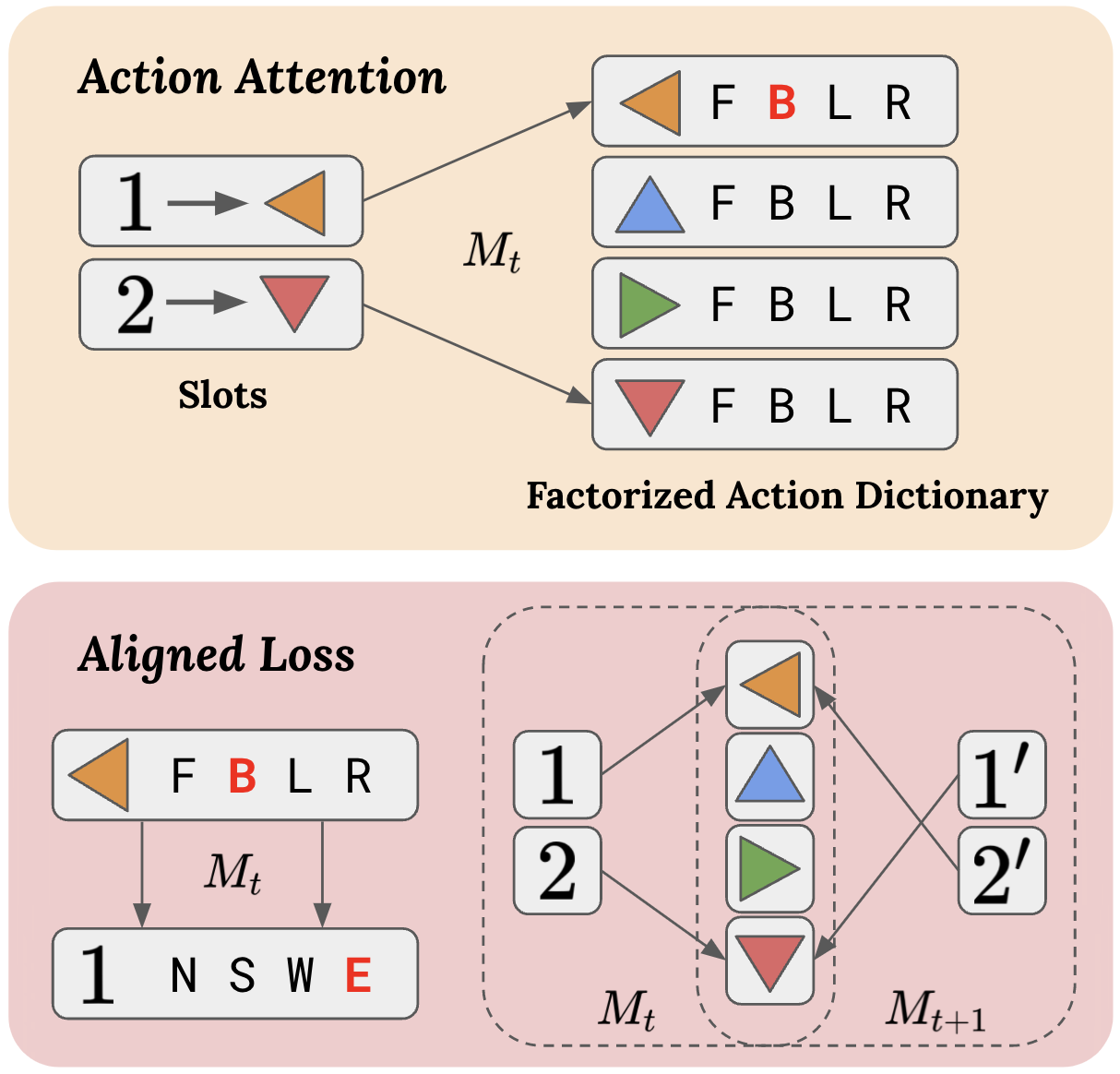
Figure 3: Overview of world model prediction showing equivariance in slot ordering and progressive alignment methods.
Experimental Validation
Results from the experiments validate the theoretical constructs, demonstrating HOWM's ability to generalize within significantly reduced constraints compared to traditional, exact compositional methods. The methods reveal the importance of dynamic slot-based MDP representation, showing strong alignment capabilities even in environments with complex actions, such as Rush Hour (Figure 4). This generalization is quantified through metrics like Mean Reciprocal Rank which reflect model scaling potential and robustness in unseen object compositions.
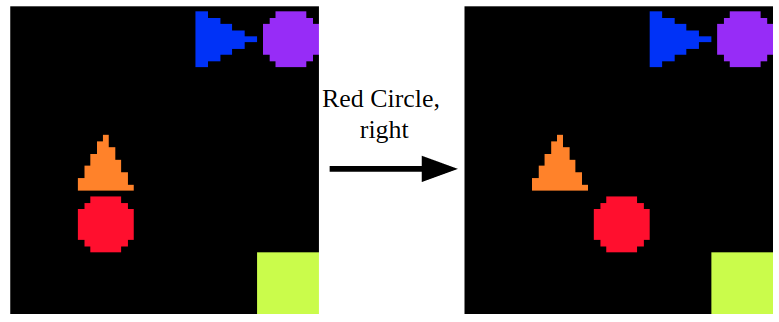
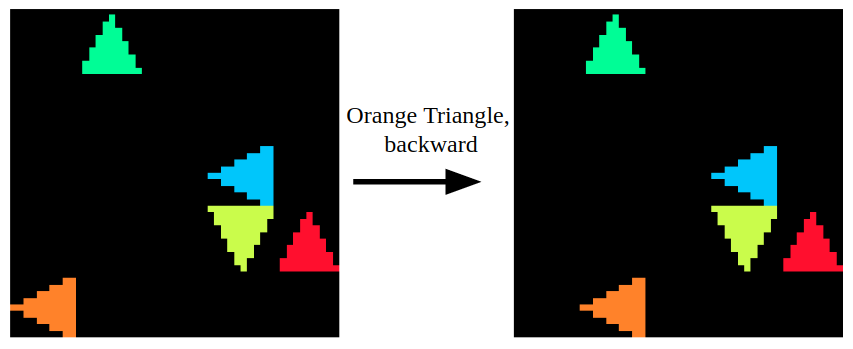
Figure 4: Example transitions of Shapes and Rush Hour environment, illustrating compositional prediction accuracy.
Implications and Future Work
This study opens avenues for extending compositional generalization to complex reinforcement learning environments by leveraging object-oriented representations. The framework and experimental findings suggest pathways for integrating symmetry-driven learning to broader domains, such as robotics and dynamic scene understanding. Future work involves refining binding mechanisms, reducing the gap between representation and real-world planning effectiveness, and exploring multi-faceted compositions beyond single object classes.
Conclusion
The paper successfully elucidates the principles underlying compositional generalization in object-oriented environments and establishes a novel, resource-efficient approach through HOWM. By formalizing object symmetry and leveraging algebraic homomorphisms, it paves the way for scalable, generalizable world modeling with a focus on action-oriented slot binding, offering significant contributions to the field of reinforcement learning and AI.