Sampling-based Model Predictive Control Leveraging Parallelizable Physics Simulations
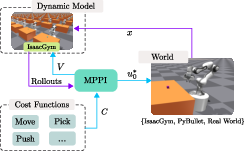
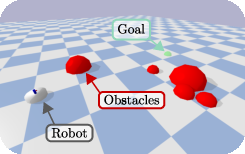
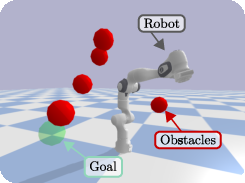
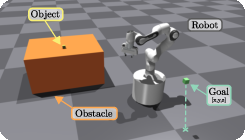
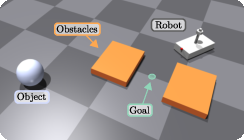
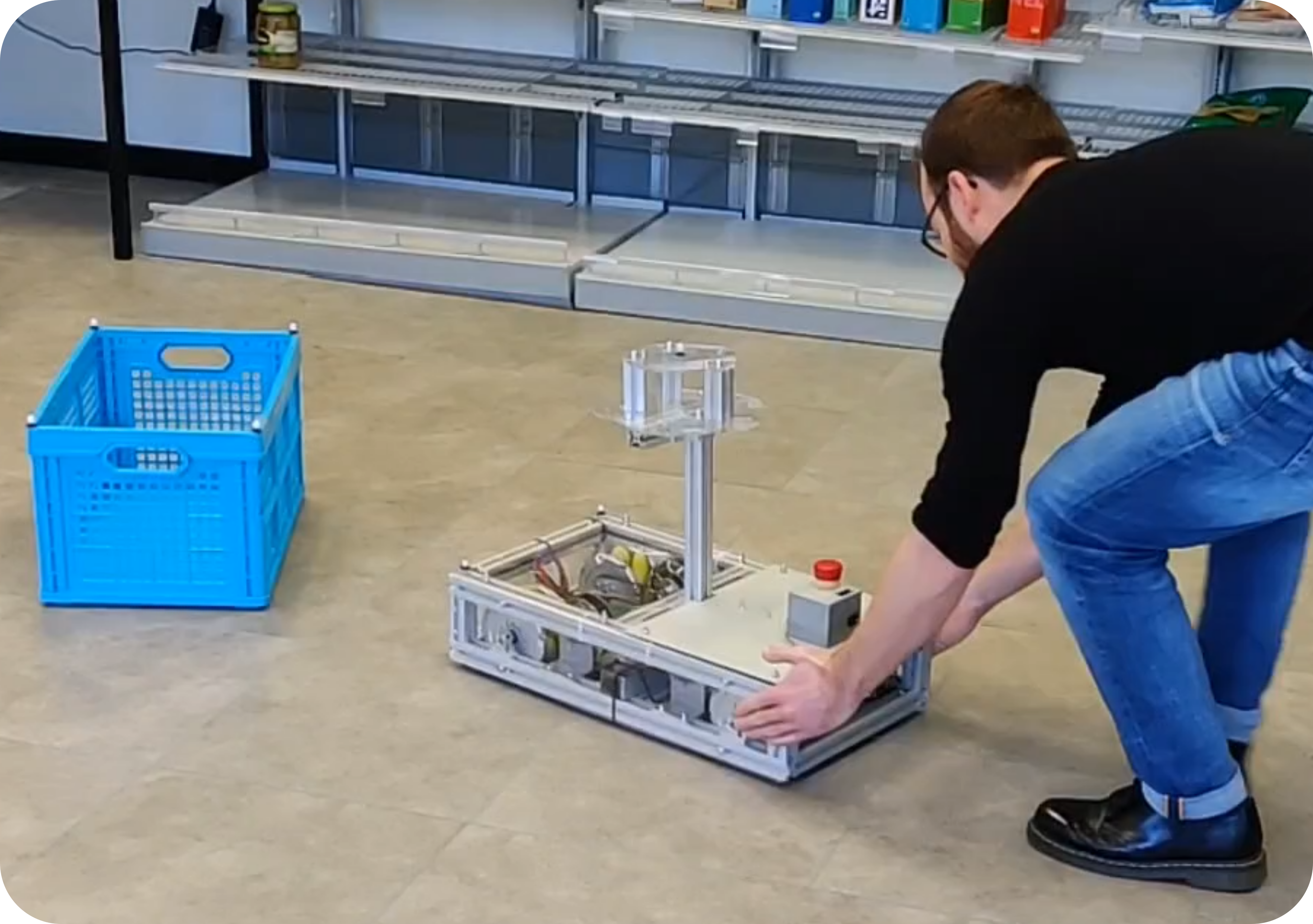
Abstract: We present a method for sampling-based model predictive control that makes use of a generic physics simulator as the dynamical model. In particular, we propose a Model Predictive Path Integral controller (MPPI), that uses the GPU-parallelizable IsaacGym simulator to compute the forward dynamics of a problem. By doing so, we eliminate the need for explicit encoding of robot dynamics and contacts with objects for MPPI. Since no explicit dynamic modeling is required, our method is easily extendable to different objects and robots and allows one to solve complex navigation and contact-rich tasks. We demonstrate the effectiveness of this method in several simulated and real-world settings, among which mobile navigation with collision avoidance, non-prehensile manipulation, and whole-body control for high-dimensional configuration spaces. This method is a powerful and accessible open-source tool to solve a large variety of contact-rich motion planning tasks.
- O. M. Andrychowicz, B. Baker, M. Chociej, R. Józefowicz, B. McGrew, J. Pachocki, A. Petron, M. Plappert, G. Powell, A. Ray, J. Schneider, S. Sidor, J. Tobin, P. Welinder, L. Weng, and W. Zaremba, “Learning dexterous in-hand manipulation,” The International Journal of Robotics Research, vol. 39, no. 1, pp. 3–20, Jan. 2020.
- M. Schwenzer, M. Ay, T. Bergs, and D. Abel, “Review on model predictive control: an engineering perspective,” The International Journal of Advanced Manufacturing Technology, vol. 117, no. 5, pp. 1327–1349, Nov. 2021.
- F. R. Hogan and A. Rodriguez, “Reactive planar non-prehensile manipulation with hybrid model predictive control,” The International Journal of Robotics Research, vol. 39, no. 7, pp. 755–773, Jun. 2020.
- J. Moura, T. Stouraitis, and S. Vijayakumar, “Non-prehensile Planar Manipulation via Trajectory Optimization with Complementarity Constraints,” in 2022 International Conference on Robotics and Automation (ICRA). Philadelphia, PA, USA: IEEE, May 2022, pp. 970–976.
- N. Mansard, A. DelPrete, M. Geisert, S. Tonneau, and O. Stasse, “Using a Memory of Motion to Efficiently Warm-Start a Nonlinear Predictive Controller,” in 2018 IEEE International Conference on Robotics and Automation (ICRA). Brisbane: IEEE, May 2018, pp. 2986–2993.
- T. S. Lembono, A. Paolillo, E. Pignat, and S. Calinon, “Memory of Motion for Warm-Starting Trajectory Optimization,” IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 2594–2601, Apr. 2020.
- G. Williams, A. Aldrich, and E. A. Theodorou, “Model Predictive Path Integral Control: From Theory to Parallel Computation,” Journal of Guidance, Control, and Dynamics, vol. 40, no. 2, pp. 344–357, Feb. 2017.
- G. Williams, P. Drews, B. Goldfain, J. M. Rehg, and E. A. Theodorou, “Information-Theoretic Model Predictive Control: Theory and Applications to Autonomous Driving,” IEEE Transactions on Robotics, vol. 34, no. 6, pp. 1603–1622, Dec. 2018.
- V. Makoviychuk, L. Wawrzyniak, Y. Guo, M. Lu, K. Storey, M. Macklin, D. Hoeller, N. Rudin, A. Allshire, A. Handa, and G. State, “Isaac Gym: High Performance GPU Based Physics Simulation For Robot Learning,” in Proceedings of the Neural Information Processing Systems Track on Datasets and Benchmarks, J. Vanschoren and S. Yeung, Eds., vol. 1. Curran, 2021.
- A. Li, M. Mukadam, M. Egerstedt, and B. Boots, “Multi-objective Policy Generation for Multi-robot Systems Using Riemannian Motion Policies,” in Robotics Research, ser. Springer Proceedings in Advanced Robotics, T. Asfour, E. Yoshida, J. Park, H. Christensen, and O. Khatib, Eds. Cham: Springer International Publishing, 2022, pp. 258–274.
- N. D. Ratliff, K. Van Wyk, M. Xie, A. Li, and M. A. Rana, “Generalized Nonlinear and Finsler Geometry for Robotics,” in 2021 IEEE International Conference on Robotics and Automation (ICRA). Xi’an, China: IEEE, May 2021, pp. 10 206–10 212.
- M. Spahn, M. Wisse, and J. Alonso-Mora, “Dynamic Optimization Fabrics for Motion Generation,” IEEE Transactions on Robotics, pp. 1–16, 2023.
- G. Buizza Avanzini, A. M. Zanchettin, and P. Rocco, “Constrained model predictive control for mobile robotic manipulators,” Robotica, vol. 36, no. 1, pp. 19–38, Jan. 2018.
- L. Hewing, K. P. Wabersich, M. Menner, and M. N. Zeilinger, “Learning-Based Model Predictive Control: Toward Safe Learning in Control,” Annual Review of Control, Robotics, and Autonomous Systems, vol. 3, no. 1, pp. 269–296, May 2020.
- M. Bhardwaj, B. Sundaralingam, A. Mousavian, N. D. Ratliff, D. Fox, F. Ramos, and B. Boots, “STORM: An Integrated Framework for Fast Joint-Space Model-Predictive Control for Reactive Manipulation,” in Proceedings of the 5th Conference on Robot Learning. PMLR, Jan. 2022, pp. 750–759.
- M. Danielczuk, A. Mousavian, C. Eppner, and D. Fox, “Object Rearrangement Using Learned Implicit Collision Functions,” in 2021 IEEE International Conference on Robotics and Automation (ICRA). Xi’an, China: IEEE, May 2021, pp. 6010–6017.
- I. Abraham, A. Handa, N. Ratliff, K. Lowrey, T. D. Murphey, and D. Fox, “Model-Based Generalization Under Parameter Uncertainty Using Path Integral Control,” IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 2864–2871, Apr. 2020.
- J. Carius, R. Ranftl, F. Farshidian, and M. Hutter, “Constrained stochastic optimal control with learned importance sampling: A path integral approach,” The International Journal of Robotics Research, vol. 41, no. 2, pp. 189–209, Feb. 2022.
- T. Howell, N. Gileadi, S. Tunyasuvunakool, K. Zakka, T. Erez, and Y. Tassa, “Predictive Sampling: Real-time Behaviour Synthesis with MuJoCo,” 2022.
- E. Todorov, T. Erez, and Y. Tassa, “MuJoCo: A physics engine for model-based control,” in 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. Vilamoura-Algarve, Portugal: IEEE, Oct. 2012, pp. 5026–5033.
- E. Arruda, M. J. Mathew, M. Kopicki, M. Mistry, M. Azad, and J. L. Wyatt, “Uncertainty averse pushing with model predictive path integral control,” 2017 IEEE-RAS 17th International Conference on Humanoid Robotics (Humanoids), 2017.
- L. Cong, M. Grner, P. Ruppel, H. Liang, N. Hendrich, and J. Zhang, “Self-Adapting Recurrent Models for Object Pushing from Learning in Simulation,” in 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Las Vegas, NV, USA: IEEE, Oct. 2020, pp. 5304–5310.
- A. Zanelli, A. Domahidi, J. Jerez, and M. Morari, “FORCES NLP: an efficient implementation of interior-point methods for multistage nonlinear nonconvex programs,” International Journal of Control, vol. 93, no. 1, pp. 13–29, Jan. 2020.
- M. Spahn, C. Salmi, and J. Alonso-Mora, “Local Planner Bench: Benchmarking for Local Motion Planning,” 2022.
- S. Karaman and E. Frazzoli, “Sampling-based algorithms for optimal motion planning,” The International Journal of Robotics Research, vol. 30, no. 7, pp. 846–894, Jun. 2011.

Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Collections
Sign up for free to add this paper to one or more collections.

