- The paper introduces a risk-aware MPPI method that integrates proactive trajectory adjustments to minimize collision risks in complex environments.
- It employs minimum jerk trajectory parametrization and efficient CPU-based sampling to enable real-time trajectory updates without GPU dependency.
- Simulation and experimental results with RotorS and Crazyflie quadrotors demonstrate reduced collisions and enhanced navigational agility.
A Model Predictive Path Integral Method for Fast, Proactive, and Uncertainty-Aware UAV Planning in Cluttered Environments
Introduction
Autonomous motion planning in cluttered environments poses substantial challenges, particularly for UAVs where tracking errors can profoundly impact navigation safety. The paper introduces a receding-horizon motion planning approach based on Model Predictive Path Integral (MPPI) control theory, aiming to address these challenges through a flexible sampling-based control technique that accommodates vehicle dynamics and cost functions. This approach integrates a data-informed risk function to enhance trajectory planning by addressing uncertainties inherent in real-world applications.
Proposed Approach
The proposed methodology leverages MPPI control to proactively adapt UAV motion planning to current environmental conditions, aiming to minimize collision risks while maintaining operational agility.
Trajectory Parametrization
Trajectories are defined using minimum jerk segments, characterized by waypoints that establish spline-based trajectories. This parameterization facilitates efficient sampling within a lower-dimensional space, enabling real-time trajectory updates on CPUs without necessitating GPU acceleration.
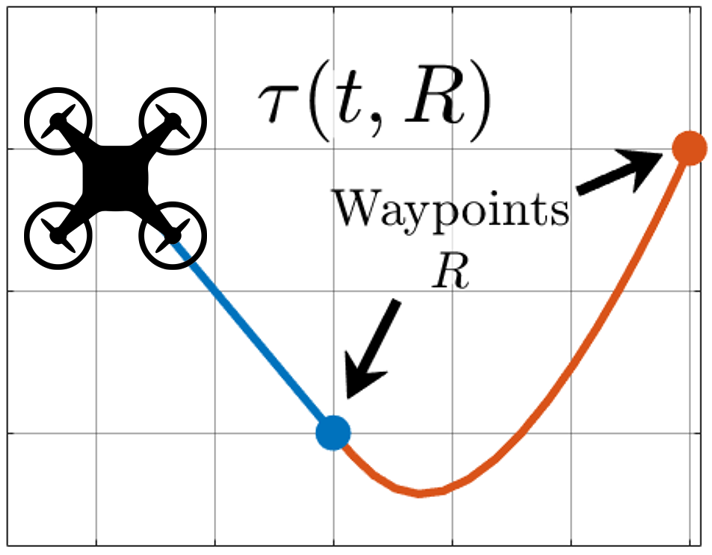
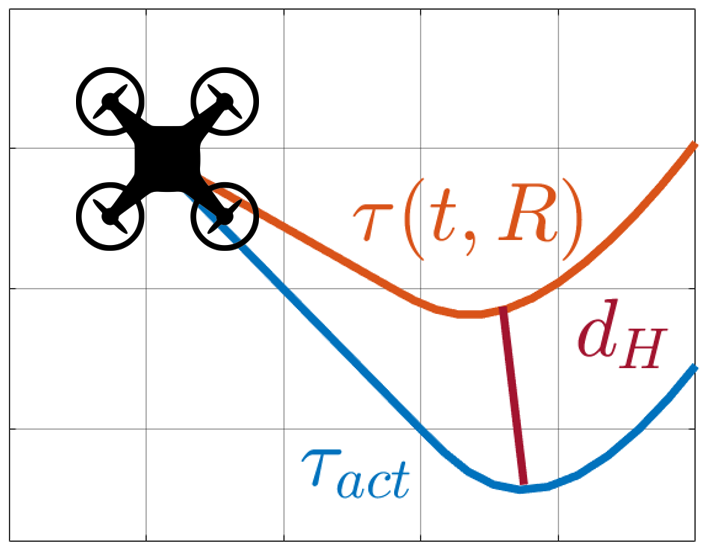
Figure 1: Example of min-jerk trajectory shown in (a), and example of trajectory tracking error shown in (b).
Risk Measure
A novel risk measure is introduced, quantifying geometric mismatches between planned and executed trajectories, attributed primarily to commanded speeds. The risk measure ρ(⋅) links these discrepancies to collision potentials with nearby obstacles, informed by trajectory speed deviations.
MPPI Algorithm
MPPI is employed to iteratively refine trajectory waypoints by sampling perturbations within the trajectory parameter space. The algorithm aims to derive trajectory sets that minimize overall costs—including obstacle and risk-based costs—thus enabling responsive navigation adjustments.
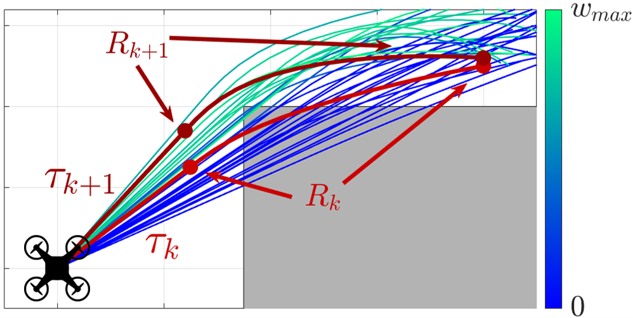
Figure 2: An example iteration step of the MPPI algorithm.
Simulation Results
Simulations using RotorS demonstrated that the integration of risk-aware components into the MPPI framework effectively reduced collision rates. The UAV could navigate complex obstacle courses while maintaining agility, adjusting speed dynamically based on proximity to potential hazards.
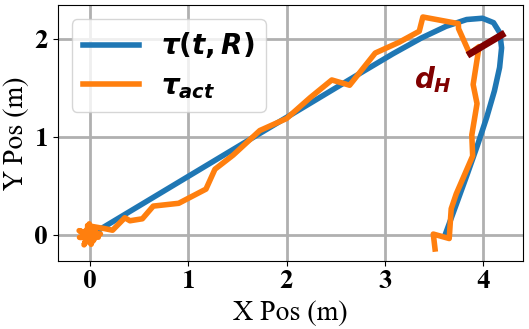
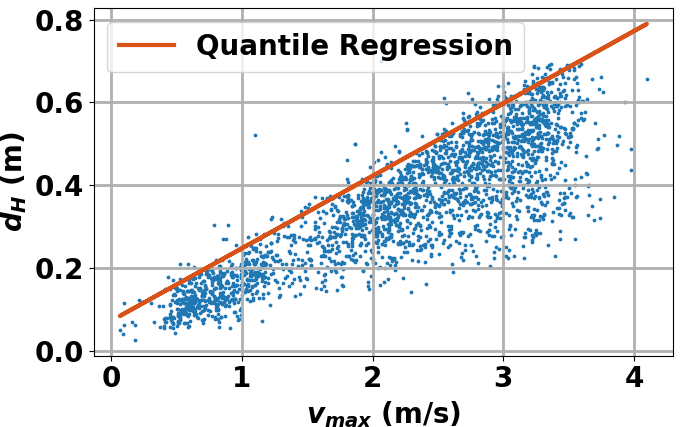
Figure 3: RotorS UAV trajectory data used for risk cost C.
Experimental Validation
Experiments with Crazyflie quadrotors further substantiated the approach's practicality. Through iterative path planning, the UAV successfully navigated both rectangular loops and city block setups, adapting speed profiles in response to environmental clutter to effectively decrease collision occurrences compared to risk-agnostic planning.
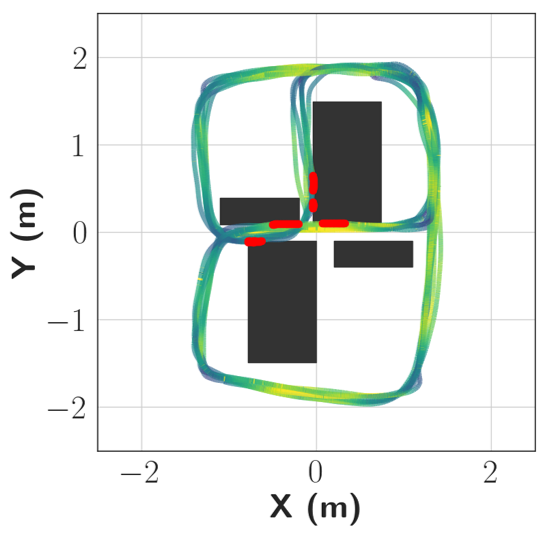
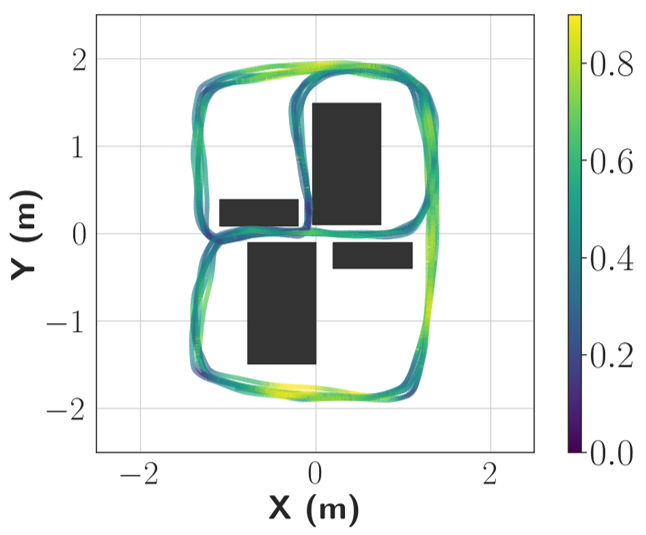
Figure 4: Crazyflie positions and velocities for the 4-way city block environment (a) without considering risk and (b) with the full approach.
Conclusion
The integration of MPPI with data-informed risk assessment allows UAVs to dynamically adjust trajectories in cluttered environments without GPU dependency. Future exploration may involve broader applications in diverse robotic contexts, refining risk measures for more incisive predictive control strategies that balance speed and safety.
This paper lays groundwork for advancing real-time path planning techniques to accommodate uncertainty by embedding risk-awareness directly into trajectory optimization processes. Potential extensions of this research include applications in outdoor navigation and interaction with dynamic environmental elements such as humans or other vehicles, enhancing both predictive capabilities and interaction safety. Future work should focus on evolving sophisticated risk formulations that consider a wider range of environmental factors and robotic interactions.