- The paper introduces a learning-based residual method to adapt robotic friction models using minimal additional data.
- It employs a base neural network complemented by a secondary network to accurately capture friction dynamics, resulting in a 60-70% performance boost.
- The proposed approach minimizes data requirements while enhancing robustness in dynamic robotic environments for safer human-robot interactions.
Adaptive Robotic Friction Modeling via Learning-based Techniques
This essay discusses a learning-based approach to adapt robotic friction models to new dynamics using minimal data. The motivation stems from overcoming the limitations in traditional model-based friction models that often cannot properly capture the complex dynamics these systems may face in various operational scenarios. This work emphasizes a residual learning strategy, leveraging neural networks to enhance the adaptability and precision of friction torque estimation in robotic joints.
Introduction to Friction Modeling Challenges
Accurate friction modeling is critical for effective control and interaction in robotic systems, especially in human-robot collaborative environments, where dynamic and changing conditions prevail. Friction in robotic joints does not have a comprehensive mathematical model due to its dependence on numerous factors like wear, temperature, and load variations, hence the necessity for data-driven approaches. Conventional and even some existing data-driven models have generalized poorly across untrained dynamics, impacting their efficacy during robotic operations.
Methodology
The paper proposes a structured framework incorporating residual learning techniques to adapt existing friction models to new dynamic conditions efficiently. This consists of two primary steps:
- Base Neural Network Model: A neural network is first trained on a comprehensive dataset representing symmetric friction behavior across the entire operational range of velocities and positions. This base model learns the fundamental relationship between the velocity, gravitational torque, and resulting friction torque.
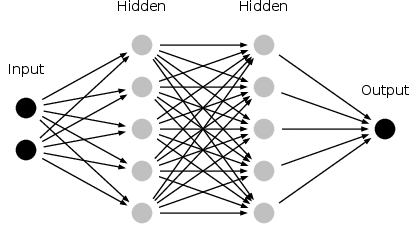
Figure 1: The architecture of the base neural network: Fully connected neural network with 2 hidden layers, each consisting of 30 neurons (for space reasons, we only show five neurons here).
- Residual Correction via Additional Network: To address new dynamics, a secondary neural network is trained on residuals—the discrepancies between the base model predictions and new measured data. The emphasis is on minimizing data, exemplified by requiring only 43 seconds of additional movement data without external torque sensors.
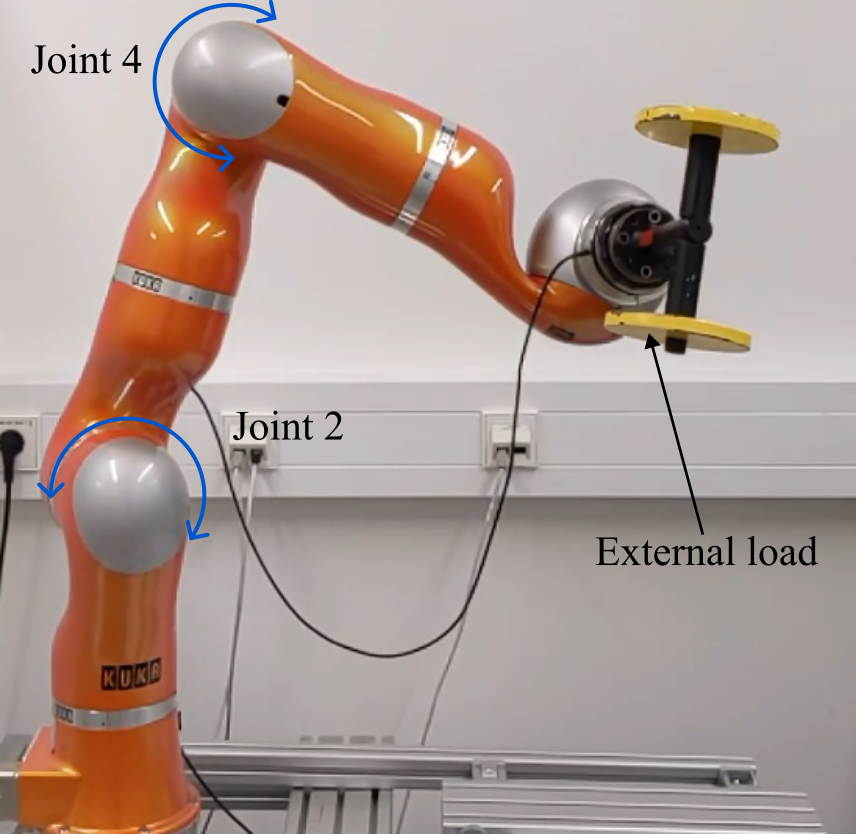
Figure 2: The experimental setup: the robot is equipped with physical torque sensors in each joint output for the reference signals, while the measured motor current is used in the proposed method.
Results and Analysis
The proposed method was evaluated against conventional model-based techniques and standalone neural networks. The friction torque predictions from the adapted model significantly outperformed both benchmark approaches, showing up to an approximate 60-70% accuracy improvement even when generalized to external load scenarios not present in the training data. The neural network-based approach demonstrated the capability to capture dynamic friction behaviors like inertia and gravitational effects more effectively than traditional methods, validated using torque sensors.
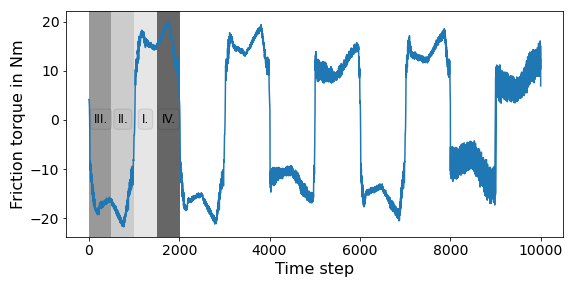
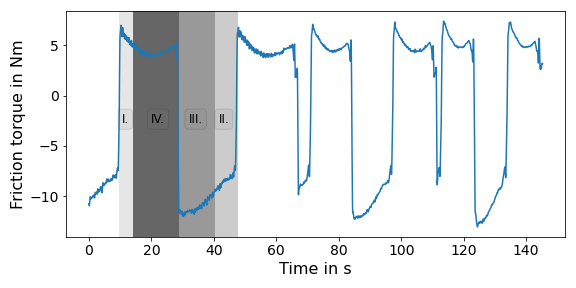
Figure 3: Collected friction data set.
Moreover, the framework does not depend on new domain-specific knowledge or complex data scalability, thus reducing implementation costs and enabling widespread applicability in diverse robotic settings.
Implications and Future Work
This approach contributes significantly to overcoming current friction modeling barriers by providing a flexible, adaptive system for dynamic environments. Such advancements are pivotal for enhancing joint-level control performance, ensuring safe human-robot interactions, and refining external force estimation techniques.
Future research could explore integrating this adaptive model into real-time applications, improving models' interpretability, and expanding the online learning paradigms to handle misalignment problems dynamically. Additionally, investigating its applicability to more complex robotic systems can open new avenues in adaptive robotic control systems.
Conclusion
The proposed learning-based adaption method for robotic friction models presents a compelling solution to addressing the limitations of conventional approaches. By leveraging minimal data alongside established models, this approach enhances adaptability and precision, priming robotic systems for broader and more efficient deployments. As robotics integration continues to expand in industrial applications, such adaptive modeling techniques will be integral to advancing collaborative and autonomous robotic ecosystems.