- The paper introduces a virtual sensor using HTGNN to predict bearing loads from temperature and vibration, bypassing direct load measurement challenges.
- The model leverages a heterogeneous temporal graph combining CNN, GRU, GCN, and GATv2 to capture spatial-temporal dependencies among sensor signals.
- Experimental results show that HTGNN reduces prediction error significantly, achieving about one-third the MAPE for axial loads and half for radial loads compared to a 1D CNN.
Heterogeneous Temporal Graph Neural Networks for Bearing Load Prediction
The paper introduces a Heterogeneous Temporal Graph Neural Network (HTGNN) to estimate bearing loads from vibration and temperature measurements. The approach aims to create a virtual sensor that can predict bearing loads even when direct load measurements from sensor rollers are unavailable due to battery limitations. By explicitly modeling the spatial-temporal dependencies among different sensor signals, HTGNN outperforms traditional Convolutional Neural Networks (CNNs) in capturing the complex interactions between temperature, vibration, and load.
The core challenge is to accurately predict bearing loads using data from conventional condition monitoring sensors, such as temperature and vibration sensors. Direct load measurement is complex and often impractical, which motivates the development of a virtual sensor that maps available measurements to load estimates. The paper addresses this by leveraging Graph Neural Networks (GNNs) to exploit spatial-temporal dependencies among sensor signals. Traditional machine learning algorithms often struggle to fully utilize these dependencies, especially when dealing with heterogeneous signal characteristics like those from temperature and vibration sensors.
HTGNN Architecture and Implementation
The HTGNN architecture (Figure 1) comprises four key components: heterogeneous temporal graph construction, context-aware heterogeneous dynamics extraction, heterogeneous interaction modeling, and load prediction.
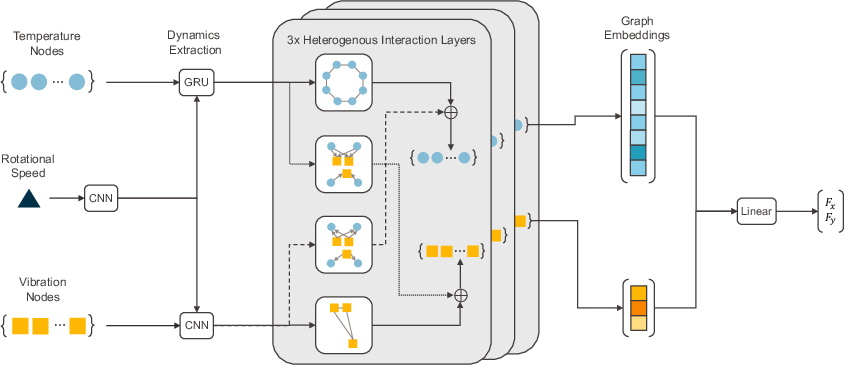
Figure 1: Architecture of the proposed Heterogeneous Temporal Graph Neural Network (HTGNN) for Load Prediction.
The heterogeneous temporal graph is constructed with temperature and vibration sensors as distinct node types, connected by edges representing their spatial relationships. The model uses a combination of 1D CNNs and Gated Recurrent Units (GRUs) to capture the temporal dynamics of vibration and temperature signals, respectively. Contextual information from rotational speed is integrated to enhance the dynamics modeling. Heterogeneous interactions are modeled using Graph Convolutional Networks (GCNs) for same-type node interactions and Graph Attention Networks v2 (GATv2) for different-type node interactions. Finally, a Multilayer Perceptron (MLP) predicts the axial and radial loads based on the learned node representations.
Experimental Setup and Results
The HTGNN was evaluated using data collected from a test rig with two identical tapered roller bearings (Figure 2).
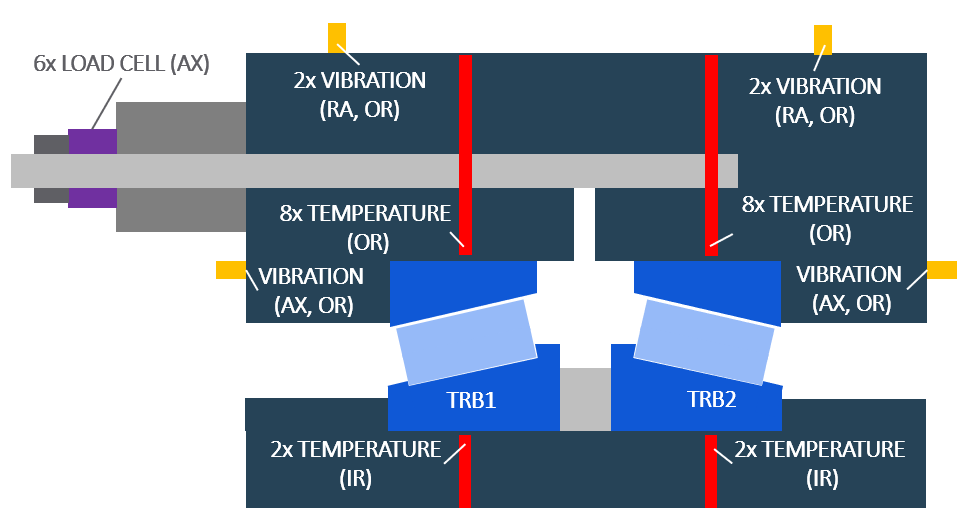
Figure 2: Test-rig configuration.
The dataset includes temperature and vibration data, along with axial and radial forces measured by load cells. The data was split into training (55\%) and testing (45\%) sets, with some operating conditions (unique combinations of axial load Fx, radial load Fy, and rotational speed) present only in the test set to assess generalization (Figure 3).
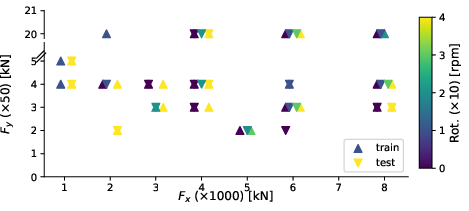
Figure 3: Train-test split of bearing load conditions for vibration data analysis (55\% training, 45\% testing)
The HTGNN was compared against a 1D CNN baseline. Results showed that the HTGNN significantly outperformed the CNN in predicting bearing loads, especially under conditions seen during training (Table 1). The HTGNN achieved approximately one-third the Mean Absolute Percentage Error (MAPE) for axial load (Fx) and half the MAPE for radial load (Fy) compared to the 1D CNN. Even in unseen conditions, HTGNN exhibited better generalizability due to its ability to capture complex interactions between temperature and vibration measurements (Figure 4).
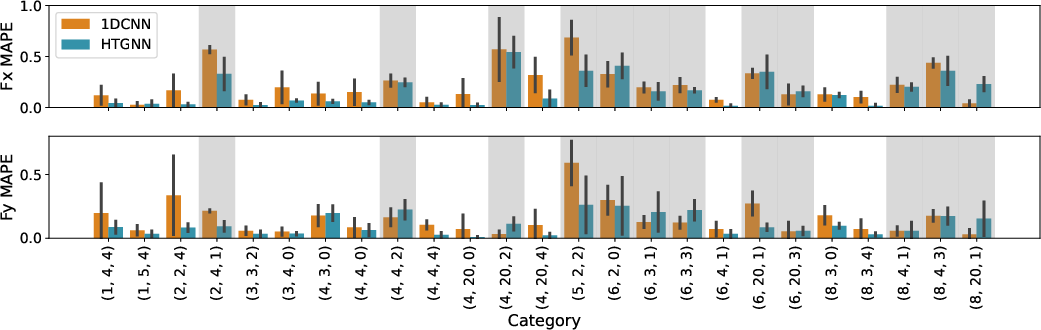
Figure 4: Mean test set performance averaged over 5 runs of CNN and HTGNN on bearing load conditions F_x (\times 1000) [kN], F_y (\times 50) [kN], and rotational speed (times 10) [r/min]. Shaded areas indicate unseen conditions.
Modeling Heterogeneous Relationships
The bearing sensor network connectivity provides an effective inductive bias. The HTGNN's architecture is well-suited to represent these heterogeneous relationships. In contrast, 1DCNN's homogeneous approach to processing variables limits its ability to model such complex interdependencies, leading to higher prediction errors.
The construction of heterogeneous graphs for bearing sensor network relationship modeling includes (a) T-T, (b) V-V, (c) T-V, (d) V-T, and (e) connectivity across two test rig bearings (Figure 5).
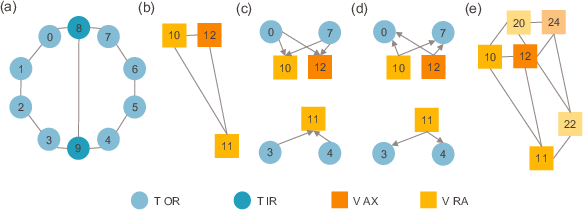
Figure 5: Heterogeneous graphs for bearing sensor network relationship modeling. (a) T-T (b) V-V (c) T-V (d) V-T (e) connectivity across two test rig bearings.
Conclusion and Future Directions
The paper demonstrates the effectiveness of HTGNN as a virtual sensor for predicting bearing loads by integrating heterogeneous sensor data and modeling their spatial-temporal dependencies. The HTGNN outperformed traditional 1D CNN models, showcasing the importance of incorporating physical priors and inductive biases. Future work could focus on expanding the training data to include a broader range of operating conditions, particularly rotational speeds, to improve generalization capabilities. Additionally, evaluating the model's performance using real load data from sensor rollers in real-world operations would further validate its applicability. The input signals and load prediction performance are shown in Figure 6.
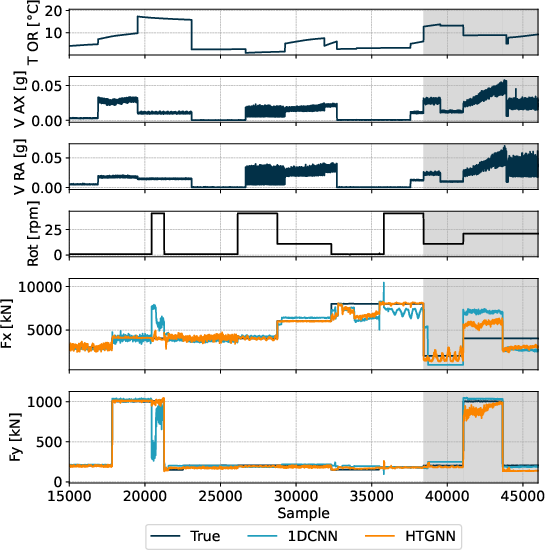
Figure 6: Examples of input signals and load prediction performance. Shaded areas indicate unseen conditions.