A Unified Approach for Learning the Dynamics of Power System Generators and Inverter-based Resources
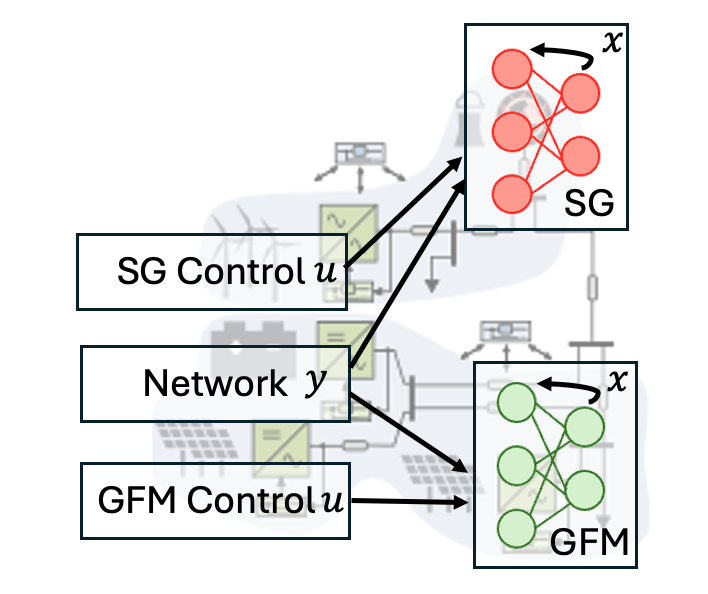
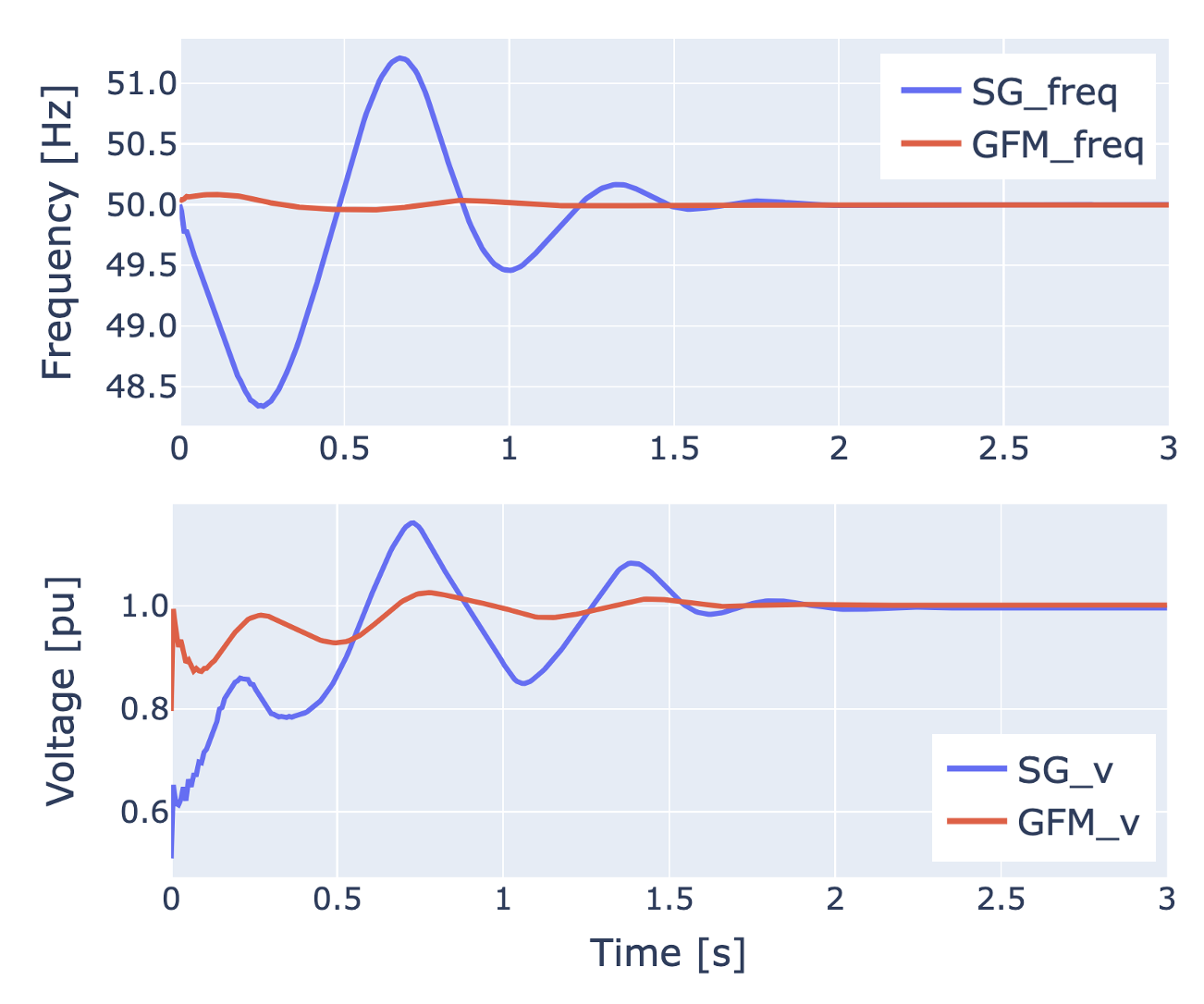
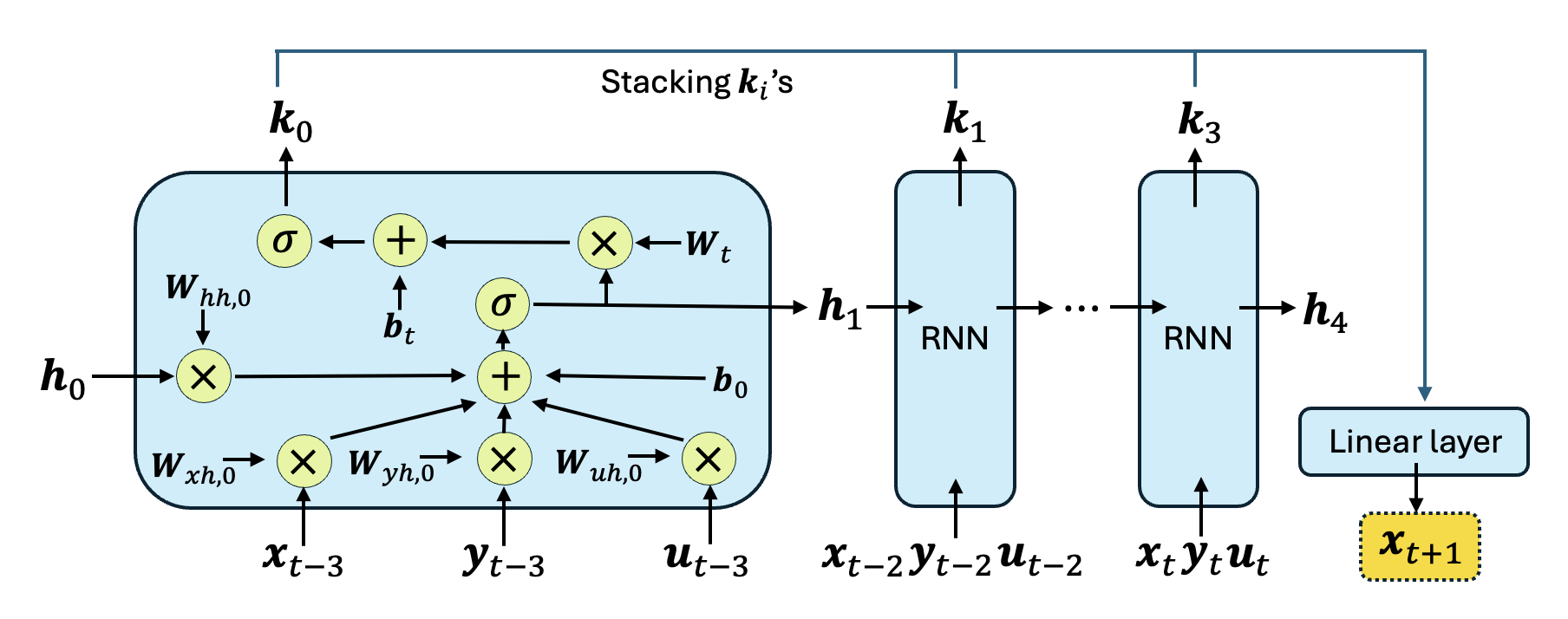
Abstract: The growing prevalence of inverter-based resources (IBRs) for renewable energy integration and electrification greatly challenges power system dynamic analysis. To account for both synchronous generators (SGs) and IBRs, this work presents an approach for learning the model of an individual dynamic component. The recurrent neural network (RNN) model is used to match the recursive structure in predicting the key dynamical states of a component from its terminal bus voltage and set-point input. To deal with the fast transients especially due to IBRs, we develop a Stable Integral (SI-)RNN to mimic high-order integral methods that can enhance the stability and accuracy for the dynamic learning task. We demonstrate that the proposed SI-RNN model not only can successfully predict the component's dynamic behaviors, but also offers the possibility of efficiently computing the dynamic sensitivity relative to a set-point change. These capabilities have been numerically validated based on full-order Electromagnetic Transient (EMT) simulations on a small test system with both SGs and IBRs, particularly for predicting the dynamics of grid-forming inverters.

Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Knowledge Gaps
Knowledge gaps, limitations, and open questions
Below is a single, consolidated list of specific gaps and open issues that remain unresolved and could guide future research:
- Reduced-order validity and limits:
- The reduced-order state set [δ, ω, E] for both SGs and GFMs assumes negligible impact from high-frequency modes and relatively stable inverter currents; the range of operating conditions (fault severity, harmonic content, weak-grid conditions, PLL interactions, LCL resonance) under which these simplifications remain accurate is not quantified.
- Elimination of certain SG internal states (e.g., via small ) and the approximation of current dynamics via algebraic relations are not validated across diverse generator models, saturation limits, and excitation/governor nonlinearities.
- Scope of inverter modeling:
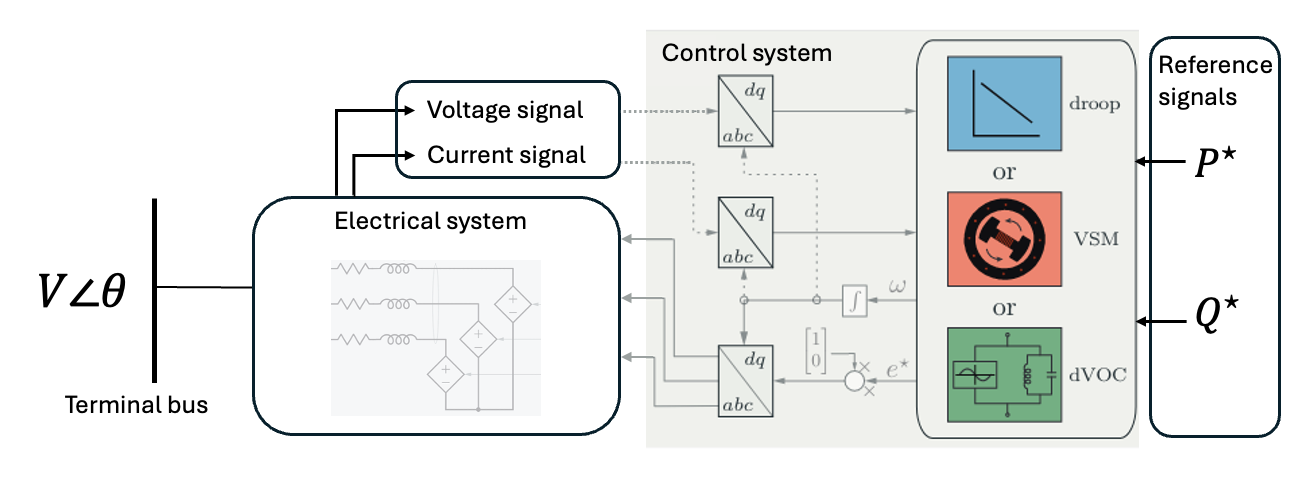
- The unified GFM model relies on strong assumptions (single inductor filter, pure inductive lines, stiff grid, perfect synchronization), which are often violated in practice; the approach’s fidelity under realistic filter/line models (e.g., LCL, mixed R/X, weak grids) is not assessed.
- Only dVOC-based GFMs are demonstrated; generalization to droop and VSM parameterizations (and controller nonlinearities or limits) is claimed but not empirically evaluated.
- Grid-following (GFL) inverters—the current majority in deployments—are not modeled or learned; the approach’s adaptability to GFL control architectures remains unexplored.
- Network integration and modular coupling:
- The paper proposes terminal-bus decoupling and static power flow coupling for integration, but does not implement or validate a full system-wide modular coupling under dynamic DAEs (e.g., dynamic loads, network algebraics, voltage-dependent devices, protection actions).
- Stability and accuracy of the integrated multi-component SI-RNN framework under changing network topology (line outages, breaker operations) and strong inter-component interactions are not analyzed.
- How the modular SI-RNNs would be jointly solved or iteratively coupled with network-level constraints (e.g., power flow solvability, voltage constraints) is left unspecified.
- Theoretical guarantees and numerical stability:
- SI-RNN is inspired by RK4 but lacks formal stability or convergence guarantees; learned “RK-like” weights are unconstrained (e.g., no Butcher tableau structure), so improved stability regions are not theoretically established.
- The choice of time-step and its relation to stiffness, approximation error, and stability (CFL-like conditions) is empirical; guidelines for selecting Δt to ensure stable long-horizon predictions are absent.
- No analysis of error accumulation, boundedness of trajectories, or Lyapunov-style guarantees for iterative rollout is provided.
- Sensitivity modeling and validation:
- The dynamic sensitivity computation via automatic differentiation is not systematically validated against finite differences across a broad set of scenarios, time horizons, and noise conditions; discrepancies, smoothness issues, and gradient reliability are acknowledged but not resolved.
- Sensitivity trajectories are shown for only –ω; extension to multi-input sensitivities (e.g., , voltage setpoints, controller gains) and cross-sensitivities is not studied.
- Use of sensitivity-aware loss functions (regularizing training with sensitivity matching) is proposed but not implemented or evaluated.
- Data and measurement realism:
- Training and validation rely on synthetic EMT/Simulink data from small systems; robustness to real-world measurement noise, PMU synchronization errors, missing data, and sensor biases is not addressed.
- The filtering and down-sampling pipeline (10 kHz EMT to ~100 Hz) may remove essential fast modes; the impact of sampling rate and preprocessing on model fidelity and response to rapid transients is not quantified.
- Required inputs (terminal bus phasors, controller set-points) may not be fully observable or time-aligned in practice; strategies for handling partial observability and unknown inputs are not provided.
- Generalization and scalability:
- The approach is tested on an SMIB and a 5-bus subsystem only; scalability to larger, heterogeneous grids with many components, diverse device models, and complex event sequences is untested.
- Generalization to unseen contingencies (locations/types of faults, multi-stage events, cascading outages), parameter variations (device ratings, controller gains), and operating regimes (low inertia, high IBR penetration) is not characterized.
- Controller nonlinearities, limits, and protections:
- Nonlinearities (exciter/gov saturation, deadbands), actuator limits, and protection dynamics (tripping, fault ride-through, current limits) are not included in the learned models; their omission can materially affect transient behaviors.
- Secondary/tertiary control layers, communication delays, and cyber-physical constraints are not modeled, limiting applicability to real-world hierarchical control settings.
- Comparative baselines and benchmarking:
- No comparison to neural ODEs, physics-informed models, Koopman/operator learning, or other hybrid identification methods; trade-offs in accuracy, computational cost, and integrability are not quantified.
- The computational advantages vs. EMT or other reduced-order simulators (runtime, memory, training/inference costs) are not benchmarked.
- Training methodology and reproducibility:
- Hyperparameter sensitivity (hidden state size, number of stacked blocks, activation functions), initialization schemes, and training stability (e.g., vanishing/exploding gradients across long sequences) are not analyzed.
- Uncertainty quantification, calibration, and confidence bounds on predictions (states and sensitivities) are absent; methods to detect when the model is extrapolating beyond training distribution are not provided.
- Practical deployment and control integration:
- How SI-RNN outputs (states, sensitivities) would be integrated into real-time operations, optimization, and control (e.g., MPC, contingency screening) under strict timing and reliability constraints is not demonstrated.
- Safety and verification mechanisms (e.g., constraint enforcement, fail-safes, certified bounds) for using learned models in closed-loop control remain open.
- Data requirements and domain adaptation:
- Minimum data duration, diversity, and quality needed to train reliable component models are not specified; guidelines for transfer learning or domain adaptation across sites/devices are lacking.
- Strategies for continual learning and model updating under equipment aging, firmware changes, or controller retuning are not explored.
Collections
Sign up for free to add this paper to one or more collections.