- The paper introduces SG-SLAM, a novel semantic graph-based SLAM framework that improves localization and global mapping through robust object-level abstraction.
- It integrates weighted semantic registration and dual-threaded architecture to effectively handle odometry failures and achieve real-time performance at 10 Hz+ on commodity CPUs.
- Empirical evaluations on KITTI, MulRAN, and Apollo show significant reductions in trajectory errors, demonstrating superior drift suppression and reliability.
Semantic Graphs for Robust LiDAR SLAM: Technical Advances and Implications
Introduction and Context
Simultaneous Localization and Mapping (SLAM) forms the basis of autonomous navigation in robotics and intelligent vehicles, with LiDAR-based approaches being highly favored due to their robustness to illumination changes and metric accuracy. While geometry-based LiDAR SLAM algorithms dominate current practice, their reliance on low-level features presents several limitations in dynamic and semantically complex environments. Recent efforts have introduced semantics into SLAM pipelines, typically by incorporating point-wise semantic segmentation, but these approaches tend to struggle with generalization, storage efficiency, and recovery from odometry failures. The paper "Leveraging Semantic Graphs for Efficient and Robust LiDAR SLAM" (2503.11145) addresses these limitations by proposing a semantic graph-enhanced SLAM (SG-SLAM) system, utilizing object-level semantic graphs as the core scene abstraction for robust, real-time operation and globally consistent mapping.
System Architecture and Methodological Innovations
The proposed SG-SLAM framework leverages a dual-threaded architecture comprising a front-end for odometry/relocalization and a back-end for loop closure, pose graph optimization, and map maintenance.
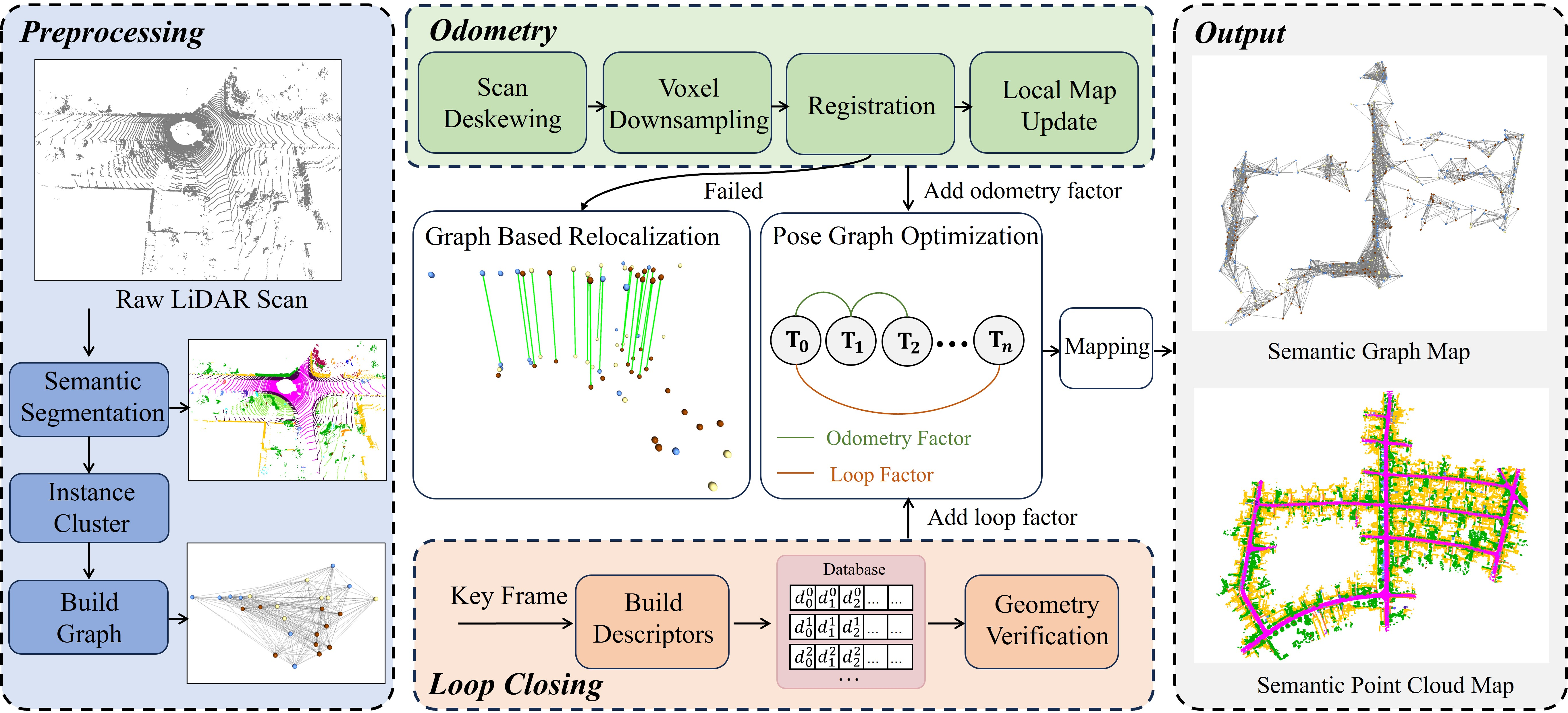
Figure 1: The SG-SLAM framework partitions odometry/data preprocessing and loop closure/map optimization into distinct threads for real-time efficiency and parallelization.
Semantic graphs replace conventional point-wise or surfel-based semantic representations. Each object instance in the LiDAR scan is represented as a node in the semantic graph, capturing geometry, semantics, and topology (neighborhood relationships). Node descriptors, derived from prior work, facilitate robust object instance matching, enabling consistent mapping and robust data association across frames and loop closures.
In the front-end, SG-SLAM extends ICP-based registration by incorporating semantic label-specific weights in the residual optimization rather than rigid label consistency checks. This design provides a soft constraint against erroneous outlier rejection in the presence of degraded or uncertain segmentation, a scenario common in real-world and OOD environments.
Additionally, the system incorporates semantic graph-based relocalization. Upon detection of odometric inconsistency (by thresholding the transformation error between prediction and frame-to-map alignment), the pose is recovered using RANSAC/SVD registration of matched semantic instance nodes, followed by ICP refinement. This mechanism allows for automated recovery from odometry failures, an issue largely neglected in classical pipelines.
Loop closure integrates prior semantic graph-based techniques for candidate retrieval (via descriptors) and geometric verification, inserting loop closure constraints into the pose graph for global consistency. Keyframe selection strategies ensure scalability.
Mapping is realized through a combination of global semantic graphs and dense point cloud maps generated after pose graph optimization. Instance state consistency is maintained through multi-observation fusion and careful management of new or matched nodes during both expansion and loop closure.
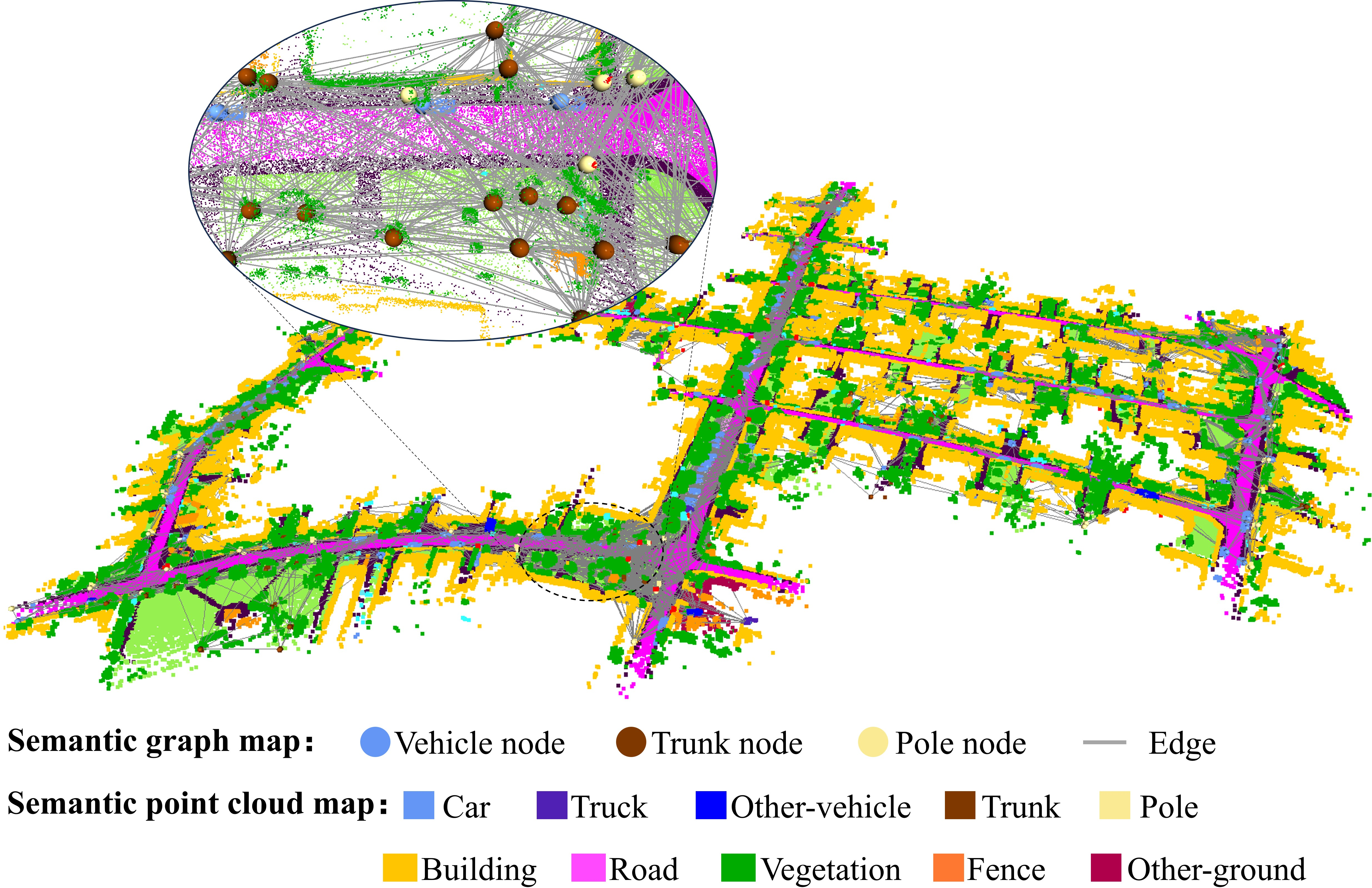
Figure 2: SG-SLAM outputs globally consistent semantic graph maps and dense point cloud maps, integral for downstream planning and navigation.
Empirical Evaluation and Numerical Claims
SG-SLAM is evaluated on three diverse datasets: KITTI, MulRAN, and Apollo, which span varying environments, sensor configurations, occlusion levels, and scale. Across these datasets, the framework consistently outperforms both geometry-based and semantic-aided baselines in terms of Absolute Trajectory Error (ATE) and relative translational error. Notably:
- On KITTI, average ATE is reduced to 0.99 m (loops-only sequences), outperforming all baselines including recent semantic ICP variants.
- On MulRAN, designed with significant sensor occlusion and degraded segmentation conditions, SG-SLAM achieves a mean ATE of 4.59 m, substantially better than the next best approach (8.62 m).
- On Apollo, SG-SLAM yields a mean ATE of 0.43 m, again surpassing alternative semantic and geometric methods.
Trajectory analysis across datasets demonstrates minimal deviation from ground truth, indicating superior drift suppression.
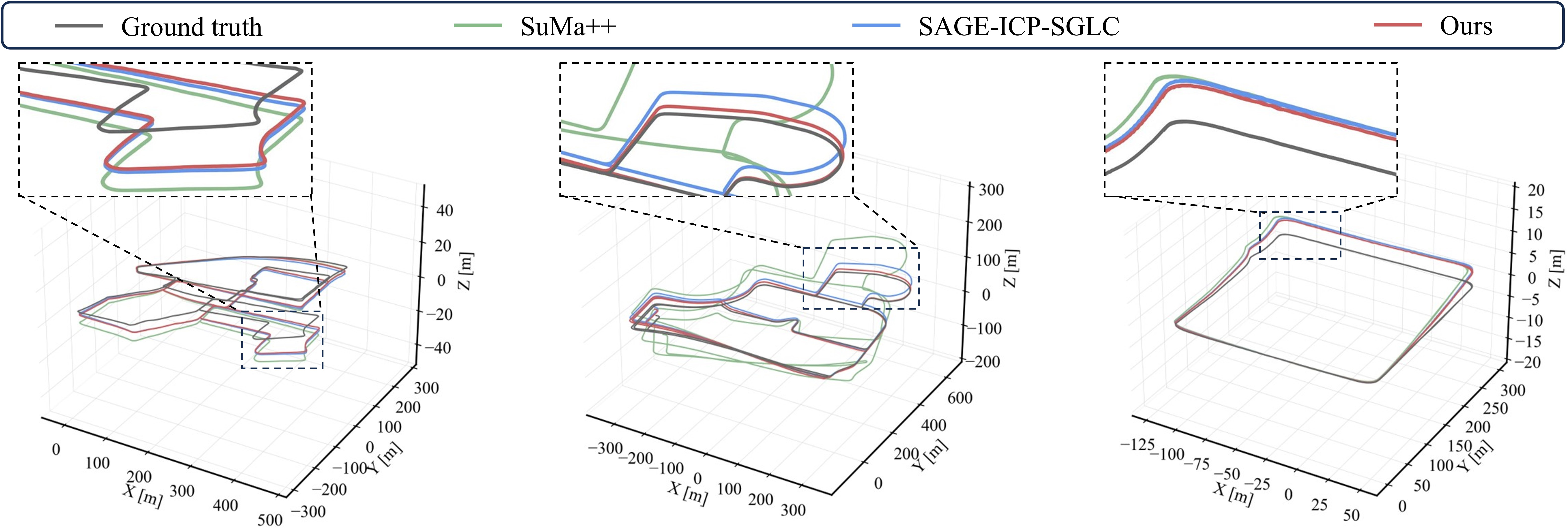
Figure 3: SG-SLAM trajectories closely match ground truth across KITTI, MulRAN, and Apollo, outperforming state-of-the-art semantic-aided baselines.
The semantic graph-based relocalization is shown to significantly mitigate performance loss under simulated odometry failures, with relative translational error increases under data dropout reduced by more than a factor of two compared to methods without relocalization. The entire system operates at approximately 10 Hz+ on commodity CPUs, demonstrating suitability for real-time deployment.
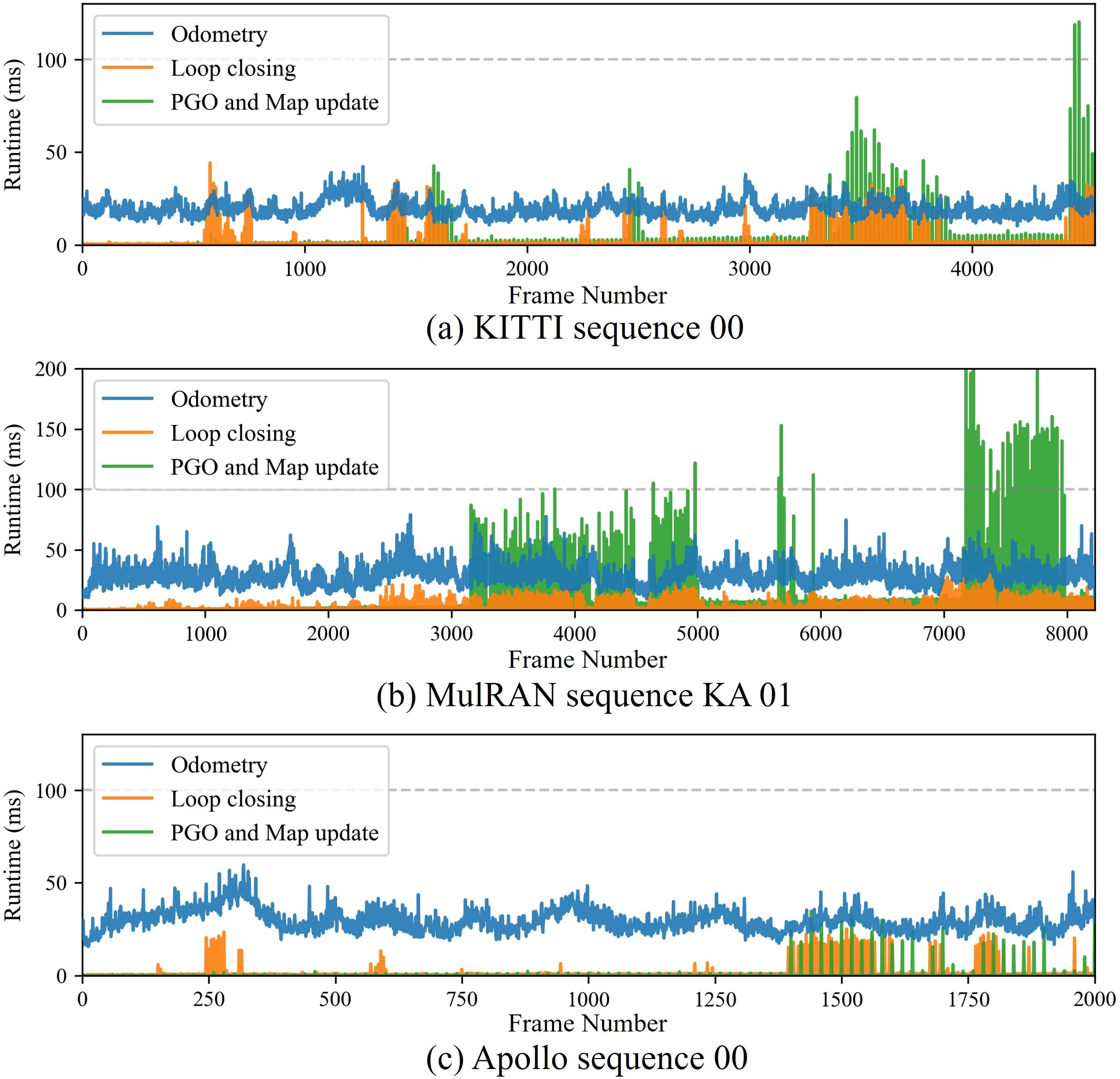
Figure 4: SG-SLAM achieves stable real-time performance across KITTI, MulRAN, and Apollo, with both odometry and backend threads remaining efficiently bounded in runtime.
Semantic Graph Mapping: Implications and Broader Significance
The object-centric semantic graph mapping paradigm introduces substantial advantages for both SLAM and downstream robotics applications. Object-level graphs encode semantics and topological structure at a granularity compatible with task-level planning, high-level reasoning, and global localization schemes [ma2025ral, yin2024icra, Weerakoon2023ral, Ni2024iros, Agia2022corl]. This representation provides inherent robustness to segmentation noise, enables compact storage, and matches well to the demands of graph-based navigation, pathfinding, and manipulation.
The weighted semantic alignment approach in odometry further underscores the need for probabilistic, uncertainty-aware semantic integration into registration pipelines, moving beyond brittle point-wise logic.
The demonstrated relocalization mechanism closes a key gap in the robustness of SLAM systems, particularly for long-term autonomy in the wild. Coupled with open-source implementation and competitive runtime characteristics, SG-SLAM forms an actionable reference point for future semantic SLAM research and real-world deployment scenarios.
Theoretically, the work reaffirms the utility of object-level abstraction in geometric understanding and challenges the conventional wisdom of purely low-level (point, surfel) mapping for sensor-based robotics. Its architectural separation of concerns, modularity for extensibility, and clear empirical validation in OOD and adverse environments provide a transferable design blueprint.
Directions for Future Research
Further advancements may extend from several axes:
- Uncertainty estimation: Integrating richer Bayesian semantics and robust weighting schemes for improved outlier suppression and registration precision, especially in open-set and long-tail scenarios.
- Multimodal and multisensor fusion: Combining semantic graph LiDAR SLAM with dense camera, radar, or map priors for improved global localization and resilience to environmental variability.
- Active SLAM: Utilizing the semantic graph structure to inform exploration, map refinement, and navigation strategies, leveraging object-level understanding for targeted information gain.
- Application to novel robotic domains: Adapting the semantic graph approach to new contexts (e.g., agriculture, mining, underwater robotics) and leveraging its compactness for edge and embedded AI deployment.
- Learning-based components: Further automation of instance descriptor learning, keyframe selection, dynamic object identification, and scene graph completion via data-driven or weakly supervised methods.
Conclusion
"Leveraging Semantic Graphs for Efficient and Robust LiDAR SLAM" (2503.11145) demonstrates that object-level semantic graph abstractions, coupled with robust weighted semantic registration and graph-based relocalization, significantly improve real-time SLAM performance in diverse, challenging scenarios. Its architecture addresses longstanding issues of efficiency, generalization, and robustness, with strong empirical support validated across multiple benchmarks. The implications of adopting semantic graphs reach beyond localization, enabling new directions in map representation, planning, and cognitive robotics. This work establishes a robust foundation and reference open-source system for advancing the field of semantic SLAM.