- The paper introduces a novel active training framework using ITSS and AIS to achieve robust LiDAR odometry with just 52% of the full training set.
- It details the ITSS strategy for capturing diverse motion sequences and the AIS strategy for targeted selection of challenging samples in complex conditions.
- Experiments on datasets such as KITTI and WADS validate that the proposed method delivers full-dataset performance with significant improvements in computational efficiency.
Efficient Active Training For Deep LiDAR Odometry
Abstract
The paper introduces an active training framework for deep LiDAR odometry aimed at improving model generalization while reducing the training load. The framework consists of two strategies: Initial Training Set Selection (ITSS) and Active Incremental Selection (AIS). ITSS constructs an initial training set from diverse motion sequences to form a strong baseline for pose estimation. AIS refines the model by actively selecting challenging training samples, particularly under complex conditions such as snowy weather, to broaden environmental adaptability. Notably, this framework achieves comparable performance to full-dataset training with just 52\% of sequence volume, validating its efficiency and robustness across diverse real-world scenarios.
Introduction
LiDAR Odometry (LO) forms a crucial component of the Simultaneous Localization and Mapping (SLAM) systems integral to autonomous driving. However, its performance deteriorates under adverse conditions like heavy snowfall due to inefficient adaptability to varied environments. Existing methods attempt to enhance adaptability by training models on large-scale datasets; however, they suffer from significant computational overheads and prolonged training durations due to non-discriminative data sampling. The paper proposes a solution through an active training framework utilizing ITSS and AIS to intelligently select training data, thereby boosting generalization capabilities while curbing inefficiencies.
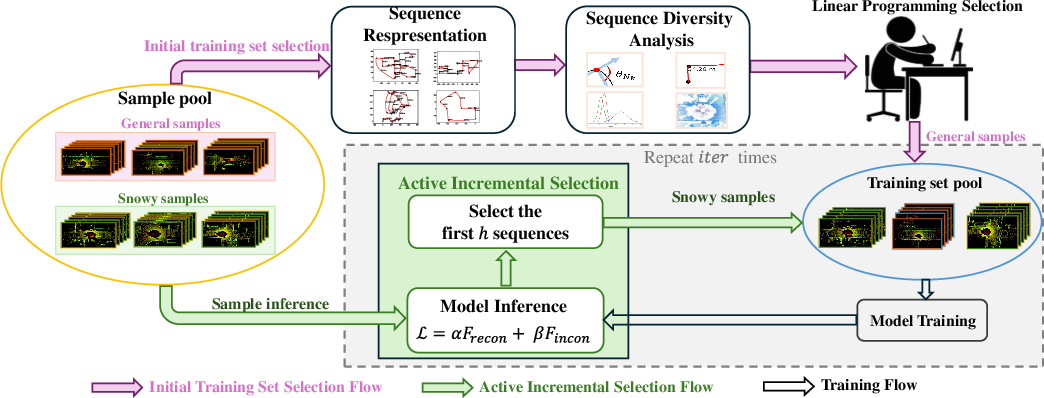
Figure 1: The overview of ActiveLO-training process. We analyze the sequence diversity of general samples with complex motion states and add the most informative sequences into the initial training set pool. Then, the model employs the incremental selection strategy to actively identify and select hard snow sequences, and this process is iterated for iter times until the model's performance is optimized.
Previous studies in supervised and unsupervised LiDAR odometry have explored various architectures and optimization strategies to enhance efficiency. Supervised approaches, such as LO-Net and PWCLO-Net, utilize 3D point cloud manipulation for efficient feature extraction without relying on 2D projections. Conversely, unsupervised methods, like RSLO and SelfVoxeLO, focus on accounting for data association challenges and employing self-supervised losses to mitigate manual annotation demands. Despite these advancements, issues remain around efficiently generalizing models for robustness under extreme environmental conditions.
Approach
Initial Training Set Selection Strategy (ITSS)
The ITSS methodology decomposes trajectories into nodes and edges to quantify sequence diversity accurately. It leverages metrics like trajectory variability and importance to capture motion state diversity. A structured approach ensures a consistent representation of motion patterns essential for 6-Degree-of-Freedom (6-DoF) pose learning.
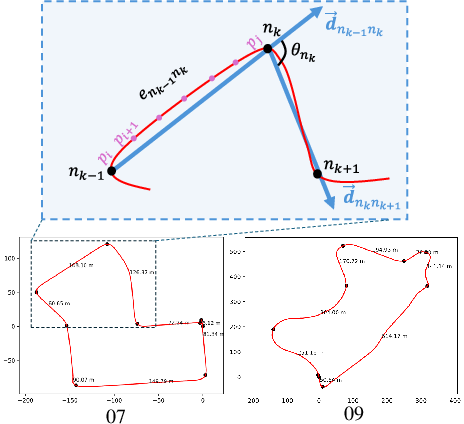
Figure 2: Labeling results for nodes and edges of sequences 07 and 09. Black dots indicate labeled nodes, and the length of edges between nodes is expressed in meters (m). The detailed calculation process of node features is shown in the blue box.
Active Incremental Selection Strategy (AIS)
AIS iteratively integrates samples from challenging environments using Scene Reconstruction Loss and Prediction Inconsistency Loss metrics. These metrics allow the model to actively pinpoint and adopt training sequences from underrepresented or complex scenarios, thus refining adaptability. The iterative method enhances robustness by expanding the network's exposure to challenging data incrementally.
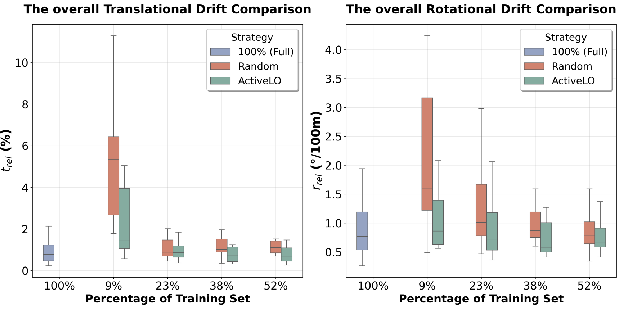
Figure 3: Overall Distribution of Translation and Rotation Errors for All Test Sequences. ActiveLO consistently and significantly outperforms the random method at every stage, approaching or exceeding 100\% performance with only 52\% of the sequence volume.
Experiment
Experiments were conducted using the KITTI, Ford, CADC, and WADS datasets to validate the training efficiency of the proposed solution. With significantly reduced training samples, ActiveLO-training matches full-dataset outcomes with marked gains in computational efficiency. The comparative analysis against conventional methods further underlines the robustness of the active training strategy across varied environmental conditions.
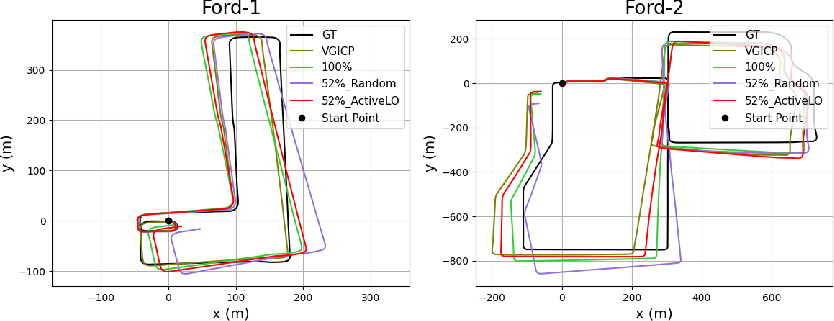
Figure 4: The trajectory visualization on dynamic sequences. The results indicate our method achieves optimal alignment with ground truth in dynamic scenes.
Conclusion
The ActiveLO-training strategy presents a novel method for optimizing LiDAR odometry training in deep learning contexts. By selectively utilizing key sequences from diverse scenarios, the approach ensures substantial efficiency improvements and robust prediction capabilities across variable environmental conditions. Future research directions include further advancing the training efficiency and integrating broader datasets for scalability and enhanced model generalization.