Cybersecurity AI: Humanoid Robots as Attack Vectors
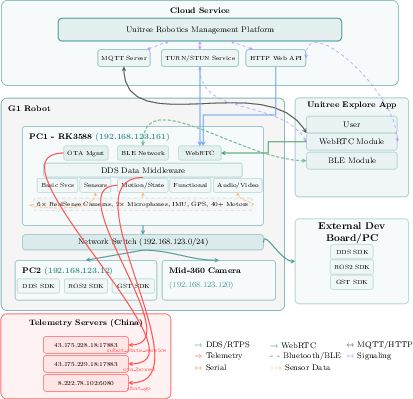
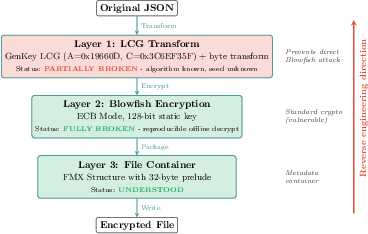
Abstract: We present a systematic security assessment of the Unitree G1 humanoid showing it operates simultaneously as a covert surveillance node and can be purposed as an active cyber operations platform. Initial access can be achieved by exploiting the BLE provisioning protocol which contains a critical command injection vulnerability allowing root access via malformed Wi-Fi credentials, exploitable using hardcoded AES keys shared across all units. Partial reverse engineering of Unitree's proprietary FMX encryption reveal a static Blowfish-ECB layer and a predictable LCG mask-enabled inspection of the system's otherwise sophisticated security architecture, the most mature we have observed in commercial robotics. Two empirical case studies expose the critical risk of this humanoid robot: (a) the robot functions as a trojan horse, continuously exfiltrating multi-modal sensor and service-state telemetry to 43.175.228.18:17883 and 43.175.229.18:17883 every 300 seconds without operator notice, creating violations of GDPR Articles 6 and 13; (b) a resident Cybersecurity AI (CAI) agent can pivot from reconnaissance to offensive preparation against any target, such as the manufacturer's cloud control plane, demonstrating escalation from passive monitoring to active counter-operations. These findings argue for adaptive CAI-powered defenses as humanoids move into critical infrastructure, contributing the empirical evidence needed to shape future security standards for physical-cyber convergence systems.

Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
Explaining “Cybersecurity AI: Humanoid Robots as Attack Vectors” for a 14-year-old
What is this paper about?
This paper looks at a human-shaped robot called the Unitree G1 and asks a simple question: Is it safe from hackers? The researchers tried to see whether the robot could secretly collect information (like a sneaky spy) and whether it could be turned into a tool to attack other computers. They also tested how “Cybersecurity AI” (smart software that protects or attacks in cyberspace) could work on a robot like this.
What were the main questions?
The researchers focused on three big ideas:
- Does the robot send data about its surroundings and its own status to the internet without the owner clearly knowing?
- Is the robot’s secret-protecting system (its encryption) strong, or can it be cracked?
- Could a smart cybersecurity program running on the robot discover weaknesses and prepare to attack other systems?
How did they study it?
They used a mix of digital detective work and careful monitoring:
- Reverse engineering: This means they took apart the robot’s software (like opening up a mechanical toy to see the gears) to understand how its security works, including its encryption system.
- Network traffic analysis: They watched what information the robot sent over the internet (like checking which letters a mailbox sends out and when). They used special tools to see the data even when it was supposed to be hidden.
- Performance profiling: They checked which robot programs were running and how much computer power each used.
- Real-world tests (“case studies”): They tested two situations—one where the robot behaved like a secret surveillance device and another where a “Cybersecurity AI” agent on the robot mapped out ways to attack targets.
- Plain-language translations of key technical terms:
- Encryption: Scrambling information so only someone with the right key can read it.
- Telemetry: Status reports a device sends about things like battery, temperature, or sensors.
- Exfiltration: Quietly sending information out to somewhere else, often without permission.
- MQTT/DDS/WebRTC: Different “mail systems” for devices to send messages and media (voice/video) across a network.
What did they find, and why does it matter?
Here are the main discoveries and their importance:
- Weakness in the robot’s “secret-keeping” system:
- The robot uses an encryption setup that reuses the same key across many robots and uses an old-fashioned mode that reveals patterns. That makes it much easier for skilled people to unlock and read protected data. This is like many houses on a street using the same house key—once you copy one, you can open them all.
- Silent data sharing to outside servers:
- The robot regularly sends detailed status reports online—things like battery levels, joint temperatures, what services are running, and more—without the user clearly being told or asked. It can also share audio and video streams on the local network. This could break privacy laws in some places because people are not being properly informed or given a choice.
- A “dual threat”: spying and attacking
- If someone abuses these weaknesses, the robot could act like a hidden surveillance device (capturing audio, video, and room maps) and also be used to plan cyberattacks on other systems. Imagine a moving computer with cameras and microphones that can travel into sensitive areas and then reach out to other computers from the inside.
- Cybersecurity AI on the robot can prepare attacks:
- The team ran a cybersecurity AI agent on the robot. It automatically looked for weaknesses and planned how an attack could work (they stopped before doing anything harmful). This shows that smart software can speed up both defense and offense—so defenders need equally smart tools too.
Even though the robot’s security is better than what the researchers usually see in similar machines, these problems are still serious because the robot has cameras, microphones, and network access. That combination raises the stakes.
What is the impact of this research?
This study is a warning and a guide:
- For robot makers: Use stronger, modern encryption with unique keys per device, turn on secure checks by default, and be transparent about what data is sent and why.
- For owners and workplaces (like factories, hospitals, or labs): Treat humanoid robots like powerful computers on wheels. Put them on secure networks, limit what data they can send, and monitor their traffic.
- For laws and standards: As humanoid robots enter homes and critical infrastructure, clear privacy rules and security standards are needed so users know what’s collected and can control it.
- For cybersecurity: Attackers can use AI to move faster. Defenders need to use AI too—“Cybersecurity AI”—to watch, detect, and block threats in real time.
In short, the paper shows that humanoid robots can become both helpful workers and dangerous digital “Trojan horses” if not secured properly. The solution is stronger, transparent security and smarter defenses that keep up with AI-powered threats.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
Below is a consolidated, action-oriented list of what remains missing, uncertain, or unexplored in the paper.
- FMX inner layer uncertainty: exact LCG seed derivation from device identifiers is not fully recovered; per-device uniqueness and rotation behavior remain unknown.
- No brute-force feasibility study of the 32-bit LCG seed space (time-to-crack estimates on commodity attacker hardware and at cloud scale are missing).
- Fleet-wide key reuse scope unclear: sample size, models/firmware covered, and cross-generation validation (e.g., H1/Go2/other Unitree lines) are not specified.
- Key lifecycle unknown: whether the static Blowfish key is ever rotated, revocable, or regionally varied is not assessed.
- Secret inventory incomplete: reconciliation between “no hardcoded secrets” (Table 1) and discovery of a hardcoded encryption key is absent.
- Encryption at rest not evaluated: status of eMMC/disk encryption, key storage, and data protection for logs and configuration is unknown.
- Boot chain and root-of-trust unassessed: secure/verified boot, fuse states, bootloader locking, rollback protection, and measured boot/attestation are not analyzed.
- OTA update security not examined: code signing scheme, update server authentication, rollback protections, delta integrity, and recovery paths are not validated.
- DDS/ROS 2 security posture incomplete: feasibility and performance impact of DDS Security/SROS2, key distribution, and QoS/ACL hardening are not evaluated.
- CVE coverage gap: specific unpatched CVEs affecting ROS 2 Foxy (EOL), CycloneDDS 0.10.2, and bundled libraries are not enumerated, reproduced, or risk-ranked.
- MQTT security details missing: broker-side ACLs, topic authorization, credential provisioning/rotation, certificate pinning/trust store contents, and revocation handling are not reported.
- WebRTC claim not operationalized: TLS verification-disabled assertion lacks an end-to-end MITM or hijack demonstration (STUN/TURN/ICE/DTLS-SRTP details absent).
- chat_go WebSocket risks unvalidated: practical exploitability of SSL verification disabled at 8.222.78.102:6080 (e.g., control hijack, transcript interception) is not tested.
- Longitudinal telemetry characterization missing: only 10 minutes of SSL_write capture; behavior across operating modes, regions, firmware updates, and network conditions is unstudied.
- Cloud exfiltration scope unclear: conditions under which audio/video/LIDAR streams leave the local network (vs. remain DDS-local) are not established; Kinesis endpoints and activation triggers are unverified.
- Data residency controls untested: whether brokers/endpoints can be regionally selected, overridden, or disabled by operators (and with what effect) is unknown.
- Lateral movement into air-gapped environments is asserted but not experimentally demonstrated (e.g., via rogue AP, BLE bridging, physical payloading, or RF constraints).
- Network exposure breadth not fully mapped: IPv6, mDNS/SSDP, multicast scopes, service discovery, and localhost-bound services are not inventoried.
- Physical attack surfaces not exercised: UART/JTAG/bootloader console access, tamper detection, debug fuse states, and fault-injection resilience remain untested.
- Wireless security unassessed: BLE pairing mode and MITM protection, Wi‑Fi auth (WPA2/3, WPS), MAC randomization, and hotspot/adhoc behaviors are not evaluated.
- On-device hardening unknown: presence and configuration of SELinux/AppArmor/seccomp, ASLR, kernel lockdown, containerization, and least-privilege service accounts are not characterized.
- Forensic readiness not covered: secure logging, clock integrity, signed logs, retention, remote attestation, and investigative visibility for operators are not assessed.
- Safety-security interplay untested: ability to bypass motion limits, speed/torque constraints, e-stop integrity, and fail-safe behaviors under cyber compromise are not validated.
- CAI demonstration limited: no end-to-end exploit (e.g., OTA abuse, cloud control-plane change, telemetry spoof with operator-side impact); ethical constraints noted but impact remains hypothetical.
- CAI effectiveness unquantified: no baseline vs. human pentester comparison, success rate, time-to-find, false positives, or detection by vendor SOC/cloud defenses.
- CAI safety and robustness unexamined: susceptibility of the CAI agent to prompt injection/data poisoning on-device (vui_service/chat_go) and containment/guardrails are not tested.
- Real-time interference risks unmeasured: resource contention of CAI workloads on RK3588 (CPU, memory, RT scheduling) and effects on control loops/stability are not reported.
- Disclosure and vendor response absent: timelines, remediation status, and patch verification are not provided; reproducibility artifacts (pcaps, configs, decryption scripts) are not released.
- Generalizability uncertain: claims of “most mature security” are not backed by a standardized, multi-vendor benchmark; methodology for cross-vendor scoring is missing.
- Legal analysis high-level: no DPIA-style mapping of data elements to lawful bases, consent UX audits in companion apps, retention/processing purposes, or cross-border transfer mechanisms.
- Mitigations not experimentally validated: concrete hardening steps (broker ACLs, firewalling, DDS Security enablement, cert pinning, telemetry minimization) are not prototyped or benchmarked for efficacy and performance overhead.
Glossary
- Air-gapped facilities: Networks or environments physically isolated from external connections to prevent remote access. "capable of lateral movement within air-gapped facilities."
- Amazon Kinesis SDK: A cloud service and software toolkit for real-time streaming data ingestion and processing. "cloud streaming via Amazon Kinesis SDK"
- Attack surface: The sum of all points where an attacker could try to enter or extract data from a system. "attack surface matrix covering MQTT topic abuse, WebRTC stream hijack, and OTA manipulation pathways."
- Attack vector: A path or means by which an attacker can gain access to a system. "two validated attack vectors"
- auto-reconnect: Automatic re-establishment of network connections after disruption. "with auto-reconnect ensuring continuous surveillance."
- BLE: Bluetooth Low Energy, a wireless technology for short-range, low-power communication. "BLE/Wi-Fi links via upper_bluetooth and chat_go for mobile or app-based control."
- Blowfish-ECB: The Blowfish block cipher used in Electronic Codebook mode, which encrypts each block independently. "Partial reverse engineering of Unitree's proprietary FMX encryption reveal a static Blowfish-ECB layer"
- CAI (Cybersecurity AI): Autonomous AI agents designed to perform cybersecurity tasks such as reconnaissance and exploitation. "a resident Cybersecurity AI (CAI) agent can pivot from reconnaissance to offensive preparation"
- cloud control plane: Centralized cloud services that manage and orchestrate resources and operations. "such as the manufacturer's cloud control plane"
- CycloneDDS: An open-source implementation of the DDS standard for real-time data distribution. "ROS 2 Foxy, CycloneDDS 0.10.2, EOL May 2023"
- Data exfiltration: Unauthorized transfer of data from a system. "continuously exfiltrating multi-modal sensor and service-state telemetry"
- Data sovereignty: The concept that data is subject to the laws and governance structures of the nation where it is collected. "Persistent telemetry violates data sovereignty."
- DDS/RTPS: Data Distribution Service with Real-Time Publish-Subscribe protocol for distributed messaging. "DDS/RTPS for intra-robot publish/subscribe messaging (unencrypted and susceptible to local interception)."
- ECB mode: Electronic Codebook mode of block ciphers; insecure due to pattern leakage. "ECB mode enables pattern analysis attacks and provides no authentication guarantees."
- eMMC: Embedded MultiMediaCard, a type of flash storage commonly used in embedded systems. "Storage: eMMC"
- Entropy (cryptographic): A measure of randomness used to determine strength of keys; lower entropy implies weaker security. "reduces effective entropy to 0 bits"
- FMX encryption: Proprietary dual-layer configuration protection scheme used by Unitree. "Partial reverse engineering of Unitree's proprietary FMX encryption"
- GDPR Articles 6 and 13: European privacy law provisions on lawfulness of processing (Article 6) and information to be provided (Article 13). "creating violations of GDPR Articles 6 and 13"
- glibc rand(): The pseudo-random number generator implementation in the GNU C Library. "parameters matching glibc's rand(): "
- GNSS: Global Navigation Satellite System for positioning and navigation. "GNSS receiver—all publishing to DDS topics on the local network."
- IMU: Inertial Measurement Unit, a sensor that measures acceleration and angular rate. "9-axis IMU"
- IV (Initialization Vector): A non-secret value used to initialize encryption to ensure distinct ciphertexts. "Mode: ECB (no IV), Status: COMPROMISED"
- JST: A family of electrical connectors commonly used for compact electronics. "exposed JST debug connectors"
- JTAG: A hardware interface standard used for debugging and programming integrated circuits. "unpopulated JTAG pads"
- Kerckhoffs's principle: Security should rely on key secrecy, not on the secrecy of the algorithm. "This violates Kerckhoffs's principle—security relies on key secrecy, not algorithm obscurity"
- lateral movement: The technique of moving through a network to access additional resources after initial compromise. "capable of lateral movement within air-gapped facilities."
- LCG (Linear Congruential Generator): A simple pseudo-random number generator based on linear recurrence modulo arithmetic. "Linear Congruential Generator (LCG)"
- LIDAR: Light Detection and Ranging sensor that measures distance using laser light. "LIDAR point clouds (utlidar/cloud)"
- MQTT: A lightweight publish/subscribe messaging protocol for IoT devices. "MQTT on port~17883 for telemetry and OTA coordination with 43.175.228.18 and 43.175.229.18."
- odometry: The use of motion data to estimate position over time. "GPS/GNSS positioning with sub-centimeter odometry tracking"
- OTA (Over-the-Air): Remote update and configuration mechanism delivered over network connections. "for telemetry and OTA coordination"
- penetration testing: Authorized simulated cyberattacks to find security weaknesses. "LLM-powered penetration testing approaches"
- proprioceptive: Internal sensing of a robot’s own joint states and forces. "proprioceptive feedback"
- publish/subscribe: Messaging pattern where senders publish messages and receivers subscribe to topics. "publish/subscribe messaging"
- Real-Time Preemption: Kernel patches enabling deterministic scheduling for real-time operations. "Real-Time Preemption Patches"
- RealSense D435i: An Intel depth camera model with integrated IMU for visual perception. "Intel RealSense D435i depth cameras"
- reconnaissance: The information-gathering phase of a cyber attack to map targets and services. "pivot from reconnaissance to offensive preparation"
- ROS 2 Foxy: A distribution of the Robot Operating System version 2 with specific platform support. "ROS 2 Foxy, CycloneDDS 0.10.2, EOL May 2023"
- SoC: System on Chip, an integrated circuit that includes CPU, memory, and peripherals. "Rockchip RK3588 SoC"
- SSL_write instrumentation: Hooking or monitoring calls to SSL_write to capture encrypted outbound data. "Our SSL_write instrumentation on 9~September~2025 captured a 10-minute telemetry session"
- TLS 1.3: A modern transport layer security protocol version providing encrypted network communication. "establish TLS 1.3 connections"
- trojan horse: A device or software that appears benign but covertly performs malicious actions. "the robot functions as a trojan horse"
- UART: Universal Asynchronous Receiver/Transmitter, a serial communication hardware interface. "accessible UART interfaces operating at 115200 baud"
- voxel mapping: 3D spatial representation using volumetric pixels (voxels). "3D voxel mapping"
- WebRTC: A real-time communication protocol for browser-to-browser audio, video, and data. "WebRTC via webrtc_bridge for media streaming, with TLS certificate verification disabled in the shipped client."
- WebSocket: A protocol enabling persistent, full-duplex communication over a single TCP connection. "maintains a WebSocket connection to 8.222.78.102:6080 with SSL verification disabled"
- XOR: Exclusive OR operation used in cryptography for masking or combining data with keys. "High byte of each LCG state used as XOR key"
Collections
Sign up for free to add this paper to one or more collections.