- The paper presents a hierarchical algorithm integrating connectivity-aware decomposition and vehicle routing formulation to optimize multi-robot coverage.
- It demonstrates reduced travel distances and minimized overlap through adaptive sensor feedback in both simulation and real-world experiments.
- Extensive ablation studies show that applying connectivity-aware decomposition and global tour planning significantly enhances operational metrics.
Multi-CAP: A Multi-Robot Connectivity-Aware Hierarchical Coverage Path Planning Algorithm for Unknown Environments
Introduction
The paper "Multi-CAP: A Multi-Robot Connectivity-Aware Hierarchical Coverage Path Planning Algorithm for Unknown Environments" (2509.14941) addresses the complex problem of coordinating multiple robots in unknown environments for optimal coverage. Multi-Robot Coverage Path Planning (CPP) is critical in applications like surveillance, cleaning, and inspection. The paper proposes a hierarchical algorithmic framework, Multi-CAP, which enhances the efficiency of path coverage by leveraging connectivity-aware decomposition and hierarchical task allocation.
Algorithmic Framework
The Multi-CAP algorithm is built on the premise of dividing an unknown environment into manageable subareas, which are represented in an adjacency graph. This graph evolves as robots explore, updating dynamically to reflect the environment's topology and connectivity. The algorithm frames the subarea assignment as a Vehicle Routing Problem (VRP), optimizing for non-overlapping tours and minimizing path redundancy and inter-robot conflicts. Each robot receives a unique assignment and employs adaptive local strategies to refine its path based on real-time sensor feedback.
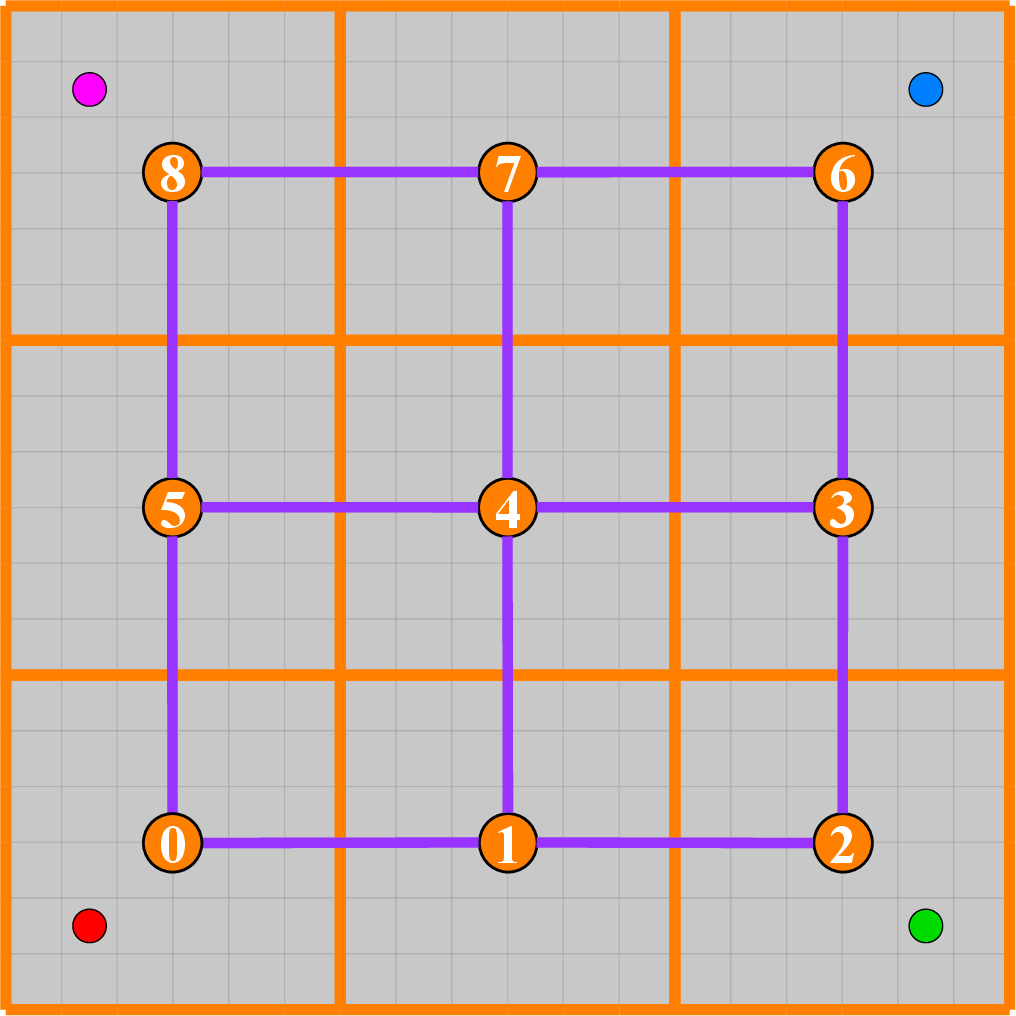
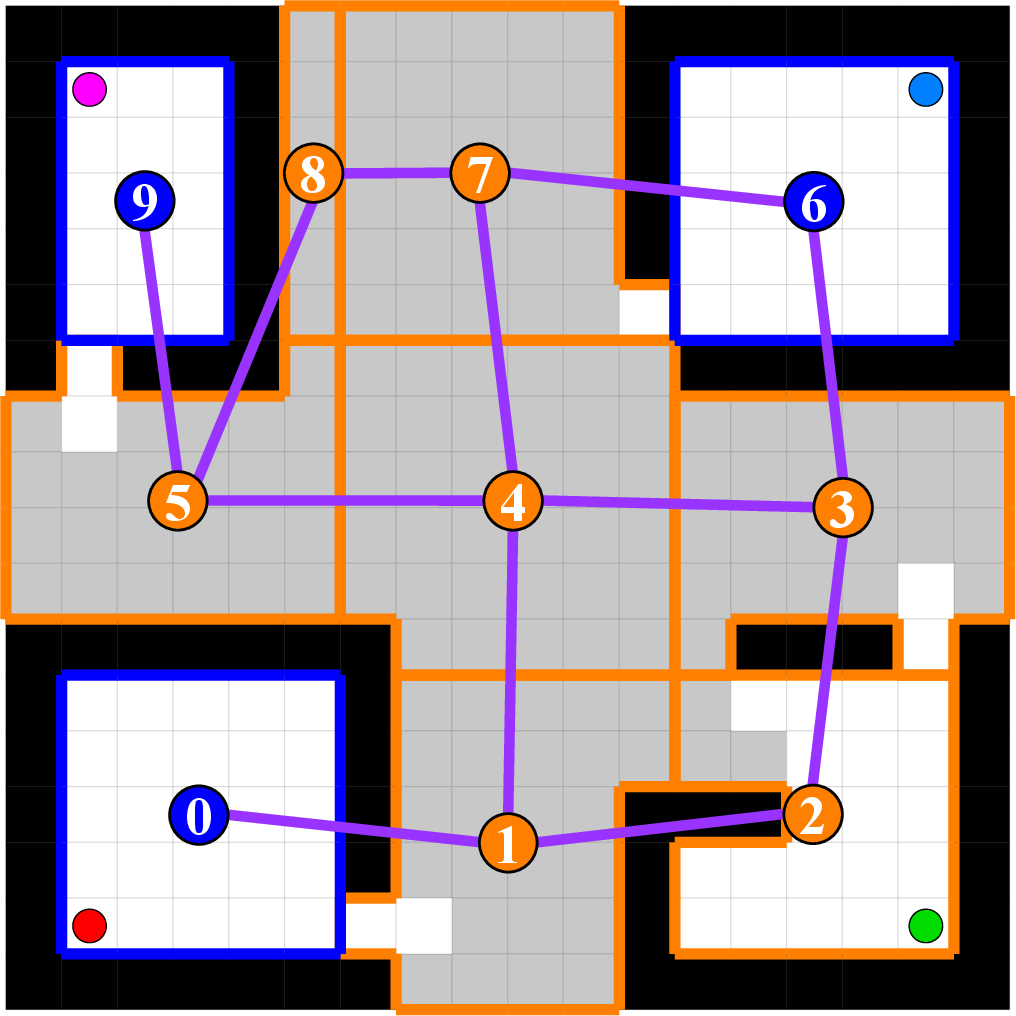
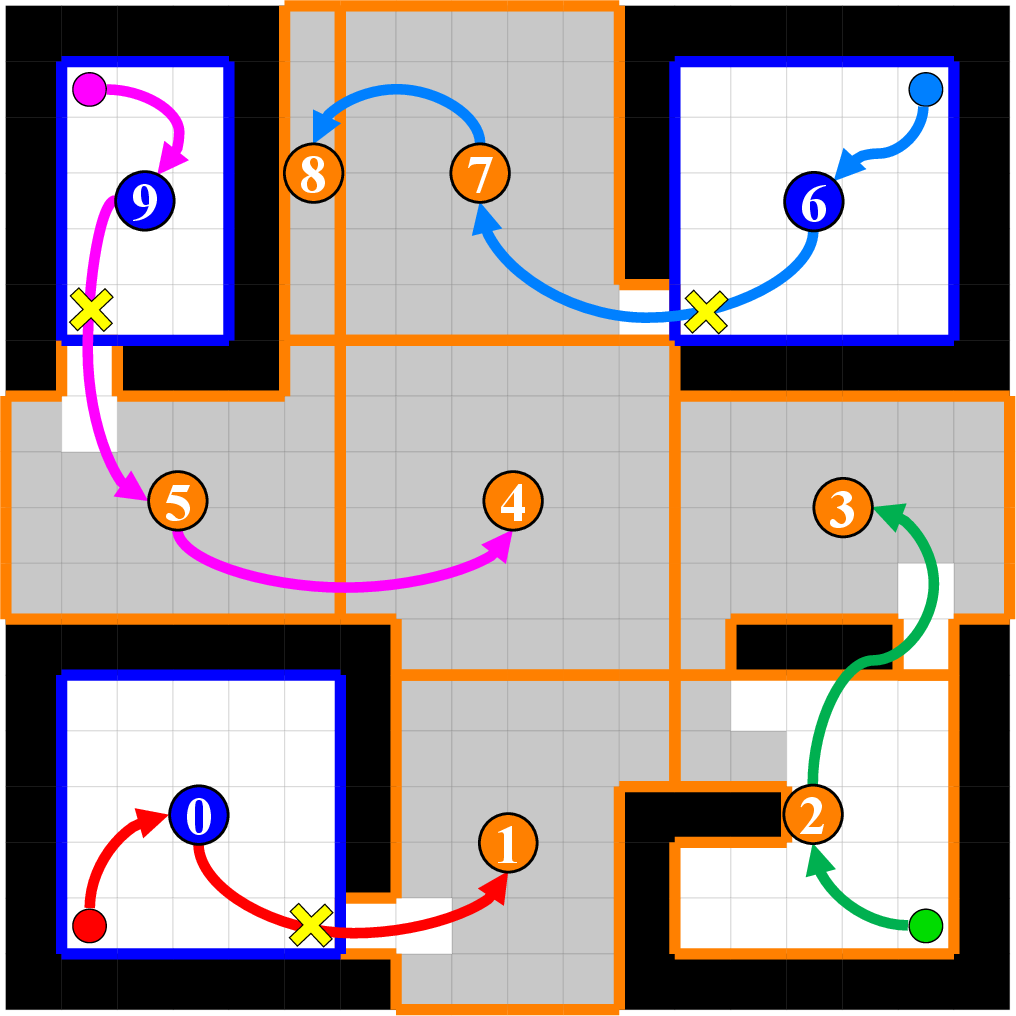
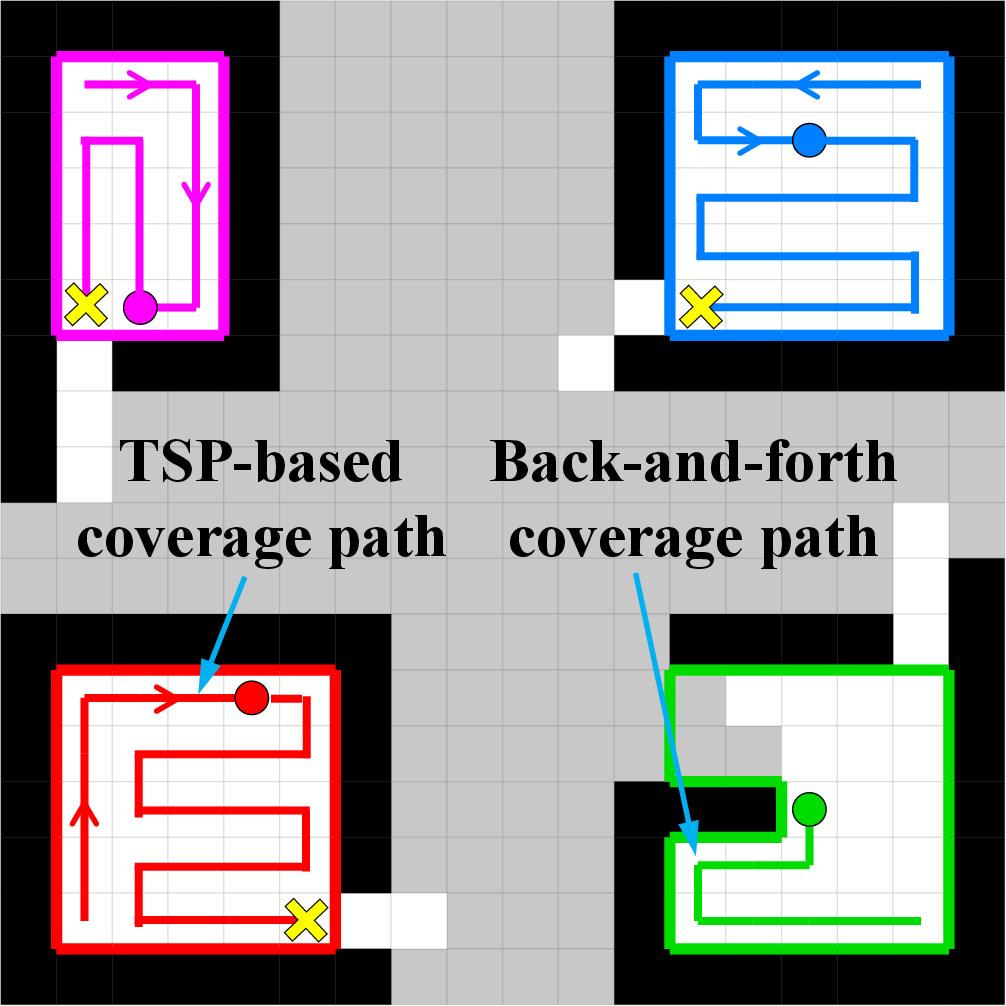

Figure 1: Illustration of the Multi-CAP algorithm. Each coarse cell defines an initial subarea corresponding to a graph node, and the graph is incrementally updated using sensor feedback.
Simulation and Experimental Validation
Through extensive simulations conducted in Gazebo, and supported by experiments in real-world environments like warehouses and office-like scenes, the paper demonstrates the superiority of Multi-CAP in several key metrics: coverage time, path length, and overlap ratio. Multi-CAP's hierarchical approach results in reduced travel distances and minimized overlap in coverage, outperforming conventional methods like DecPPCPP and APFCPP, which either model robots as dynamic obstacles or use potential fields for separation.
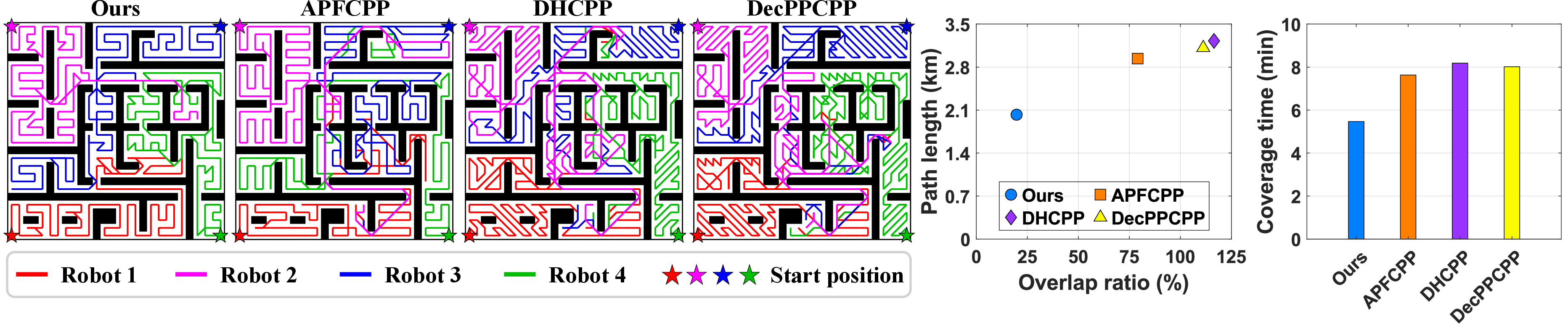
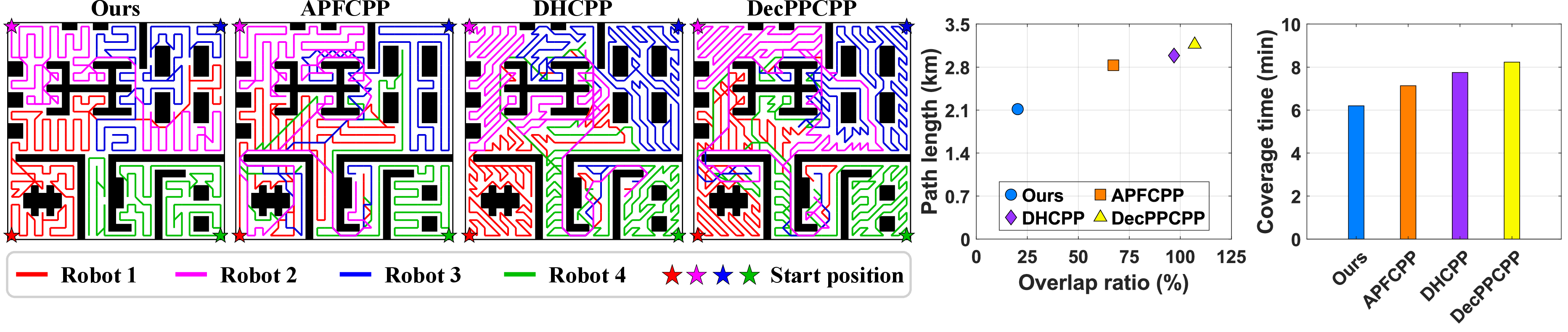
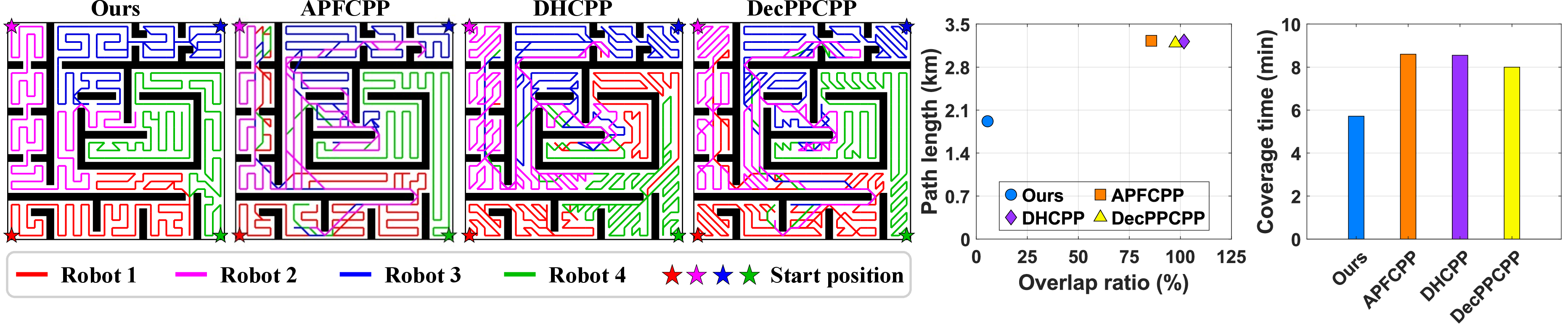
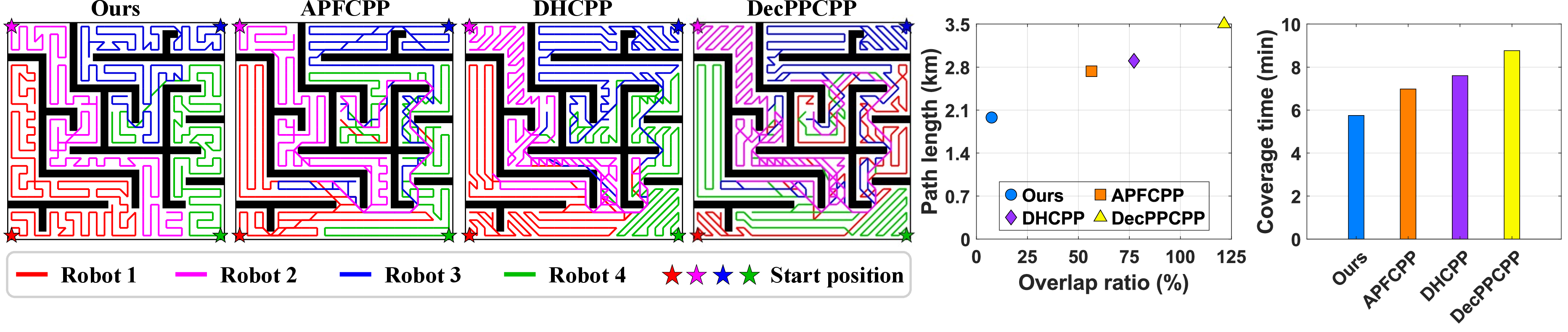
Figure 2: Simulation experiments for Multi-robot CPP in four scenes.
The robustness of Multi-CAP is further highlighted in scenarios with complex layouts and dense obstacles, showcasing its ability to maintain coherent coverage paths (Figure 3).
Ablation Studies
Detailed ablation studies are provided to discern the contributions of core components such as connectivity-aware decomposition and global tour planning. The connectivity-aware decomposition was shown to significantly mitigate redundant coverage arising from disconnected subareas, while the global tour planning reduced excessive transitions by efficiently sequencing the coverage order of subareas.

Figure 4: Quantitative results of the ablation studies on connectivity-aware decomposition and global tour planning.
Real-World Applications
The real-world experiments reinforce the applicability of Multi-CAP, where it consistently yields superior operational metrics across various structured environments. The algorithm's adaptive coverage capability ensures optimal performance even under realistic operational constraints such as limited communication and dynamic environmental changes (Figure 5).

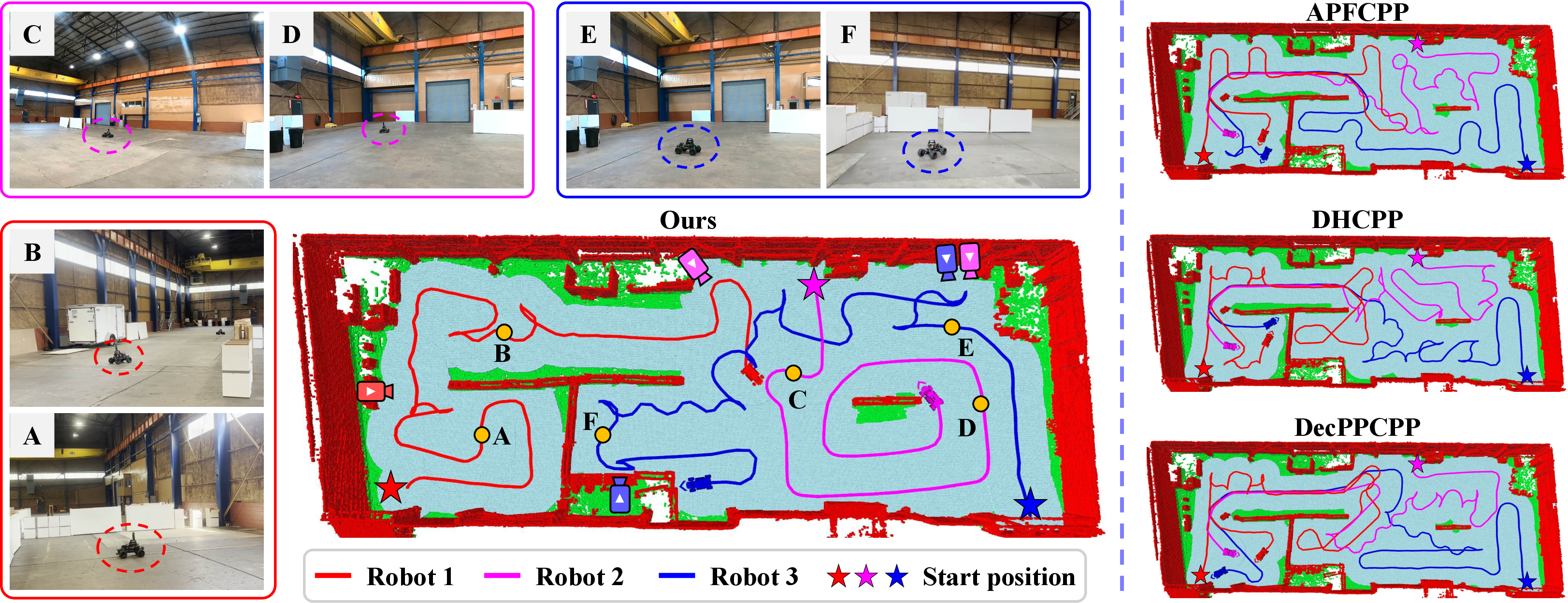

Figure 5: Real-world experiments for Multi-robot CPP in two scenes.
Conclusion
Overall, Multi-CAP is a substantial contribution to multi-robot coverage path planning, offering both theoretical advancements and practical solutions. It effectively integrates global coordination with adaptive local execution, enhancing the capabilities of multi-robot systems in unknown and dynamic environments. Future research directions include exploring deeper integration with communication-constrained settings and applications to non-holonomic robot configurations.