- The paper presents MDCPP, which integrates dynamic speed adjustments and predictive workload estimation to improve multi-robot coverage efficiency.
- It employs Gaussian mixture models and capacity-constrained Voronoi diagrams to dynamically assign tasks and reduce completion time.
- Simulations demonstrate significant reductions in path length and time, marking an advancement over traditional static-velocity methods.
Multi-robot Dynamic Coverage Path Planning for Workload Adaptation
Introduction to MDCPP
The paper introduces a novel algorithm, Multi-robot Dynamic Coverage Path Planning (MDCPP), aimed at solving the issues inherent in Multi-robot Coverage Path Planning (MCPP). Unlike conventional methods that assume constant velocity for robots, MDCPP allows for dynamic speed adjustments, which better suits real-world applications where workload distribution can be uneven, and conditions may vary. The algorithm improves coverage efficiency by estimating workloads with Gaussian mixture models (GMM) and distributing tasks via capacity-constrained Voronoi diagrams, with a distributed approach suitable for range-constrained robotic networks.
The focus of the paper is on overcoming limitations of static-velocity assumptions in traditional CPP approaches. The research formalizes scenarios such as environmental surveys where UUVs dynamically adjust their speed for varying tasks like capturing images or identifying coral species. The goal includes adaptive task assignment based on predicted workloads, optimizing the time to completion through the use of GMM-based target predictions, and novel dynamic partitioning techniques.
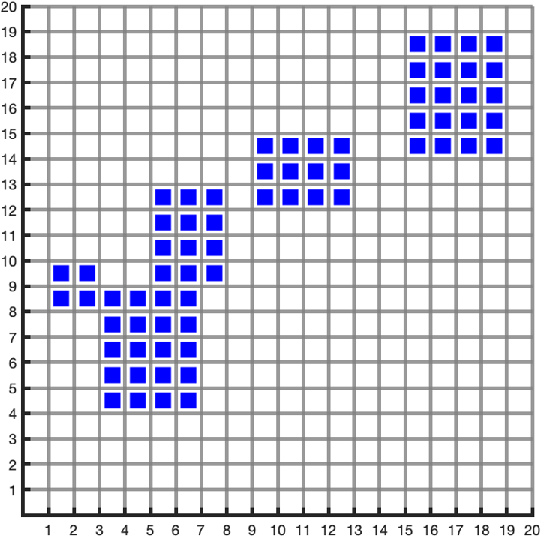
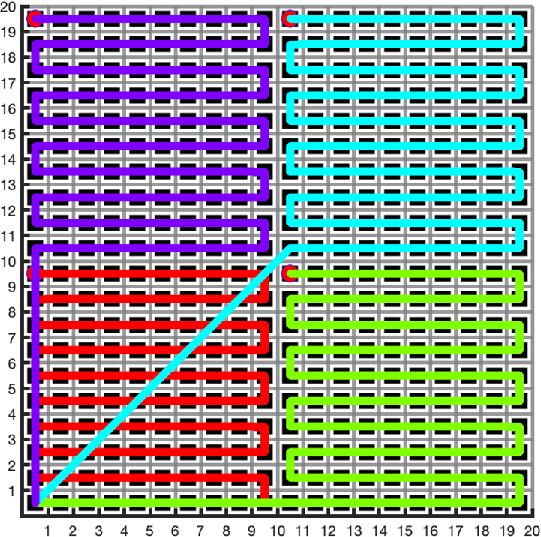
Figure 1: The simulation environment meshed with 20\times20 cells. Static targets are located inside blue cells.
The MDCPP Algorithm
Estimating Target Distribution
MDCPP models target distribution as a GMM, estimating using sparse observation data. Key steps include filtering high-density observations, clustering using K-means, and scoring clustering outcomes for optimal fitting. The iterative testing determines the best variance estimates to align predicted models with actual environmental conditions.
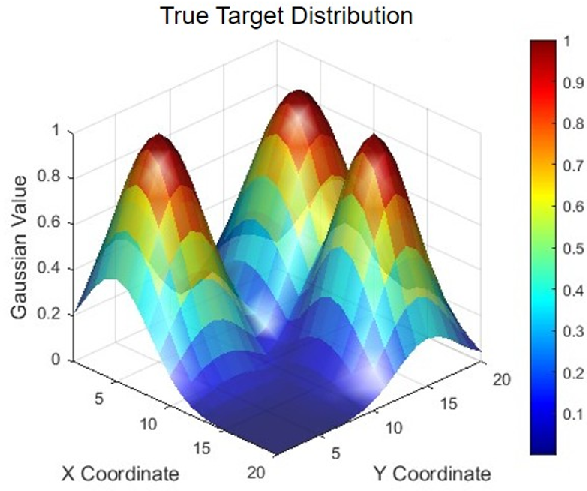
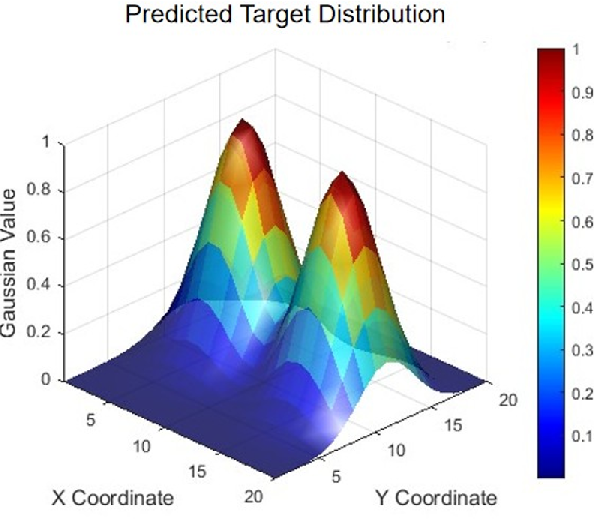
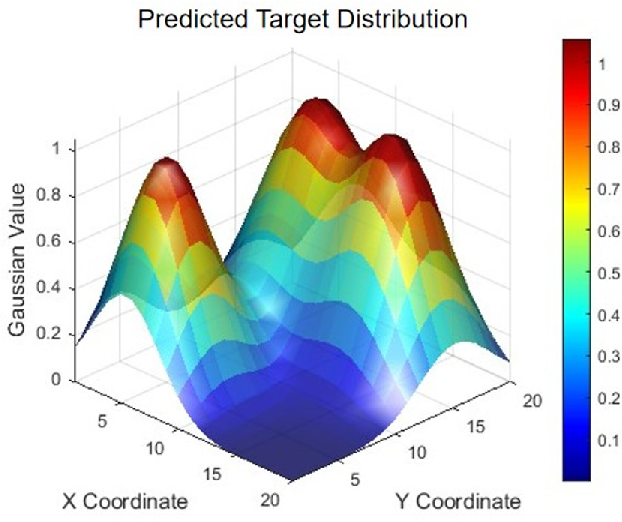
Figure 2: Ground truth and predicted target distributions.
Dynamic Cell Assignment
The dynamic cell assignment is crucial for optimizing robot deployment. MDCPP utilizes iterative reassignment aligned with observed conditions and robot capabilities. This approach significantly reduces coverage time by facilitating a balanced distribution of workloads among robots, dynamically adapted as tasks progress.
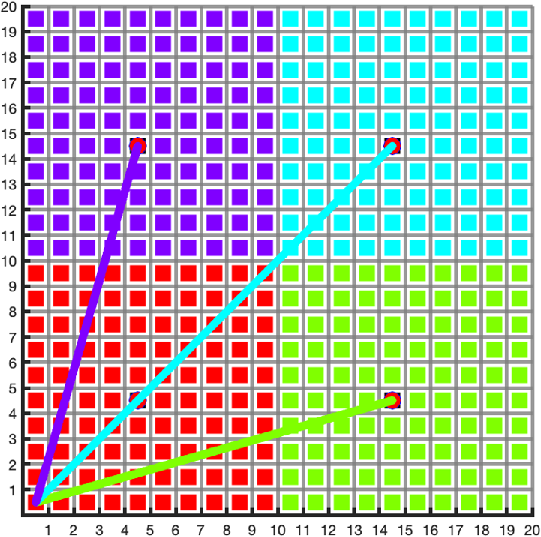
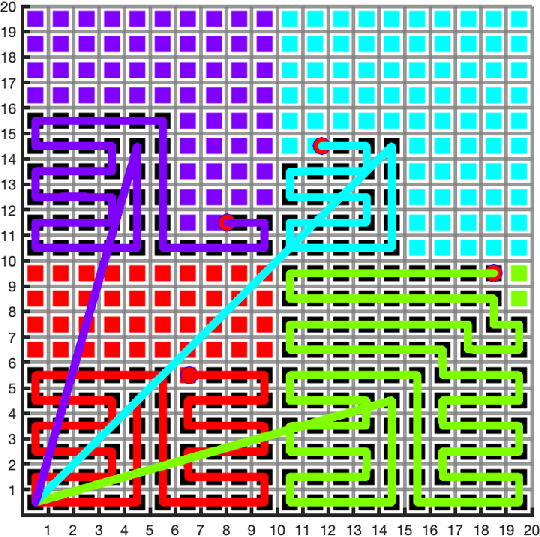
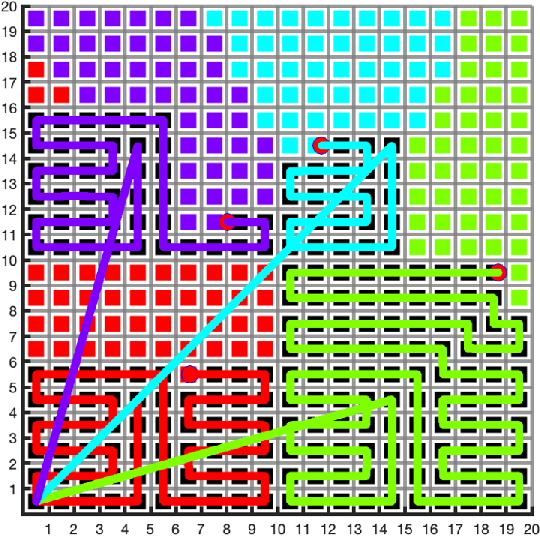
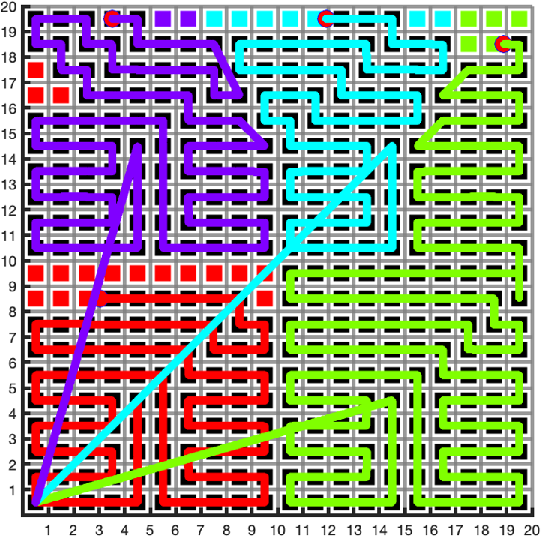
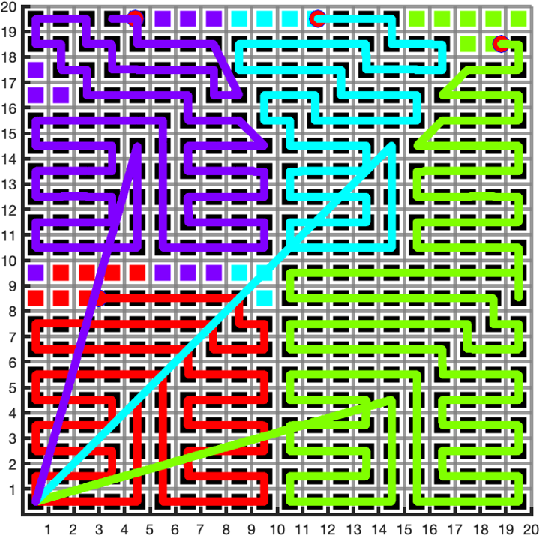
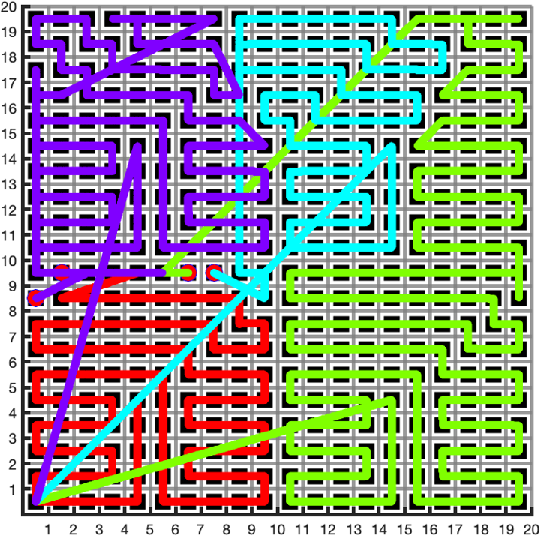
Figure 3: Coverage procedures over a single trial, highlighting real-time cell assignments and robot paths.
Path Planning
MDCPP incorporates a revised version of the TSP solution for path optimization, ensuring that each robot minimizes its travel cost while covering assigned areas fully. This requires real-time reassessment and replanning as conditions evolve, facilitating rapid responsiveness to environmental changes and workload variances.
Implications and Simulations
The MDCPP showcases significant improvements in coverage efficiency and adaptability compared to traditional static methods and dynamic approaches without predictive analytics. Simulation results indicate substantial decreases in completion time and path length, particularly advantageous in heterogeneous robotic teams.
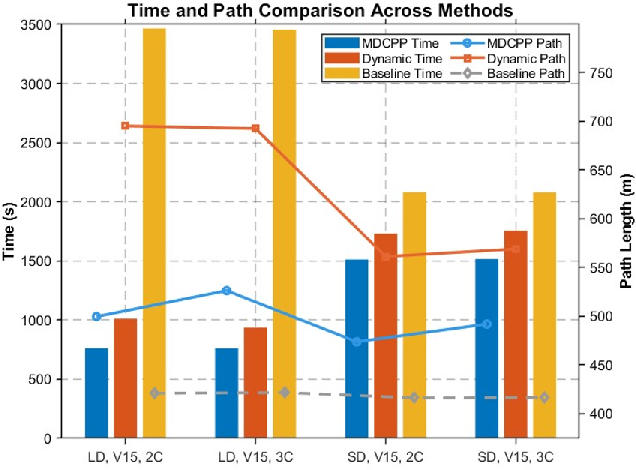
Figure 4: Quantitative time and path length comparisons across different methods and scenarios.
Conclusion
The MDCPP algorithm marks a significant advancement in MCPP by integrating dynamic speed adjustments, predictive workload estimation, and optimized path planning. This approach not only enhances practical application efficiency but also provides a robust framework for future autonomous exploration and task management scenarios in dynamic environments. Future research may extend MDCPP's applicability to more complex, non-convex task spaces and incorporate advanced machine learning models for further operational optimizations.