- The paper proposes a transformed error-state Kalman Filter that achieves state-independent observability, addressing inconsistencies in VINS.
- It introduces a time-varying linear transformation that enhances covariance propagation efficiency and reduces computational complexity.
- Simulations and experiments show that T-ESKF improves RMSE and NEES metrics, proving its robustness against noise and biases.
The "T-ESKF: Transformed Error-State Kalman Filter for Consistent Visual-Inertial Navigation" introduces a methodology to enhance consistency in visual-inertial navigation systems (VINS) by transforming the error-state of the traditional Error-State Kalman Filter (ESKF). This paper addresses inconsistency issues arising from observability mismatches, using a novel transformation-based approach to ensure observability independence from state linearization points.
Observability in VINS
VINS often struggle with maintaining consistency due to navigation tasks' inherent nonlinearities and observability mismatches particularly when filter-based methods are employed. These systems traditionally handle observability by assuming erroneous global rotations as observable, leading to inconsistency in state estimation.
Unobservable Subspace
The unobservable subspace of a VINS system traditionally depends on the chosen linearization point and can lead to erroneous observability assumptions. The paper elucidates how the transformed error-state system via T-ESKF makes this unobservable subspace state-independent, thus preserving the correct observability properties against variations in linearization points.
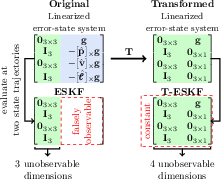
Figure 1: The unobservable subspace of the original system depends on the state, while that of the transformed system is state-independent.
T-ESKF Methodology
The proposed T-ESKF ensures consistency by linearly transforming the error-state such that the transformed error-state system's unobservable subspace is independent of the original state. This involves designing a time-varying linear transformation applied to the system's error state.
The transformation matrix T is meticulously crafted to neutralize the state-dependent variability in error-system observability. It is constructed such that the transformation yields a state-independent observability matrix, thereby directly addressing inconsistencies caused by past approaches.
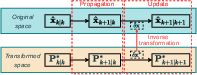
Figure 2: Pipeline of T-ESKF. It propagates and updates the covariance estimates in the transformed space.
Efficient Propagation
Leveraging this transformation also enhances the covariance propagation's computational efficiency. This reduction stems from a reduced-dimensional matrix multiplication during the update steps, making T-ESKF more computationally feasible.
Simulation and Experimental Evaluation
The paper conducts extensive simulations and experiments comparing T-ESKF with state-of-the-art estimators like ESKF, FEJ-ESKF, and RI-EKF across a collection of datasets and real-world scenarios. Several metrics such as Root Mean Square Error (RMSE) and Normalized Estimation Error Squared (NEES) were utilized to gauge performance enhancements under various conditions.
Numerical Results and Real-World Validation
The RMSE and NEES results establish that T-ESKF provides comparable, if not superior, accuracy and consistency over the alternative methods. Especially when noise and biases are introduced, T-ESKF demonstrates resilience and robustness indicative of its improved state observability.
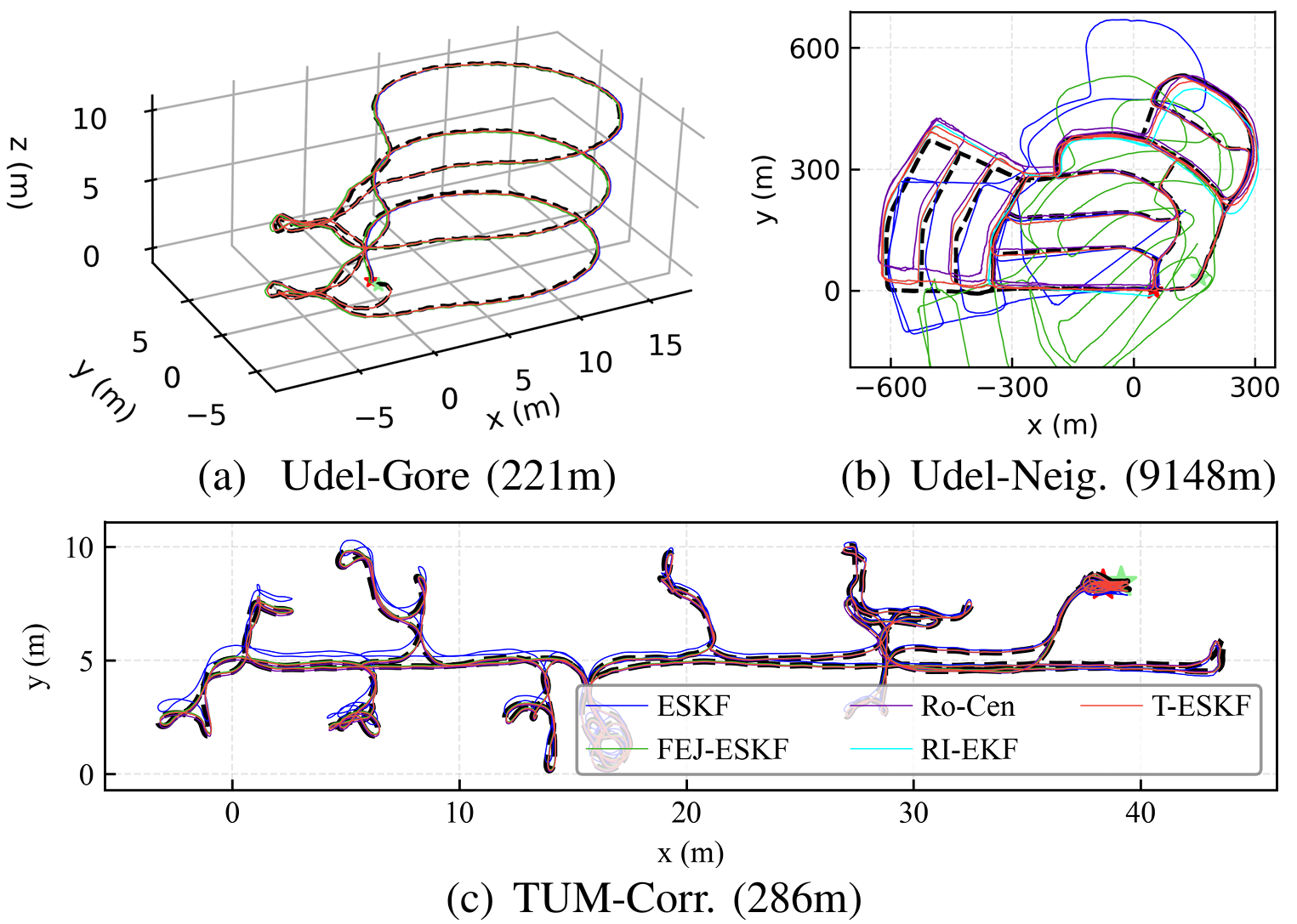
Figure 3: Simulated trajectories (black dashed lines) with green and red stars marking the starting and ending points.
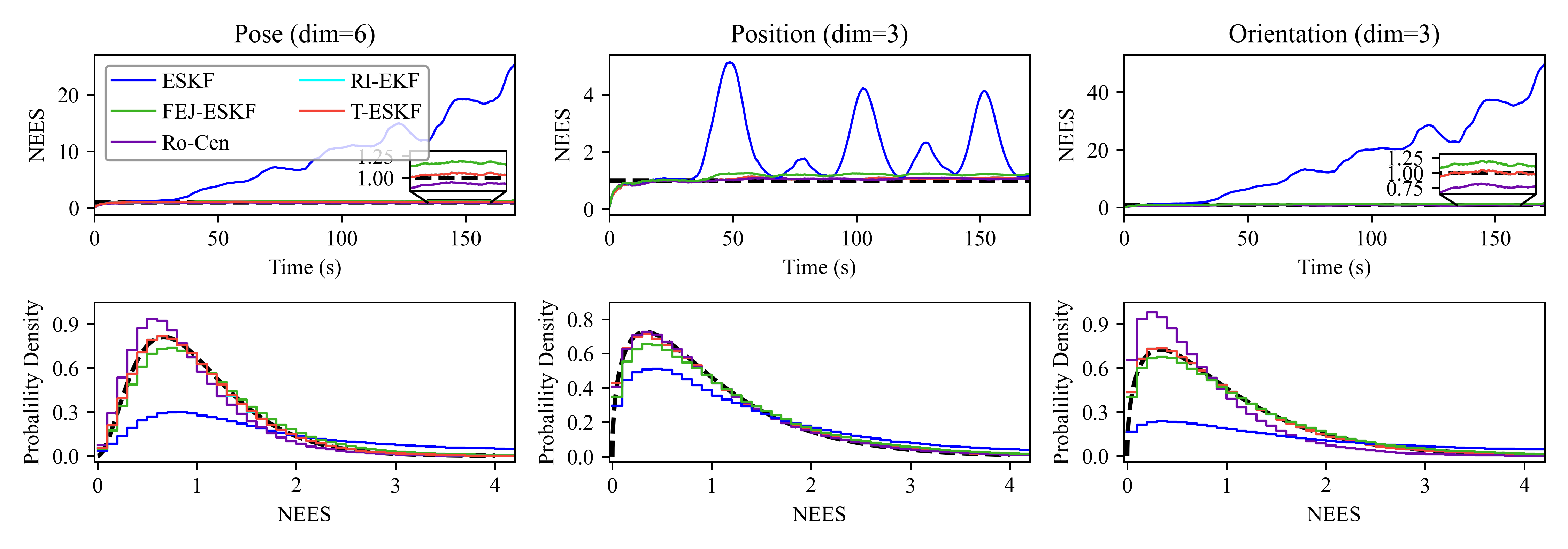
Figure 4: The NEES of 1000 Monte-Carlo simulation runs. The upper three subfigures show the average NEES over time; the lower three subfigures depict the frequency distribution of NEES.
Implications and Future Work
The improved consistency in VINS achieved by T-ESKF paves the way for more reliable navigation systems across applications with significant state variances, such as robotics and augmented reality. Its method of making observability state-independent presents a novel perspective on managing intrinsic estimation inconsistencies prevalent in navigation systems.
Future work could focus on applying the transformation methodology to other types of Kalman Filters and exploring its integration into more complex systems involving multiple sensor types or operating in dynamic environments with more complex state interactions.
Conclusion
The T-ESKF method offers a consistent and computationally feasible solution to VINS’s traditional inconsistency problems by altering the framework for how observability is maintained and quantified. The method’s robustness against high variances and noise suggests its utility in numerous applications ranging from autonomous vehicles to advanced reality systems.