- The paper introduces HUSKY, a framework that integrates analytical kinematics with phase-aware reinforcement learning for dynamic humanoid skateboarding.
- It employs a modular control architecture featuring adversarial motion priors for pushing, physics-guided lean-to-steer for turning, and trajectory-guided transitions for mounting and dismounting.
- Simulations and real-world experiments demonstrate 100% task success, robust heading control, and adaptability across varied skateboard dynamics.
HUSKY: A Physics-Aware Whole-Body Control Framework for Humanoid Skateboarding
The presented work introduces HUSKY, a comprehensive framework for enabling dynamic skateboarding in humanoid robots through physics-aware, learning-based whole-body control. Humanoid skateboarding involves non-holonomic constraints, underactuation, and tightly coupled multi-contact dynamics, placing it substantially beyond the complexity of conventional humanoid whole-body control tasks. The robot must master propulsion, balance, and lean-to-steer maneuvers on a moving, compliant support base (the skateboard) while maintaining robust phase transitions between dynamically distinct pushing and steering behaviors.
Central to HUSKY is a rigorous modeling of the mechanical coupling between the robot and skateboard. The system’s derivation establishes an explicit kinematic relationship between the skateboard deck’s tilt angle and the truck steering angle, forming the foundation of lean-to-steer behavior:
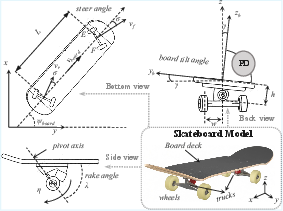
Figure 1: The skateboard kinematic structure and its lean-to-steer relationship, linking tilt, truck steering, and rake angles, underpins effective turning control.
This coupling is represented by the equality tanσ=tanλ⋅sinγ, where σ is the steering angle, λ is the truck’s rake angle, and γ is the board tilt. This analytical model directly links body motion to the support platform’s motion and is pivotal in integrating physics priors into the control policy.
HUSKY formulates skateboarding as a hybrid dynamical system, explicitly modeling the two phase modes: (1) pushing—one foot on the ground, generating forward motion, (2) steering—both feet on-board, controlling heading through body tilt. Transitions between phases are characterized by discrete contact topologies, demanding smooth, dynamically consistent motion bridging.
The RL problem is framed with phase-aware reward functions, phase indicators, and privileged state variables (observable to the critic), including proprioceptive histories, skateboard states (pose, velocity, tilt, and contact forces), and temporal phase markers. A modular reward structure ensures precise velocity and heading tracking, penalized contact violations, and regularization.
Modular Control Architecture
Human-Like Pushing via Adversarial Motion Priors
Traditional reference tracking enforces rigid motion that fails under environmental variability or varied command velocities. Instead, HUSKY utilizes Adversarial Motion Priors (AMP): a discriminative network distinguishes between reference human motions and agent rollouts, shaping policy behavior to maximize realism and robustness in the propulsion phase.
Physics-Guided Lean-to-Steer Strategy
Steering exploits the analytical coupling between lean and truck steering. HUSKY formalizes a physics-guided reference for the optimal board tilt required to match a commanded heading over a finite horizon. The reward commingles heading error with deviation from the tilt reference, thus ensuring learning is physically grounded and efficient, greatly widening the system’s steering operation domain compared to unconstrained black-box learning.
Trajectory-Guided Transitions
To avoid local optima and mode collapse, HUSKY employs a trajectory planning mechanism for contact-phase transitions. Key body frames are interpolated (using Bézier and SLERP) between current and canonical future poses, providing dynamic, state-dependent intermediate references. This dense, continuously differentiable guidance empowers the policy to reliably learn high-fidelity stepping and mounting/dismounting transitions without overfitting to brittle motion scripts.
Sim-to-Real Transfer Mechanisms
Physics consistency across simulated and real deployments is ensured through two mechanisms. First, passive skateboard tilt dynamics are identified analytically via roll decay tests, allowing precise matching of torsional stiffness and damping parameters in simulation. Second, domain randomization is profusely applied to physical parameters: mass, friction, and initial state, significantly increasing robustness to real-world variation and systematic model-plant mismatch.
Experimental Evaluation
Simulation Results: HUSKY achieves 100% task success rate, lowest velocity and heading errors, and optimal contact phase consistency, outperforming all ablation baselines. AMP is confirmed superior for pushing; physics-guided steering is indispensable for precise heading control; and removing trajectory guidance results in catastrophic phase transition failures and high contact violations.
Steering Analysis: Experiments visualize the turning trajectories: systems omitting the explicit tilt-steer constraint are incapable of true turning—attaining only limited heading change through marginal slippage or compensation, while policies using physics-guided tilt achieve comprehensive heading coverage with minimal error.
Phase Transition Analysis: Without detailed transition rewards, policies are unable to discover the foot mounting phase, instead degenerating to push-only motion even under mixed initialization, demonstrating the necessity of the introduced transition guidance.
Real-World Performance: HUSKY demonstrates generality and reliability, executing seamless full skateboarding cycles, mounting/dismounting, robust heading tracking, and continuous multi-phase operation on the Unitree G1 robot, both indoors and outdoors. The system generalizes to varied skateboard geometries, provided the physical parameters are accurately identified.
Role of Physical Parameter Identification
Evaluation across boards with distinct tilt compliance demonstrates that accurate modeling is critical: misidentified stiffness or damping leads to mounting failures (when the board is stiffer in reality than in simulation) or to instability (when the real board is softer than modeled), causing over-leaning and loss of balance. This underscores the importance of precise plant identification for sim-to-real transfer, especially in tasks that are highly sensitive to robot-environment interaction compliance.
Theoretical and Practical Implications
HUSKY rigorously advances the integration of analytic models and end-to-end learning, demonstrating that deeply physics-aware modularization—rather than monolithic “black-box” control—achieves superior performance and reliability in underactuated, multi-contact tasks. The explicit exploitation of holonomic and non-holonomic constraints, phase-structured policies, and privileged critic knowledge form a blueprint for future legged robot control on dynamic platforms and mobile support bases.
Furthermore, the tight coupling of RL with adversarial priors and transitional trajectory optimization presents a template translatable to other hybrid contact tasks (e.g., humanoid parkour, board sports, or tool use).
Figure 1: The kinematic structure highlights the coupling underpinning lean-to-steer behavior in humanoid skateboarding.
(Figure 2)
Figure 2: Overview of the HUSKY framework, showing phase-wise decomposition: AMP-based pushing, physics-consistent steering, and trajectory-guided transitions.
(Figure 3)
Figure 3: Steering trajectories under different policy designs: explicit coupling vastly improves turn execution.
(Figure 4)
Figure 4: Training curves without transition guidance show collapse to trivial solutions; with HUSKY, phase transitions are learned effectively.
(Figure 5)
Figure 5: Transition trajectory analysis: the humanoid smoothly and consistently synchronizes foot placement and posture during mounting/dismounting.
(Figure 6)
Figure 6: Real-world experiments: accurately identified board mechanics are critical for successful mounting and heading control.
Future Directions
Key limitations include the lack of exteroceptive perception (onboard vision remains largely unused due to limited FOV and state estimation capabilities), and all experiments remain confined to flat, unstructured environments. Extending HUSKY to onboard perception-driven control and to complex, non-planar terrains (as encountered in skateparks or acrobatic use) is an immediate next step. Moreover, integrating richer, context-adaptive motion priors (beyond human demonstration datasets) will be necessary for transferring to high-performance, robust control in highly variable, real-world outdoor settings.
Conclusion
HUSKY constitutes a robust, physics-grounded, and modularly organized RL framework for high-dexterity humanoid skateboarding, verified both in high-fidelity simulation and on real-world platforms. By analytically coupling body control to platform dynamics, systematically decomposing complex hybrid tasks, and enforcing smooth contact transitions, HUSKY sets a new standard for the integration of analytic modeling and reinforcement learning in underactuated, non-holonomic humanoid locomotion. This approach extends naturally to other high-agility, dynamic robot–platform interaction domains.