Learning Force-Regulated Manipulation with a Low-Cost Tactile-Force-Controlled Gripper
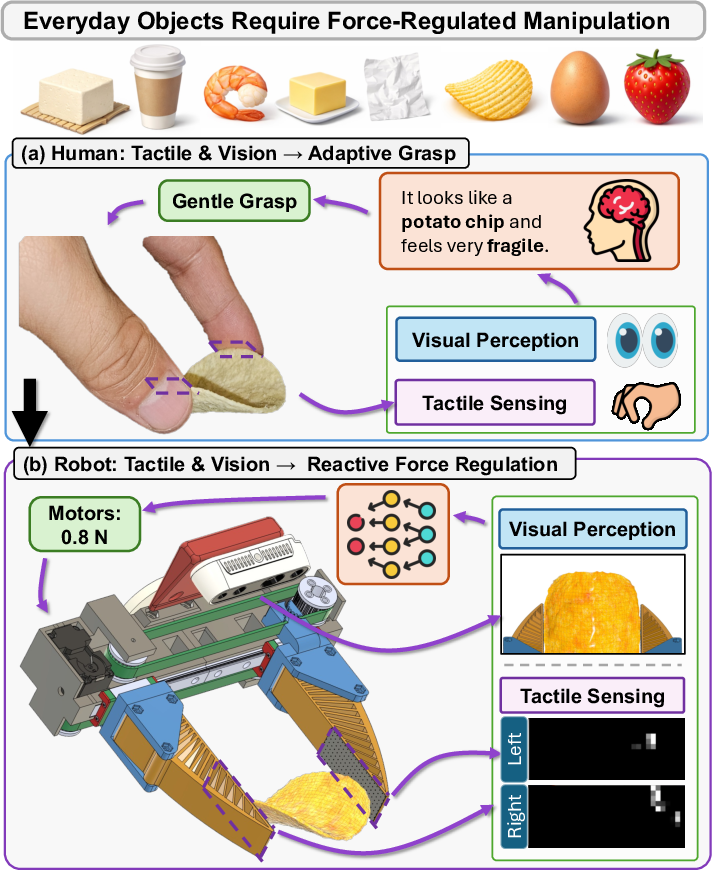
Abstract: Successfully manipulating many everyday objects, such as potato chips, requires precise force regulation. Failure to modulate force can lead to task failure or irreversible damage to the objects. Humans can precisely achieve this by adapting force from tactile feedback, even within a short period of physical contact. We aim to give robots this capability. However, commercial grippers exhibit high cost or high minimum force, making them unsuitable for studying force-controlled policy learning with everyday force-sensitive objects. We introduce TF-Gripper, a low-cost (~$150) force-controlled parallel-jaw gripper that integrates tactile sensing as feedback. It has an effective force range of 0.45-45N and is compatible with different robot arms. Additionally, we designed a teleoperation device paired with TF-Gripper to record human-applied grasping forces. While standard low-frequency policies can be trained on this data, they struggle with the reactive, contact-dependent nature of force regulation. To overcome this, we propose RETAF (REactive Tactile Adaptation of Force), a framework that decouples grasping force control from arm pose prediction. RETAF regulates force at high frequency using wrist images and tactile feedback, while a base policy predicts end-effector pose and gripper open/close action. We evaluate TF-Gripper and RETAF across five real-world tasks requiring precise force regulation. Results show that compared to position control, direct force control significantly improves grasp stability and task performance. We further show that tactile feedback is essential for force regulation, and that RETAF consistently outperforms baselines and can be integrated with various base policies. We hope this work opens a path for scaling the learning of force-controlled policies in robotic manipulation. Project page: https://force-gripper.github.io .
Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
What this paper is about (the big idea)
The paper explains how to help robots handle delicate, everyday objects—like chips, tofu, or cherry tomatoes—without breaking or dropping them. Humans do this by feeling and quickly adjusting how hard we squeeze. The authors built a low-cost robot gripper that can feel touch and directly control how much force it applies. They also created a smarter control method so the robot can react fast during contact, similar to human reflexes.
The main questions the paper asks
- Can a cheap, simple gripper control force precisely enough to handle fragile objects?
- Does directly controlling force (how hard to squeeze) work better than just controlling position (how far the fingers close)?
- Do touch sensors (tactile feedback) actually help the robot choose the right force?
- Can a fast, reflex-like force controller make robots more reliable at gentle tasks?
What they built and how it works
The hardware: a low-cost “feeling” gripper
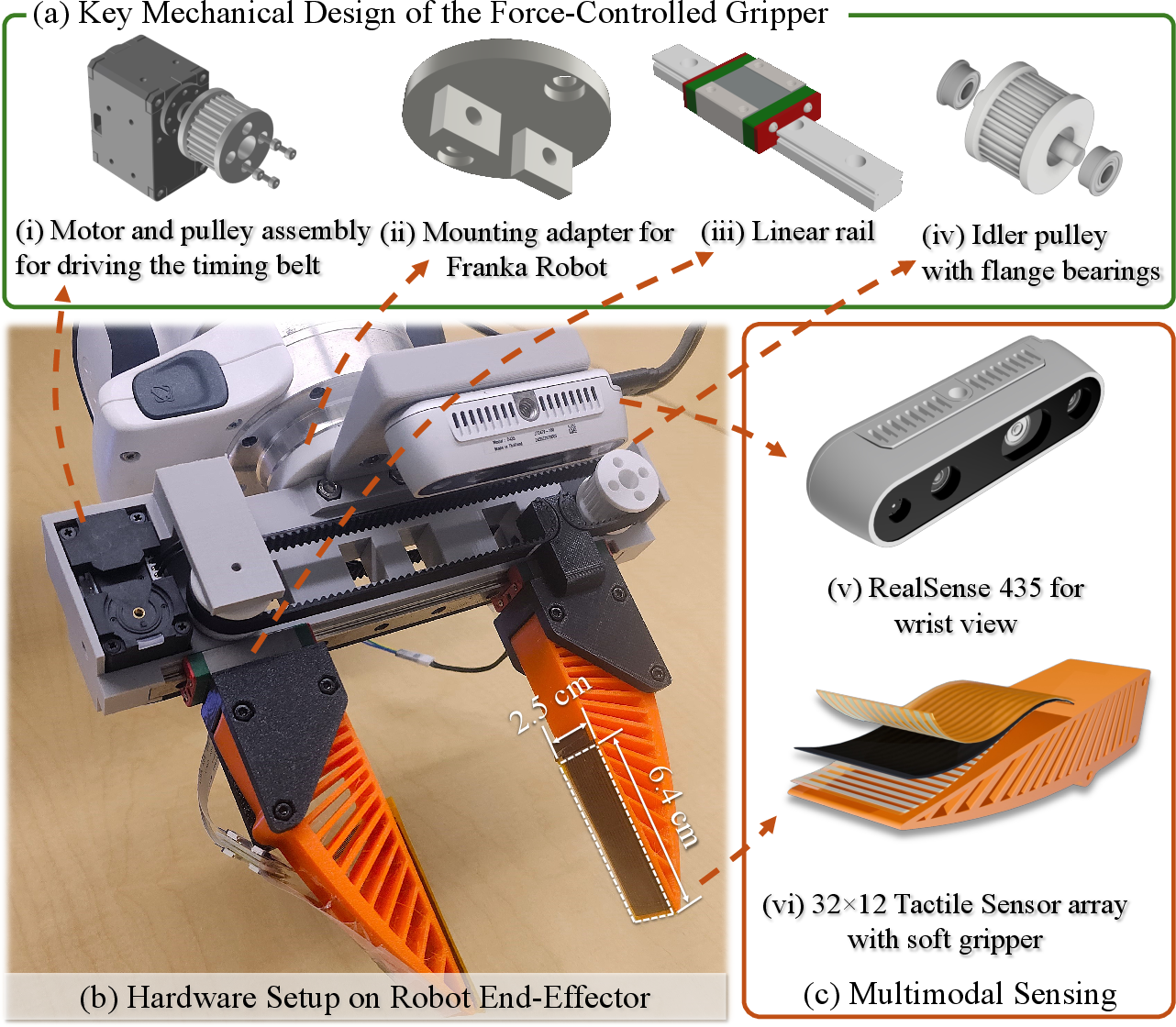
- The team designed TF-Gripper, a 3D‑printed robot gripper that costs about $150.
- It can squeeze objects with a wide, gentle-to-strong range (about 0.45 to 45 newtons), enough to handle soft foods or small tools.
- It has soft fingertips with touch sensors that feel contact and pressure, plus a small camera near the wrist to see up close.
- It uses a belt-and-pulley mechanism driven by two motors, which makes the squeezing force consistent and predictable across many robots.
Think of it like a pair of robotic fingers that can “feel” and squeeze gently—like holding a chip without snapping it.
The data collection tool: recording human “squeeze”
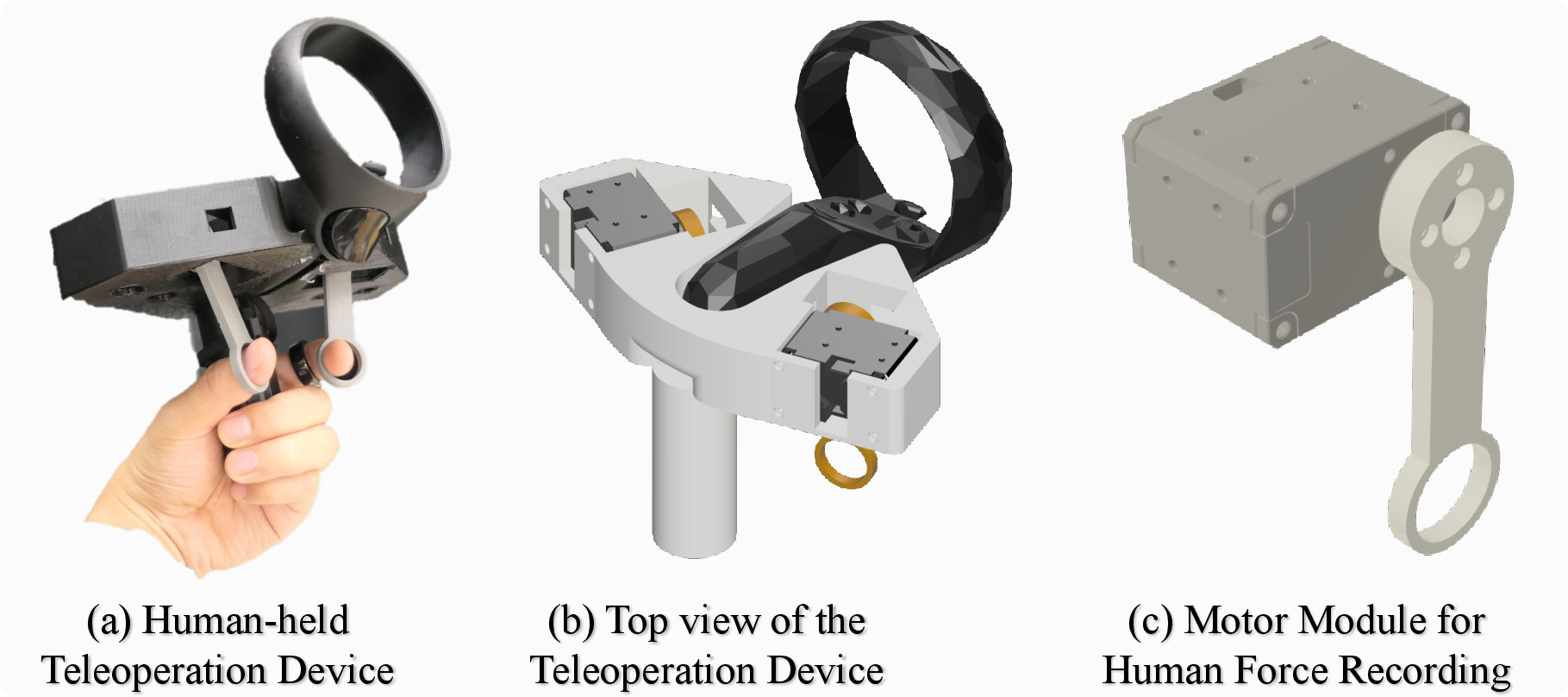
- They built a simple teleoperation device (under $100) with finger rings that push back like a spring.
- As a human controls the robot’s hand movement (with a VR controller), the rings measure how hard the person squeezes and send that exact force to the gripper.
- This lets the robot learn from real human examples of how much force to use.
The control method: splitting “where to move” from “how hard to squeeze”
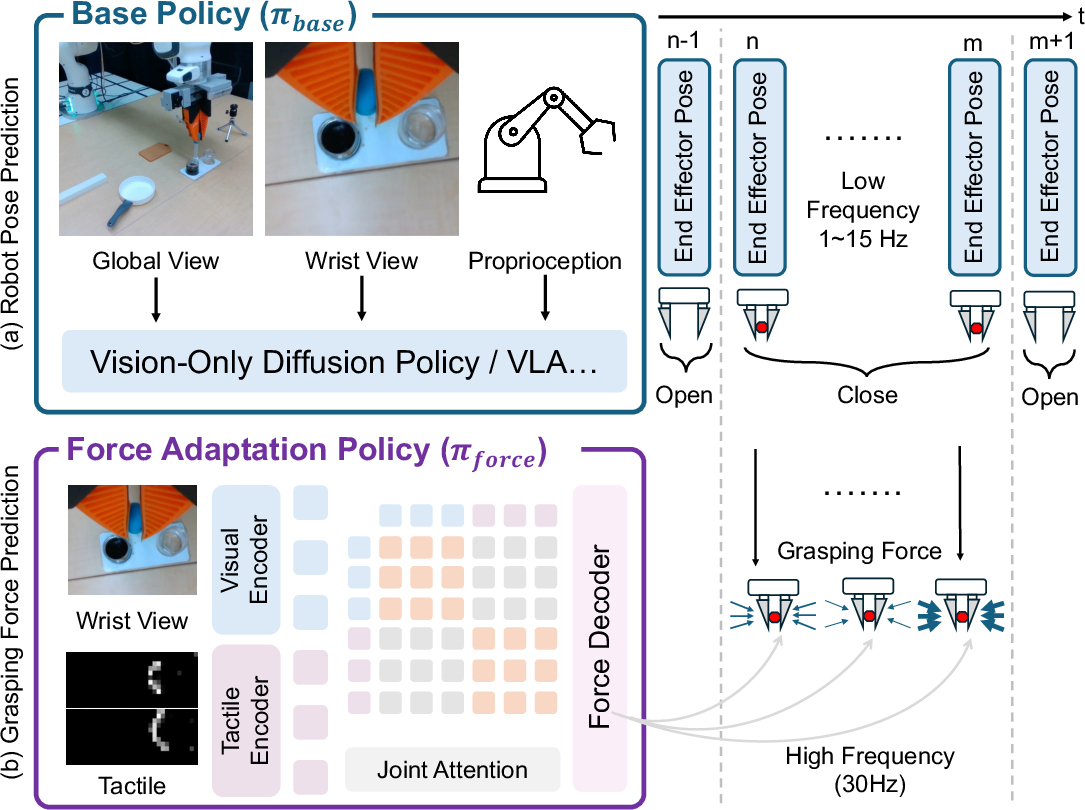
Robots usually plan everything together at a slow pace (several times per second). That’s fine for moving through space, but it’s too slow to react during contact (like feeling slip). The authors propose RETAF: a two-part control system.
- A base policy (the planner): decides where the robot’s hand should move and when to open/close, using regular camera images. It runs at a normal speed.
- A force adaptation policy (the reflex): once the gripper starts closing, this second part wakes up and adjusts the squeezing force very quickly (about 30+ times per second) using the wrist camera and touch sensors.
Analogy: The base policy is like your brain deciding to pick up a tomato; the force policy is like your fingers’ reflexes automatically fine-tuning the squeeze when you feel it.
How they tested it
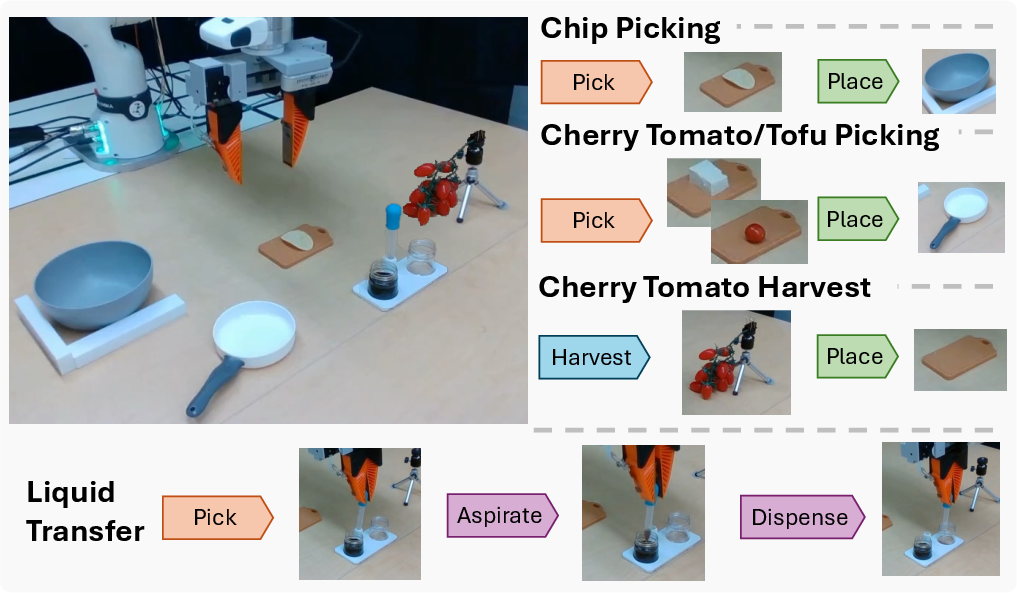
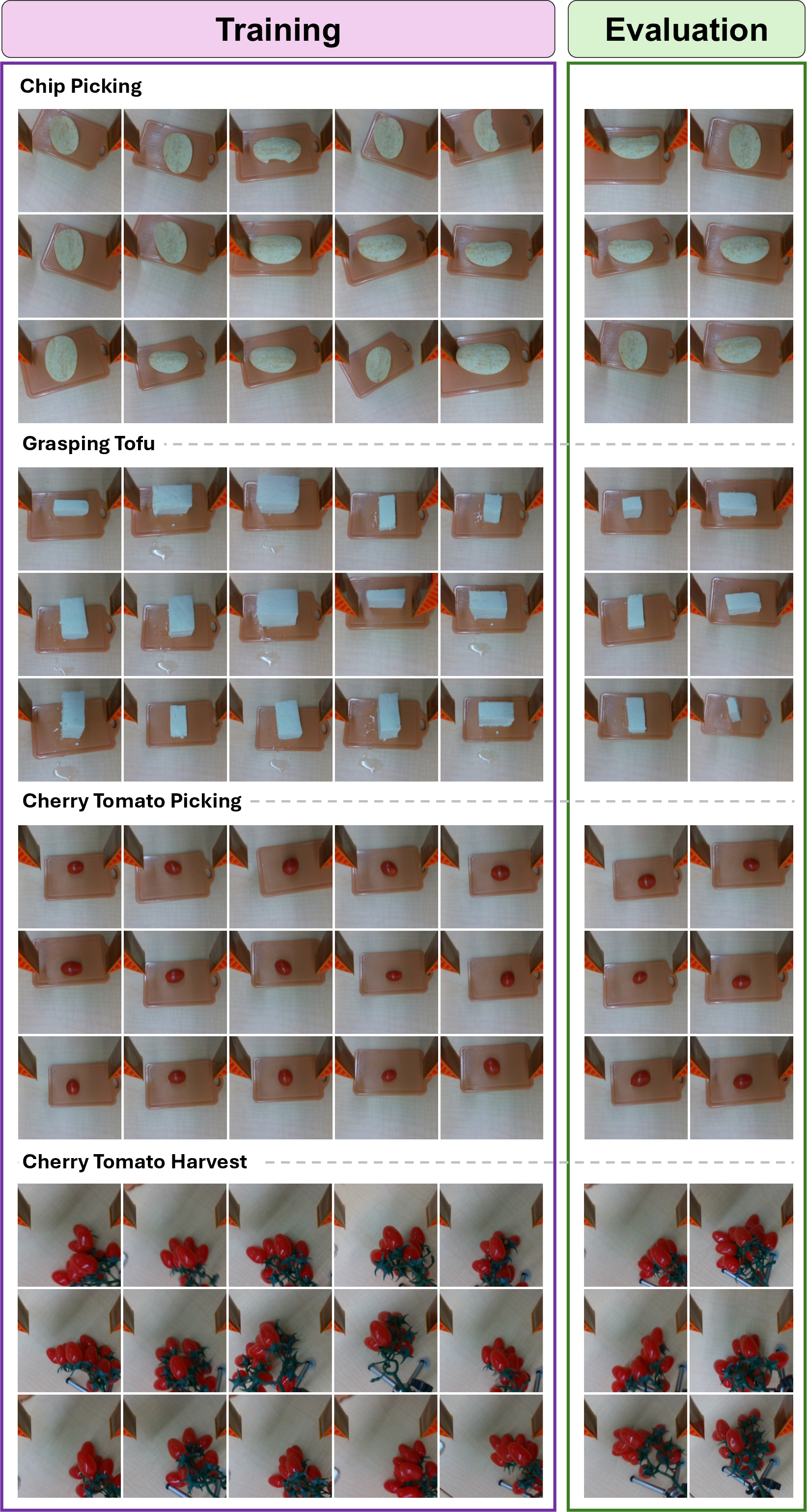
They trained the system on human demonstrations and then ran five real-world tasks that need careful, continuous force control:
- Picking up tofu without crushing it
- Picking up a potato chip without breaking it
- Picking up a cherry tomato that can be firmer or softer on different days
- Harvesting a tomato from a fake vine without slipping or squishing it
- Transferring liquid with a dropper (grip must adapt as you suck in and squeeze out liquid)
They compared:
- Position control (how far to close fingers) vs. force control (how hard to squeeze)
- Using no tactile sensing vs. using tactile sensing
- Standard “all-in-one” policies vs. their RETAF two-part system
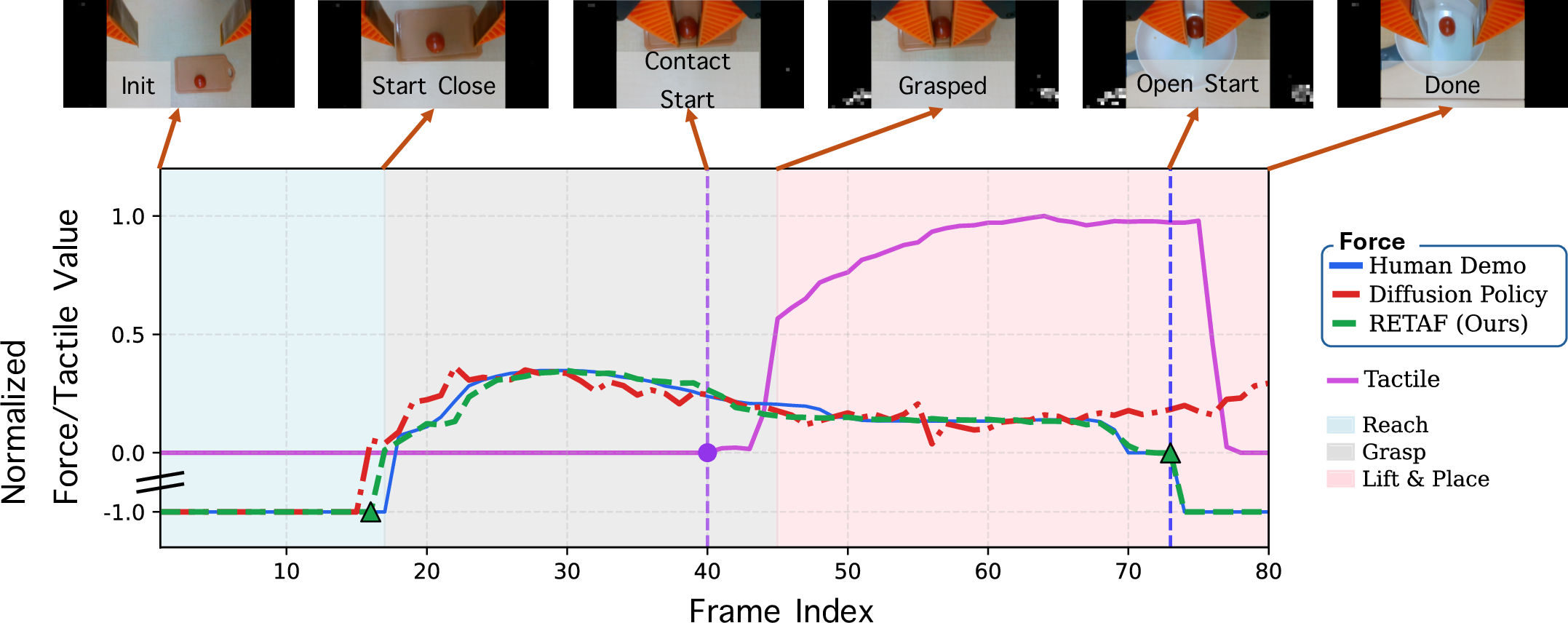
They measured three stages: reaching the object, holding it stably, and finishing the task (like placing or transferring).
What they found (and why it matters)
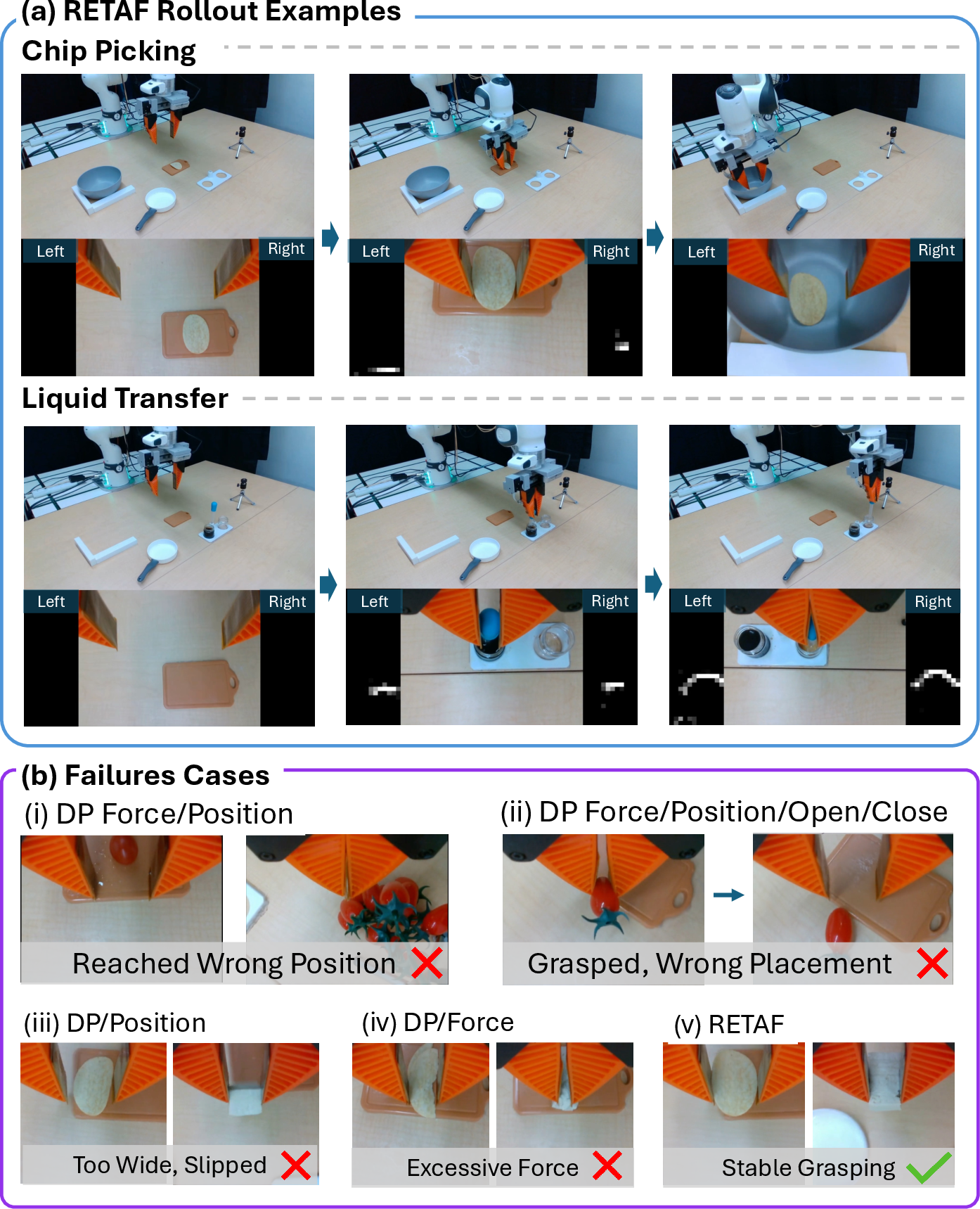
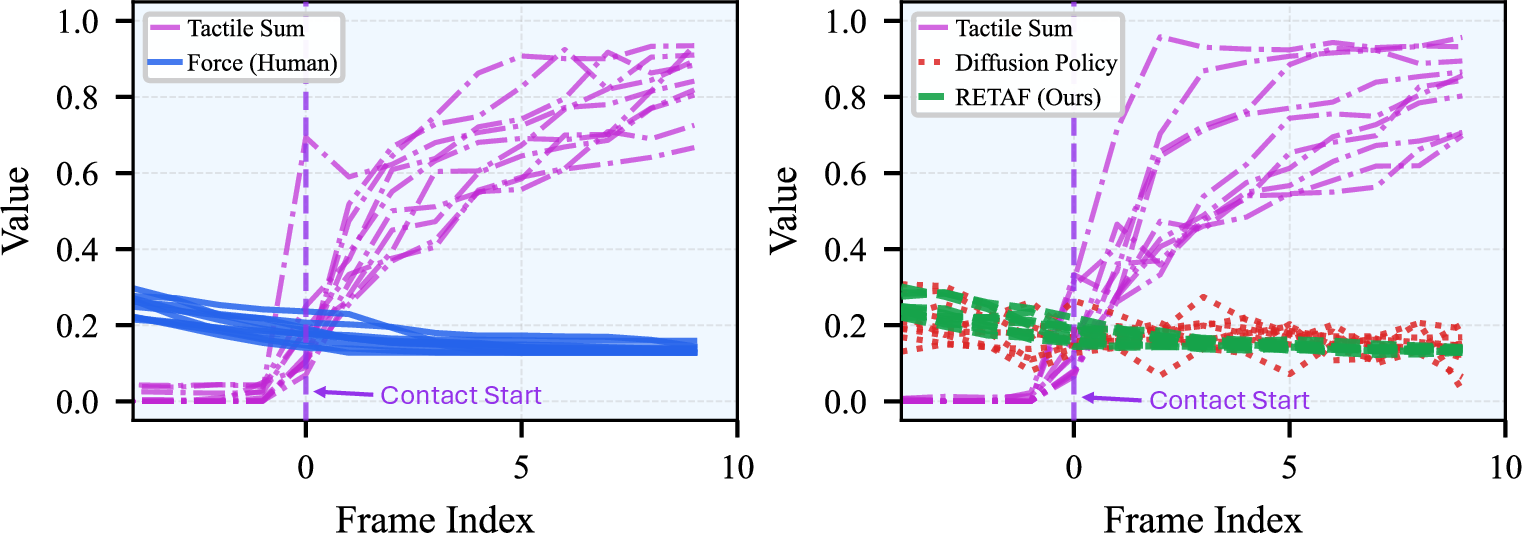
- Direct force control improves delicate handling: Across the five tasks, using force control led to more stable grasps than position control. This is because small changes in object size or softness don’t confuse force control as much—“squeeze to this strength” works across more situations than “close to this width.”
- Tactile feedback is essential: Simply adding touch sensors to a slow, all-in-one controller didn’t help much. But when tactile signals were used by a fast “reflex” module (RETAF), the robot adjusted squeezing in real time and performed far better.
- Decoupling helps: RETAF’s split design (slow planner for movement, fast reflex for force) improved both reaching and grasping. The base policy became more reliable because it only had to predict open/close, not the exact force. The reflex handled the tricky part during contact.
- Better results overall: RETAF with force control achieved much higher stable grasps and task success than the other methods on all five tasks. It also worked with different base policies, showing it’s flexible.
In short: force control + tactile sensing + fast reactions = gentler, more reliable robot hands.
Why this is important and what’s next
This work shows that:
- Gentle, precise robot grasping doesn’t have to be expensive. A ~$150 gripper with touch sensing can do impressive things.
- Teaching robots to “feel” and react quickly during contact makes them much better at handling fragile objects.
- The approach could help robots in homes, kitchens, labs, or hospitals—anywhere they must handle soft or variable items (food, tubes, tools) safely.
Future directions include collecting larger datasets of touch-and-force, applying the method to more objects and tasks, and studying the theory behind why force control improves learning. The long-term goal is to make robots as good as humans at the everyday skill of “just-right” squeezing.
Knowledge Gaps
Knowledge Gaps, Limitations, and Open Questions
Below is a concise list of concrete gaps and open questions left unresolved by the paper, organized by theme to guide future research.
Hardware: TF-Gripper Design and Sensing
- Force calibration only characterized at a single contact location (~1 cm from the fingertip); the accuracy, linearity, and repeatability of current-to-force mapping across the full fingertip surface, varying contact points, and different pad deformations remain unquantified.
- Long-term mechanical stability is untested: effects of belt wear, pad aging/compliance changes, rail friction changes, and pulley backlash on force accuracy and repeatability over weeks/months of operation are unknown.
- Temperature robustness is only partially addressed (20% current for 20 minutes at 25°C): performance across broader currents, ambient temperatures, and prolonged continuous duty cycles lacks characterization.
- End-to-end force regulation is effectively open-loop (force set via current); there is no closed-loop tracking of measured force at the fingertip. The benefit of adding explicit force feedback (e.g., from tactile or inline load sensing) on tracking error and stability is unexplored.
- The gripper controls “normal” grasp force only; regulation of shear forces/torques (and their effect on slip) is not addressed, despite tactile sensors potentially containing shear cues.
- Independent versus symmetric force control per finger is not specified or evaluated; how asymmetric forces affect stability and damage for non-uniform objects remains unknown.
- Minimum controllable force (≈0.45 N) may still be too high for ultra-delicate items; the feasibility of sub-0.1 N control (mechanism, actuators, pads) is an open design question.
- Dynamic performance (force control bandwidth, tracking latency, overshoot) during moving contact and fast transients (e.g., incipient slip) is not measured; actuator and communication latencies and their contribution to reaction time are not quantified.
- Tactile sensor bandwidth, latency, and noise characteristics (and how they impact control stability) are not reported; the synchronization between wrist camera, tactile readings, and motor commands is unspecified.
- Cross-robot compatibility is claimed via adapters but not empirically validated; performance differences across arms (e.g., compliance, controller timing) are unknown.
- Safety and reliability aspects (overforce detection, emergency stops, pinch hazards, compliance strategies) are not discussed or benchmarked.
Teleoperation and Data Quality
- The teleoperation force mapping (operator ring current → gripper current/force) lacks a detailed calibration protocol and external validation against ground-truth force at the robot fingertips during demonstrations.
- Inter-operator variability, ergonomics, and training effects on demonstration quality (force smoothness, timing) are not studied; the robustness of learned policies to demonstration noise is unknown.
- Demonstrations record motor current as a proxy for force; there is no independent force ground truth in task executions to quantify label noise and its impact on learning.
- Dataset scale is small (50 demos/task; 5 tasks) with short trajectories (4–10 s); scaling laws (how performance grows with data size/variety) are unexamined.
- Train/test regime lacks explicit out-of-distribution testing (e.g., different brands of chips, humidity/temperature variations, unseen object textures, sizes, or pad materials); generalization boundaries are unclear.
- It is unclear whether the full dataset, CAD/BOM, firmware, and calibration scripts are open-sourced in a way that enables reproducible data collection in other labs.
RETAF: Architecture and Learning
- No ablations on RETAF’s design choices (e.g., activation trigger, wrist-only vs tactile-only vs fused inputs, attention vs other fusion schemes, control frequency) to isolate which components drive the gains.
- Force policy activation is gated only by the base policy’s open/close action; tactile-triggered or hybrid triggers (e.g., contact detection, slip onset) might be more reliable and are not evaluated.
- The force controller learns by behavior cloning of human force profiles; the benefits of reinforcement learning, adaptive/preview control, or slip-aware cost shaping for improved robustness and lower damage are untested.
- RETAF does not explicitly estimate or predict slip; integrating tactile slip detection or friction estimation into the control loop (and its effect on performance) remains open.
- The force policy uses wrist-view and tactile only; tasks that need global context (e.g., object mass, anticipated motion after grasp, or non-local material cues) may suffer. When and how to re-introduce global scene cues is not studied.
- The action abstraction for the base policy is a discrete open/close; whether richer gripper intents (e.g., desired force profile, close velocity, or force schedule) improve coordination with the force policy is unexplored.
- End-to-end latency from sensing (camera/tactile) through inference to actuation is not measured; the actual reaction time relative to the proposed ≤50 ms requirement is unknown.
- Policy robustness to sensor failures/occlusions/noise (e.g., saturated tactile readings, wrist camera blur, intermittent frames) is not analyzed; fault detection or fallback strategies are absent.
- Extension beyond parallel-jaw grippers (e.g., multi-finger/dexterous hands, multi-contact tasks) and multi-axis force regulation (normal + shear/torque) is not addressed.
- How RETAF scales to multi-task or single-policy training across many objects/tasks (shared force priors, task-conditioned force profiles) remains open.
Experimental Design and Baselines
- Comparisons exclude classical control baselines (e.g., impedance/hybrid force-position control with wrist F/T sensors) and higher-end commercial force grippers; the relative merit of RETAF vs traditional controllers is unquantified.
- Only 10 rollouts per task are reported without confidence intervals or statistical tests; the stability and significance of improvements are unclear.
- Force tracking metrics (e.g., RMS force error, overshoot, settling time) are not reported, making it hard to link task outcomes to control quality.
- Damage and deformation are evaluated qualitatively; standardized quantitative measures (e.g., deformation percentage via vision, breakage force thresholds measured ex situ) would strengthen conclusions.
- The choice and variety of tasks are limited (five tabletop tasks); extensions to broader contact-rich skills (insertion, sliding, screwing, cutting, wiping, assembly) and to dynamic interactions were not tested.
- No ablation on tactile modality: different tactile sensors, pad stiffnesses, pad geometries, or sensor placements were not compared; sensitivity of performance to these design choices is unknown.
- Baselines include DP and ViTac-MAE; stronger VLA or closed-loop tactile-RL baselines, as well as policies that explicitly model contact dynamics, are missing.
Generalization, Scaling, and Deployment
- Cross-domain generalization (new objects, textures, sizes, and environmental conditions) is not systematically evaluated; policy robustness to domain shift is unknown.
- The effect of camera viewpoint changes, lighting variation, and background clutter on wrist-view perception and force regulation is untested.
- Sim-to-real pathways are not explored; there is no simulation environment for force/tactile pretraining or domain randomization, limiting scalable data generation.
- Compute requirements and throughput are not rigorously profiled; a clear budget and latency breakdown across sensing, inference, and actuation interfaces is needed for deployment.
- Integration with arm-level compliance (e.g., impedance control, whole-body force strategies) and their interaction with gripper force regulation is not studied.
- Real-world safety, maintenance, and hygiene considerations for soft pads and tactile skins (e.g., contamination, cleaning, liquid exposure) are not addressed.
Practical Applications
Immediate Applications
Below are actionable applications that can be deployed now using the paper’s hardware (TF‑Gripper + teleop) and software ideas (RETAF design pattern), along with sector links, potential tools/workflows, and feasibility notes.
- TF‑Gripper kit for low-cost force-controlled manipulation R&D (robotics, education)
- What: Adopt the ~$150 TF‑Gripper to study and prototype gentle, force-regulated manipulation with an effective force range of 0.45–45 N.
- Tools/workflows: 3D-printed gripper + Dynamixel XL430 actuators; ISO 9409‑1‑A50 adapter for UR/Franka; wrist camera + FlexiTac fingertips; provided current-to-force calibration and temperature compensation routines.
- Assumptions/dependencies: Access to compatible robot arms (e.g., UR, Franka) and a wrist camera; tactile sensor availability (FlexiTac) and replacement stock; ROS/driver integration.
- Drop-in RETAF-style control module for improved grasp stability (software, robotics)
- What: Integrate the RETAF pattern into existing Diffusion Policy (DP) or Vision-Language-Action (VLA) stacks to decouple pose prediction (low frequency) from high-frequency force regulation using wrist-view + tactile feedback.
- Tools/workflows: RETAF code pattern, joint-attention encoder for wrist RGB + tactile, 30–80 Hz force loop running alongside a 5–10 Hz base policy; ROS node or Python SDK integration.
- Assumptions/dependencies: GPU or edge compute that can sustain 30–80 Hz inference for the light force policy; time sync between wrist camera/tactile and control loop; initial demos for supervised training.
- Force-aware teleoperation and dataset collection (academia, startups)
- What: Use the <$100 teleop device to collect human demonstrations with ground-truth grasping force for contact-rich tasks; build new visuo-tactile-force datasets.
- Tools/workflows: VR/SpaceMouse pose teleop + finger-ring force input (mapped via motor current); synchronized logging (15 Hz trajectories; higher-rate force/tactile); labeling scripts for stage outcomes (reach/grasp/success).
- Assumptions/dependencies: Stable current-to-force calibration; operator training; data storage and curation pipelines.
- Gentle handling in food packaging and prep prototypes (food/retail automation)
- What: Retrofit benchtop cobots to pick and place fragile items (e.g., chips, cherry tomatoes, tofu) with direct force control rather than width control.
- Tools/workflows: TF‑Gripper on UR/Franka arms; RETAF for grasping/transfer; simple task-specific prompts or waypoints; cleaning/removable soft fingertips for food safety.
- Assumptions/dependencies: Washable/food-safe fingertip covers; HACCP or equivalent compliance plans; controlled workspace (minimal contamination sources).
- Pipeline for liquid transfer with bulb droppers or pipette bulbs (lab automation, education)
- What: Execute draw-and-dispense with reactive force control to maintain grip while modulating squeeze pressure.
- Tools/workflows: Wrist-view + tactile feedback to adapt force as dropper weight/pressure change; pre-made routines for suction/squeeze timing.
- Assumptions/dependencies: Consistent droppers or bulb geometries; splash/spill detection rules; lab safety compliance (e.g., bio/chem protocols not covered by current hardware).
- Produce handling and small-greenhouse harvesting pilots (agriculture)
- What: Pick delicate fruits (e.g., cherry tomatoes on the vine) in controlled environments, with human supervision or batch autonomy.
- Tools/workflows: TF‑Gripper on mobile base or gantry; wrist camera + tactile slip cues; RETAF for pull-and-pluck with friction-aware force.
- Assumptions/dependencies: Greenhouse lighting and access; limited crop variety; weather-exposed field use not addressed; needs protective shrouds and cable management.
- Gentle QA/characterization of fragile goods (manufacturing QA, R&D)
- What: Apply controlled squeeze forces to measure breakage thresholds or deformation tolerance (e.g., packaging, thin wafers, soft goods).
- Tools/workflows: Force sweep scripts; tactile area/deformation proxies; logging of force vs. deformation/rupture events.
- Assumptions/dependencies: Tactile calibration to correlate readings with deformation; fixturing for repeatable positioning; non-traceable metrology unless calibrated against standards.
- Safer beginner-friendly HRI training (education, safety)
- What: Use the low minimum force and soft pads to teach contact-rich manipulation with reduced damage risk.
- Tools/workflows: Classroom labs on force vs. position control; exercises replicating tofu, chip, and tomato tasks; safety interlocks at software (max force caps).
- Assumptions/dependencies: Instructor oversight; clear safety policies; spare tactile skins.
- Benchmarking suite for force-regulated manipulation (academia, open-source)
- What: Standardize the paper’s five tasks (tofu, chip, tomato pick/harvest, liquid transfer) for fair policy comparisons with reach/grasp/success metrics.
- Tools/workflows: Task kits and protocols; evaluation scripts; common datasets and baselines (DP, ViTac-MAE, RETAF variants).
- Assumptions/dependencies: Community adoption; consistent object sourcing; shared data formats.
- Rapid prototyping for delicate SKUs in micro-fulfillment (logistics/retail)
- What: Validate SKU-specific gentle grasp strategies (e.g., bakery goods, clamshell produce) before scaling.
- Tools/workflows: SKU trials with force policy tuning; slip detection thresholds; operator-in-the-loop overrides.
- Assumptions/dependencies: SKU variability and packaging consistency; path planning integration; cleaning workflow for edible SKUs.
- Maintenance and calibration utilities (cross-sector)
- What: Adopt current-temperature compensation to keep force drift <4% and maintain repeatability.
- Tools/workflows: Periodic force calibration routine, belt tension checks; firmware parameter logging.
- Assumptions/dependencies: Access to simple calibration rigs (load cells); scheduled maintenance.
Long-Term Applications
These opportunities are enabled by the paper’s innovations but require further research, robustness, scaling, or regulatory clearance before broad deployment.
- Industrial-scale soft-fruit harvesting (agriculture)
- What: Robust, high-throughput picking of soft fruits with variable ripeness and occlusions.
- Potential tools/workflows: Fleet-level RETAF variants trained on large visuo-tactile-force datasets; crop-specific fingertip designs; slip/tear risk models.
- Assumptions/dependencies: Weatherproofing; seasonal generalization; redundancy and uptime; food safety/cleaning automation; complex navigation.
- Generalist force-aware manipulation models (software, robotics)
- What: Foundation models trained on large-scale tactile-force-visual corpora to generalize across objects and tasks.
- Potential tools/workflows: Self-supervised tactile pretraining; multi-robot data federation; unified action abstractions for force and pose.
- Assumptions/dependencies: Massive datasets, compute, and standardization of tactile formats; strong sim-to-real for contact.
- Dexterous in-hand manipulation with multi-finger hands (advanced robotics)
- What: Extend RETAF to multi-DoF fingertips for rolling, regrasp, and fine force distribution control.
- Potential tools/workflows: Multi-finger tactile skins; decentralized high-frequency force controllers per finger; joint attention across multiple wrist/finger cameras.
- Assumptions/dependencies: Hardware complexity, latency budgets, tactile durability, cost.
- Delicate electronics and flexible material assembly (manufacturing)
- What: Place, route, and fasten fragile components (e.g., flex-PCBs, micro-optics) with precise contact regulation.
- Potential tools/workflows: Force corridors per step; tactile slip/tilt inference; real-time corrective nudges.
- Assumptions/dependencies: Cleanroom compatibility; ESD safety; micron-level positioning beyond current setup.
- Assistive care: feeding, dressing, household support (healthcare, home robotics)
- What: Gentle manipulation near humans (utensil handling, soft textile grip, bottle opening).
- Potential tools/workflows: RETAF policies with safety-verified force caps; learned personal preference profiles; fail-safe release behaviors.
- Assumptions/dependencies: Clinical validation, liability/safety certification, hygienic materials, reliability in unstructured homes.
- Surgical and micro-manipulation assistance (medtech)
- What: Sub-Newton force regulation for tissue handling or microlab tasks with sterilizable, high-precision end-effectors.
- Potential tools/workflows: Sterile, miniaturized tactile arrays; sub-mm pose control; haptic surgeon-in-the-loop modes.
- Assumptions/dependencies: Regulatory approvals, biocompatibility, high-precision actuation; new hardware beyond current gripper.
- Quality grading via visuo-tactile firmness estimation (supply chain)
- What: Non-destructive produce grading by controlled squeeze and tactile signatures.
- Potential tools/workflows: Learned firmness regressors; standardized squeeze protocols and force-deformation curves; grading lines integration.
- Assumptions/dependencies: Sensor calibration across units; throughput; domain drift across produce varieties and seasons.
- Large-SKU e-commerce handling with gentle policies (warehousing)
- What: Universal picking of fragile, deformable, or glossy items with reduced damage/returns.
- Potential tools/workflows: SKU embedding to force priors; on-line adaptation using tactile anomaly signals; autonomous error recovery.
- Assumptions/dependencies: Bin clutter, reflectance challenges, high duty cycles; robust fingertips and maintenance.
- Bidirectional telepresence with richer haptics (remote operation)
- What: Expand the spring-like teleop to provide richer force cues back to the operator for high-fidelity remote manipulation.
- Potential tools/workflows: Active haptic devices; low-latency comms; shared autonomy blending RETAF with operator input.
- Assumptions/dependencies: Network QoS; haptic device cost; motion scaling and safety bounds.
- Standardization and policy for collaborative gentle manipulation (policy, industry consortia)
- What: Define minimum force capabilities, tactile logging requirements, and benchmark tasks for co-bots handling fragile objects.
- Potential tools/workflows: Open benchmark suites (e.g., tofu/chip/tomato/liquid tasks); procurement specs; conformance tests.
- Assumptions/dependencies: Multi-stakeholder alignment; measurable KPIs; certification bodies’ engagement.
- Productized “RETAF-on-a-card” edge controller (robotics OEMs)
- What: An embedded module that adds high-frequency force regulation to existing arms/grippers as a service.
- Potential tools/workflows: Plug-in ROS2 nodes; wrist/tactile sensor packs; OTA updates with new force skills.
- Assumptions/dependencies: Vendor partnerships; hardware abstraction across grippers; long-term support.
- Cleaner, sterilizable, and durable tactile skins (hardware roadmapping)
- What: Industrial-grade tactile sensors that retain softness, are washable, and have stable calibration over time.
- Potential tools/workflows: Modular fingertip cartridges; automated calibration rigs; self-check routines.
- Assumptions/dependencies: Materials R&D; cost versus longevity trade-offs; supply chain maturity.
Notes on general feasibility across applications:
- Compute/latency: High-frequency force loops (≥30 Hz) must meet end-to-end latencies under ~50 ms, including sensing, inference, and actuation.
- Sensing stack: Reliable wrist-view and tactile streams with time synchronization are essential; occlusions and sensor wear degrade performance.
- Calibration and drift: Current-to-force mapping and temperature compensation routines must be maintained; periodic validation with load cells is recommended.
- Safety: Force caps, slip detection triggers, and fail-safe releases are crucial in human-facing or food-handling settings.
- Generalization: Robust cross-object performance will require larger, diverse tactile-force datasets and possibly pretraining.
Glossary
- 6D rotation representation: A continuous, redundancy-based way to represent 3D rotations that avoids singularities and discontinuities. "absolute end-effector rotation represented using a 6D rotation representation~\cite{zhou2019continuity}"
- Backlash: Mechanical play or lost motion in a transmission that causes lag or inconsistency when reversing direction. "backlash and position-dependent moment arms make consistent force control difficult."
- Behavior cloning: A supervised learning approach that trains policies to imitate expert demonstrations by minimizing action prediction error. "We train $\pi_{\text{base}$ via behavior cloning to match the expert actions"
- CLIP: A pretrained vision-LLM used here as an image encoder to extract visual features. "RGB images are encoded using the image encoder from CLIP~\cite{radford2021learning}."
- Closed-loop force control: A control scheme that uses direct feedback (e.g., force or contact sensors) to adjust and regulate grasping force. "Closed-loop force control improves accuracy by incorporating direct force or contact feedback."
- Compliant interactions: Robot-object contacts where the robot yields or adapts to forces for safe, gentle manipulation. "Force-controlled grippers regulate the contact force applied to objects to enable compliant interactions."
- Diffusion Policy (DP): A manipulation policy that generates actions by denoising sequences of noise, widely used for robot control. "Diffusion Policy~\cite{chi2023diffusion} (DP) is one of the most widely adopted policies for robot manipulation"
- End-effector pose: The position and orientation of the robot’s tool center point (e.g., gripper) in space. "a base policy predicts end-effector pose and gripper open/close action."
- Force adaptation policy: A reactive controller that predicts and adjusts grasping force at high frequency based on local sensing. "RETAF employs a force adaptation policy to reactively predict force at a high frequency"
- Force-regulated manipulation: Tasks where success depends on precisely controlling contact force during interaction. "We evaluate TF-Gripper and RETAF with real-world force-regulated manipulation tasks"
- Idler pulley: A passive pulley that redirects or tensions a belt without adding power transmission. "the timing belt is routed through an idler pulley composed of a cylindrical shaft and two flanged bearings"
- Incipient slip: The onset of slipping at the contact interface that precedes full object slip and informs force adjustments. "capturing signals such as deformation and incipient slip."
- ISO 9409-1-A50: A standardized robot flange interface dimension used to mount end-effectors across different arms. "we provide an ISO 9409-1-A50 compatible adapter"
- Joint-attention layer: An attention mechanism that fuses multiple modalities (e.g., vision and tactile) by attending jointly to them. "through a joint-attention layer~\cite{vaswani2017attention}."
- Kinesthetic feedback: Physical sensation of resistance or motion that informs the operator’s force application during teleoperation. "provides local kinesthetic feedback"
- Linear rail: A low-friction guide that constrains motion to a straight path for smooth parallel jaw movement. "mounted on a linear slider that moves along a low-friction linear rail"
- Masked autoencoding: A self-supervised pretraining method where parts of the input are masked and reconstructed to learn representations. "pretraining a tactile encoder using masked autoencoding"
- Moment arm: The perpendicular distance from the line of action of force to the rotation axis, determining torque effectiveness. "the effective moment arm is determined by the pulley radius"
- Open-loop force control: Force regulation without direct force feedback, typically estimating force from motor signals like current. "Open-loop force control estimates grasping force indirectly, typically via motor current or actuator torque"
- Piezo-resistive tactile sensor: A soft sensor whose electrical resistance changes with applied pressure, enabling force and contact shape sensing. "we integrate thin and soft piezo-resistive tactile sensors, FlexiTac"
- Proprioception: Internal robot sensing of its own states (e.g., joint positions/velocities) used as non-visual input. "RGB images, proprioception"
- PWM: Pulse-width modulation; here, the motor drive signal correlated with actuator current used to estimate applied force. "Actuator current (PWM)--force relationship."
- Reactive force regulation: Rapid, contact-driven adjustment of grasping force in response to tactile cues during manipulation. "the effectiveness in reactive force regulation."
- Sim-to-real refinement: Techniques to adapt policies trained in simulation to perform robustly on real hardware and tasks. "sim-to-real refinement~\cite{huang2025vtrefine}"
- Teleoperation: Controlling a robot remotely by a human operator, often to record demonstrations. "we designed a teleoperation device paired with TF-Gripper to record human-applied grasping forces."
- Timing-belt transmission: A belt-and-pulley mechanism that provides consistent torque-to-force mapping with reduced backlash. "our gripper employs a timing-belt transmission to minimize backlash"
- Torque sensor: A device that directly measures applied torque (or force at the fingertip when appropriately mounted) for feedback control. "support an fingertip-mounted torque sensor."
- U-Net: A neural network architecture with encoder-decoder and skip connections; here used as a 1D diffusion backbone. "use a 1D U-Net as the diffusion backbone."
- Vision-Language-Action (VLA) models: Policies that map visual inputs and language instructions to robot actions. "vision-language-action (VLA) models~\cite{kim24openvla, black2024pi_0}."
- Visuomotor policy: A controller that maps visual observations to motor commands for robot manipulation. "We leverage existing visuomotor policy architectures as the base policy"
- Wrist-view: Visual observations captured by a camera mounted near the gripper, providing object-centric views during contact. "wrist-view visual observations"
Collections
Sign up for free to add this paper to one or more collections.