- The paper presents a structural decomposition to derive Nash equilibrium in LQG games with delayed and asymmetric information.
- It employs coupled Riccati recursions and tailored Kalman filter designs to decouple state estimation and control decisions.
- Numerical results validate rapid convergence and show that richer information consistently leads to lower control costs.
Problem Context and Motivation
The paper "Noncooperative Game in Multi-controller System under Delayed and Asymmetric Information" (2603.29783) addresses the Nash equilibrium synthesis problem for networked multi-controller systems characterized by delayed sensor measurements and asymmetric information structures. Such conditions are prevalent in cyber-physical systems where decentralized agents possess heterogeneous sensing and actuation capabilities, and where communication latency and partial observation are intrinsic to the architecture. These factors result in the breakdown of the separation principle, producing a strong coupling between state estimation and control—complicating closed-form equilibrium derivation.
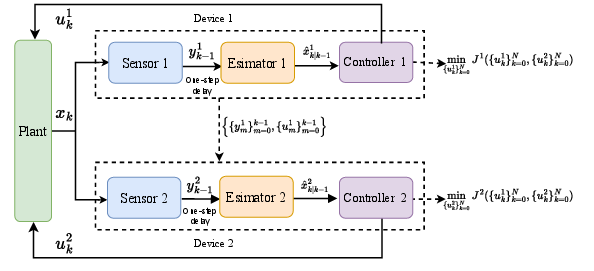
Figure 1: System model capturing delayed and asymmetric information flow between two controllers.
The system considered is a discrete-time linear time-invariant (LTI) process controlled by two agents. The key features are:
- Controller 1 (C1) has only its own one-step delayed sensor data; Controller 2 (C2) can access all of C1's history and its own, creating a strict Fk1⊂Fk2 nesting.
- Each agent optimizes its own quadratic cost functional, which involves the state and both agents' controls, leading to a noncooperative dynamic game.
The delayed and asymmetric information structure (Figure 1) precludes standard LQG or Linear-Quadratic-Gaussian game solutions because state estimation and control designs cannot be separated, making Nash equilibrium computation nontrivial.
The primary technical contribution is a structural decomposition that leverages the nested information pattern. By splitting:
- State estimates into a common component (shared by both agents) and a private innovation for C2,
- C2's control into a 'predictable' part (measurable with Fk1) and an 'innovation' part (based on the extra information only C2 possesses).
This formalism yields orthogonality properties that decouple certain cross-covariance terms and enables parameterization of linear strategies for both controllers. With this structure, the Nash equilibrium can be characterized within the set of admissible linear feedback strategies, where equilibrium policies are functions of local and extra information in explicit form.
Nash Equilibrium Characterization
Equilibrium strategies for both players are constructed as linear state-feedback controllers, where the gains are determined by coupled Riccati recursions—one per player. The control law for controller 1 is based solely on its local estimate, while controller 2 utilizes both common and private information:
- uk1,∗=Kk1x^k∣k−11
- uk2,∗=Kk1x^k∣k−11+Kk2(x^k∣k−12−x^k∣k−11)
where Kk1, Kk2 solve time-varying matrix recursions. The recursions for the Riccati matrices (Pk1, Φk1 for player 1; Pk2, Φk2 for player 2) converge under standard detectability and stabilizability assumptions.
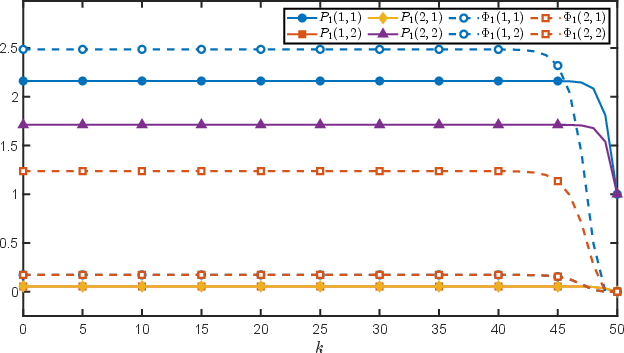
Figure 2: Evolution and convergence of Riccati matrices Fk10, Fk11 for player 1.
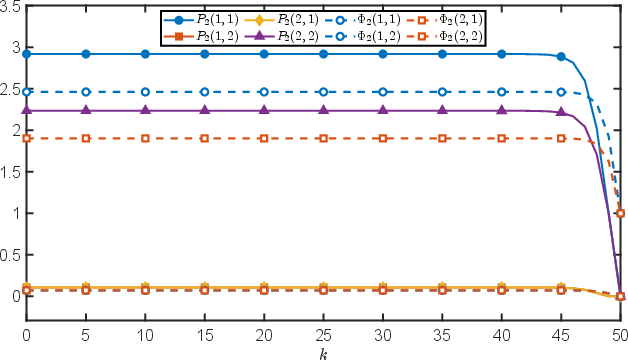
Figure 3: Evolution and convergence of Riccati matrices Fk12, Fk13 for player 2.
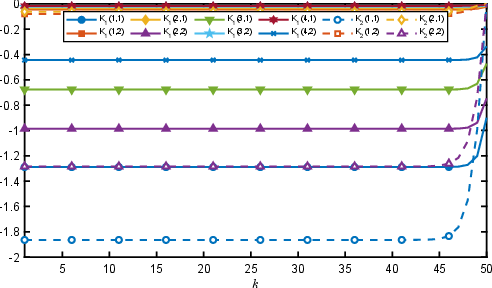
Figure 4: Evolution of optimal feedback gains Fk14, Fk15 supporting Nash equilibrium strategies.
The Kalman filter structure is adapted for each controller's information set, inducing distinct error covariance recursions. The coupling appears in estimator 1's error recursion due to the influence of estimator 2's private innovation through C2's control.
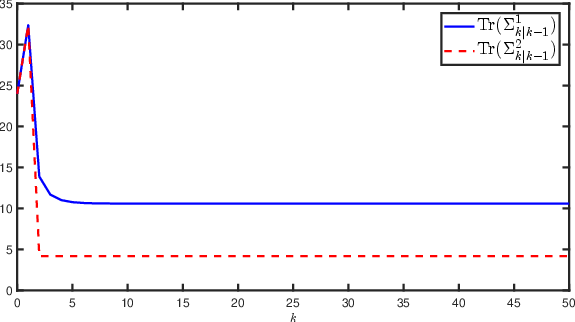
A central analysis establishes the influence of information asymmetry on equilibrium performance. By comparing the costs under symmetric (fully shared information) and asymmetric structures:
Numerical Illustration
The theoretical results are validated via a 2D system with parameterized process, observation, and noise matrices. Iterative computation of the Riccati and Kalman filter equations confirms:
- Rapid convergence of the matrix sequences to steady-state solutions.
- The information advantage: controller 2's estimation is consistently more accurate, and its cost is strictly lower.
- The approach also confirms the unique existence and stability of the Nash equilibrium under the specified structural assumptions.
Theoretical and Practical Implications
The decomposition and existence results have the following consequences:
- Explicit policy parameterizations are available for decentralized LQG games with delayed, asymmetric information, enabling practical design in real networked control systems.
- The machinery can be naturally extended to settings of more than two controllers, although the complexity of the recursion and private—common decompositions will increase.
- The approach is relevant for adversarial control situations (e.g., security/defense resource allocation, economic competition), as well as for hierarchical or cloud-edge CPSs.
Future Directions
Potential extensions include:
- Generalization to multiplayer games with heterogeneous and time-varying communication delays or observation structures.
- Analysis of risk-sensitive extension, robust games, or inclusion of stochastic communication loss models.
- Algorithmically efficient computation and implementation for large-scale networked systems with many agents.
Conclusion
This work provides a comprehensive characterization of Nash equilibrium solutions in noncooperative LQG dynamic games under delayed, asymmetric information architectures, establishing explicit structural decompositions and monotonicity properties relative to information richness. The results enable scalable Nash synthesis for realistic networked systems and form a rigorous analytical foundation for future research into multi-agent optimal and strategic control under practical communication constraints.