- The paper presents a novel wearable haptic device that renders precise 2D directional feedback using a rotatable LRA and asymmetric waveforms.
- It demonstrates significantly improved teleoperation performance in contact-rich tasks, achieving 100% success in key insertion and reduced contact forces.
- Preliminary imitation learning results show that directional feedback enhances policy performance, suggesting its value for adaptive robotic control.
Device Design and System Architecture
The HapCompass system introduces a new wearable interface for robotic teleoperation, addressing the gap in affordable, portable haptic devices capable of providing interpretable directional contact cues. Unlike traditional haptic devices, which either feature non-directional vibration or suffer from perceptual interference and form factor constraints in multi-actuator designs, HapCompass leverages a single linear resonant actuator (LRA) mounted on a mechanically rotatable platform. This mechanism enables the rendering of 2D directional feedback by orienting the actuation axis via a servo motor, combined with an asymmetric waveform to induce a perceptible pulling sensation.
The ergonomic hardware design attaches to the user's middle finger using a ring, enabling the index finger and thumb to rest on the device's contact surfaces. Vibrational energy is isolated for clear perception via a decoupled housing supported by compliant O-rings. The complete device is cost-effective, fabricated for approximately \$140 USD.
The system architecture integrates Meta Quest hand tracking for teleoperation command input and a robot arm equipped with tactile sensors and a wrist-mounted force-torque sensor for feedback. The processing pipeline computes the change in contact forces, projects the result onto the device's 2D plane, and subsequently maps direction and magnitude to the servo and LRA, respectively, ensuring task-relevant axes are maximally informative.
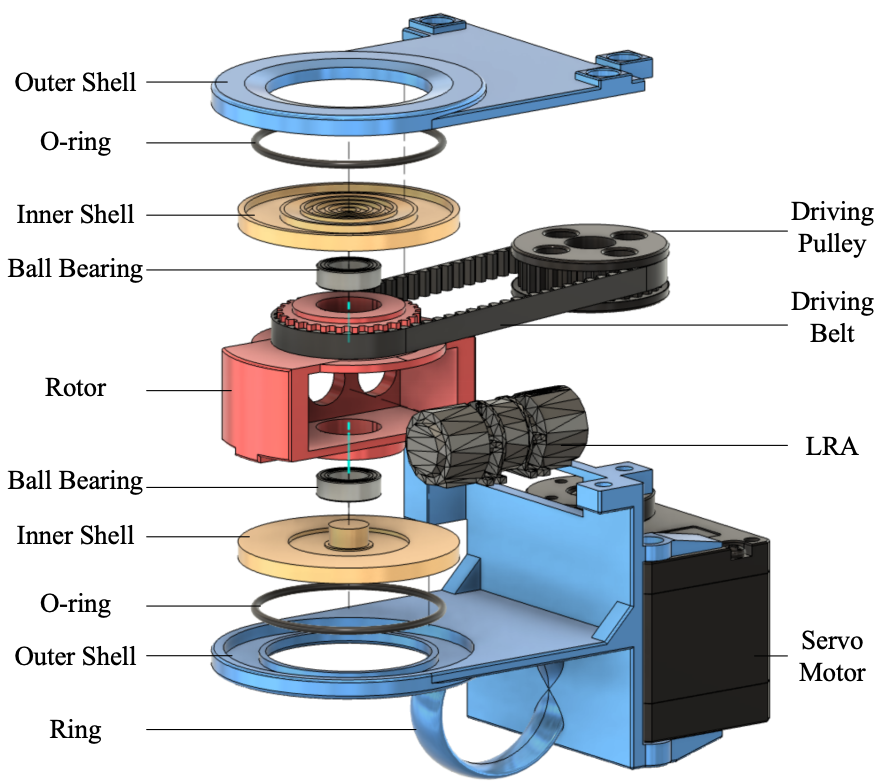
Figure 1: Exploded view of the HapCompass haptic device, highlighting the rotatable actuator and decoupled housing design.
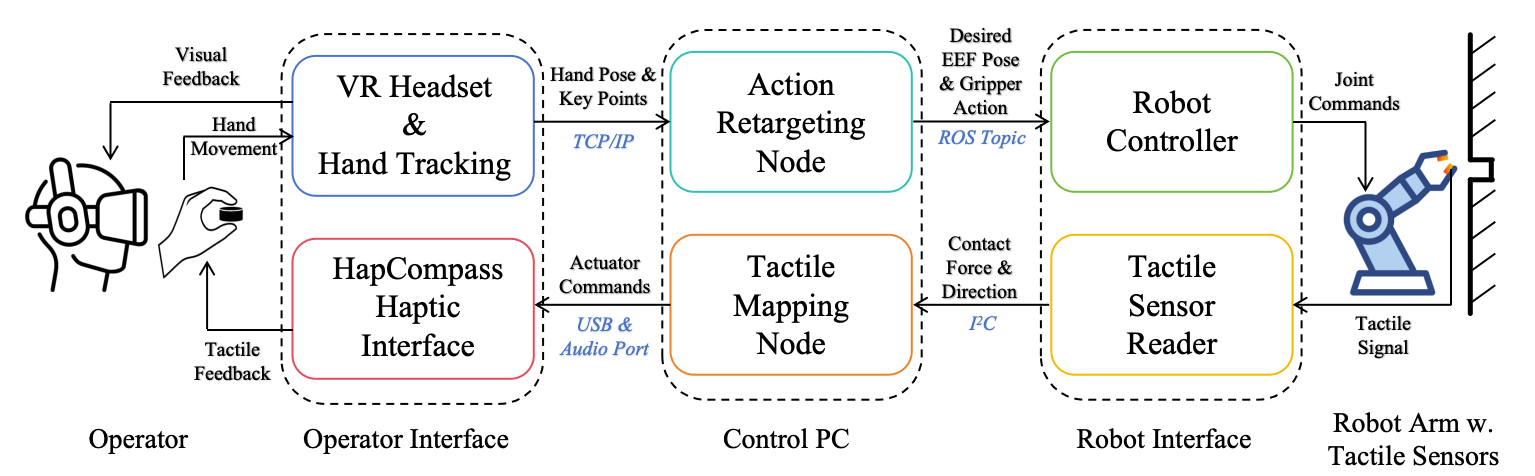
Figure 2: The overall HapCompass system architecture, detailing command/feedback streams and sensor integration.
A controlled perceptual evaluation was conducted to measure the efficacy of HapCompass in rendering directionally interpretable haptic cues. In both 4-AFC (cardinal directions) and 8-AFC (including intercardinal) identification tasks, participants were blindfolded and asked to classify rotationally rendered cues. Results demonstrated 84.4% accuracy with 24.4° mean angular error in the 4-AFC task and 67.2% accuracy with 28.4° mean angular error in 8-AFC, substantially above chance (12.5%).
There was a pronounced superiority in the horizontal directions, attributed to mechanical constraints that attenuate cue clarity in vertical directions due to belt tension. In the 8-AFC task, confusion was observed primarily between vertical or oblique directions, indicative of a limitation in vibration transmission fidelity along certain axes.
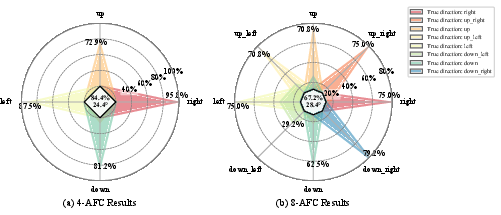
Figure 3: Direction-identification results for 4-AFC and 8-AFC tasks as radar plots, reporting overall accuracy and angular error.
Three manipulation tasks—Key Insertion, USB Insertion, and Spaghetti Probing—were benchmarked under four feedback modalities: vision-only, non-directional tactile (via HapCompass or Quest controller), and the proposed vision + directional tactile mode. The directional Mode (C4) consistently provided the highest success rates, lower maximum contact forces, and reduced insertion torques across all tasks.
The Key Insertion task exhibited a 100% success rate for C4 compared to 63.2% for vision-only (C1), 73.7% for non-directional tactile, and 90% for the controller baseline. Maximum contact force was also minimized in C4 (mean 65.9 N), and bending torque was lowest, indicating a direct benefit for task safety and fragility management. In the USB Insertion and Spaghetti Probing tasks, C4 either matched or exceeded the baselines in terms of success—highlighting the practical utility for both structured and unstructured contact-rich environments.
Efficiency assessments favored controller-based haptic feedback in terms of time, but this was attributed to tracking stability, not the quality of haptic cues. Selection bias in controller results was noted due to low success rates in Spaghetti Probing, supporting the claim that directional information enables adaptive, obstacle-aware probing.
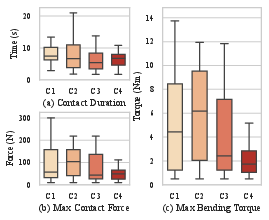
Figure 4: Teleoperation performance in Key Insertion under four feedback conditions; distributions shown for contact duration, force, and torque.
Imitation Learning Implications
A preliminary imitation learning evaluation analyzed the effect of data collected with HapCompass-provided directional feedback. In a simplified Key Insertion task scenario, the policy trained with directional demonstrations (C4) achieved 90% success versus 60% for the non-directional controller baseline (C3), alongside lower peak forces and torques. Qualitative observation indicated the C4 policy exhibited adaptive, tactile-driven adjustments not evident in the C3 policy, which often resulted in excessive force application and task failure.
This supports the hypothesis that high-quality, tactile-enriched demonstration data facilitates improved robot policy learning for contact-rich tasks. The integration of interpretable directional force signals during teleoperation affords more actionable sensory correspondence between operator intent and contact events—advancing the potential for robust imitation learning pipelines.
Implications and Future Directions
The research affirms that wearable, affordable directional haptic feedback is both feasible and beneficial for contact-rich teleoperation and downstream learning. Theoretical implications include the improved mapping of sensed contact forces to actionable feedback, supporting operator dexterity in manipulation tasks where visual feedback is insufficient. Practically, HapCompass lowers the barrier for deploying tactile-enriched interfaces in field robotics, surgical robots, and industrial assembly.
Future work should address hardware extension to 3D cue rendering, systematic latency analysis, and generalization studies across broader manipulation domains. Detailed investigation into the impact of directional haptic feedback on imitation learning dataset diversity and policy robustness is warranted—particularly for tasks involving multimodal sensory ambiguity or environmental uncertainty.
Conclusion
HapCompass demonstrates a novel hardware/software integration for delivering portable, interpretable directional haptic cues during robotic teleoperation. Empirical results confirm improved perception of direction, enhanced task success and safety in contact-rich manipulation, and stronger imitation learning outcomes with directional feedback. The system establishes a foundation for future expansion into richer feedback modalities and broader robotic learning paradigms.

