Generalized Planning for the Abstraction and Reasoning Corpus
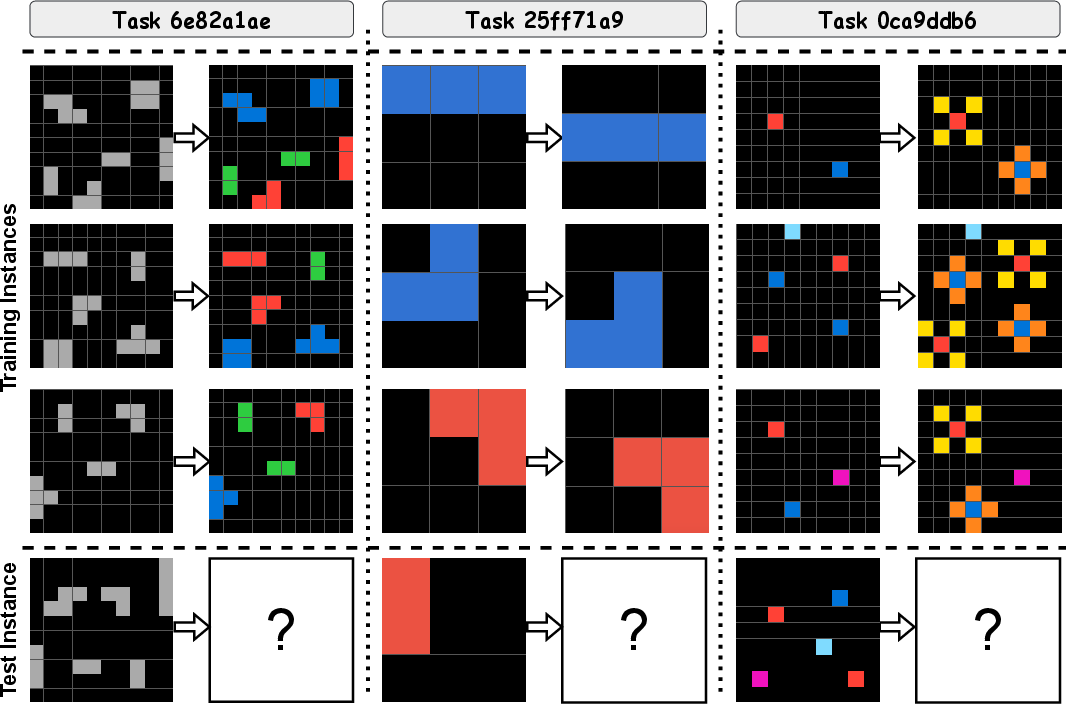
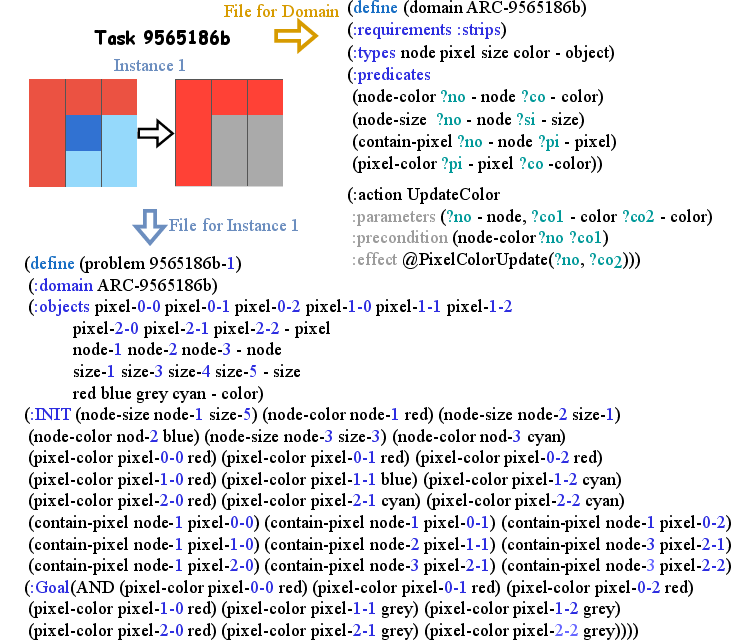
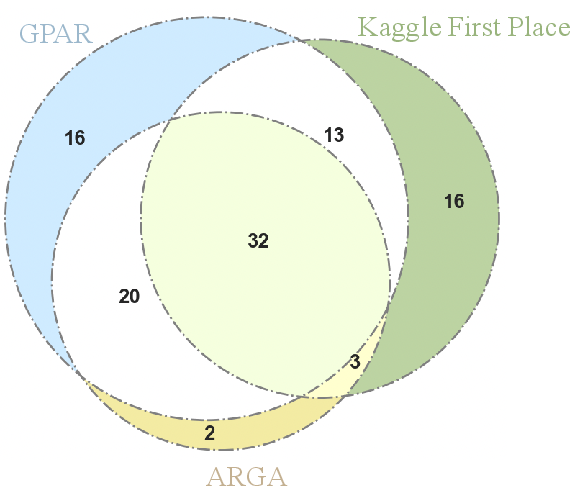
Abstract: The Abstraction and Reasoning Corpus (ARC) is a general artificial intelligence benchmark that poses difficulties for pure machine learning methods due to its requirement for fluid intelligence with a focus on reasoning and abstraction. In this work, we introduce an ARC solver, Generalized Planning for Abstract Reasoning (GPAR). It casts an ARC problem as a generalized planning (GP) problem, where a solution is formalized as a planning program with pointers. We express each ARC problem using the standard Planning Domain Definition Language (PDDL) coupled with external functions representing object-centric abstractions. We show how to scale up GP solvers via domain knowledge specific to ARC in the form of restrictions over the actions model, predicates, arguments and valid structure of planning programs. Our experiments demonstrate that GPAR outperforms the state-of-the-art solvers on the object-centric tasks of the ARC, showing the effectiveness of GP and the expressiveness of PDDL to model ARC problems. The challenges provided by the ARC benchmark motivate research to advance existing GP solvers and understand new relations with other planning computational models. Code is available at github.com/you68681/GPAR.
- Communicating Natural Programs to Humans and Machines. In Proceedings of the 36th Advances in Neural Information Processing Systems, NeurIPS, 3731–3743.
- Measuring Abstract Reasoning in Neural Networks. In Proceedings of the 37th International conference on machine learning, ICML, 511–520.
- Chollet, F. 2019. On the Measure of Intelligence. arXiv preprint arXiv:1911.01547.
- Semantic Attachments for Domain-Independent Planning Systems. In Proceedings of the 19th International conference on machine learning, ICAPS, 114–121.
- Purely Declarative Action Descriptions are Overrated: Classical Planning with Simulators. In Proceedings of the 26th International Joint Conference on Artificial Intelligence, IJCAI, 4294–301.
- CHAPTER 6 - Nonmonotonic Reasoning. In Logical Foundations of Artificial Intelligence, 115–159. Morgan Kaufmann.
- An Introduction to the Planning Domain Definition Language. Synthesis Lectures on Artificial Intelligence and Machine Learning, 13(2): 1–187.
- Generalized Planning: Synthesizing Plans that Work for Multiple Environments. In Proceedings of the 22nd International Joint Conference on Artificial Intelligence, IJCAI, 918–923.
- A Review of Generalized Planning. The Knowledge Engineering Review, 34: e5.
- Fast and Flexible: Human Program Induction in Abstract Reasoning Tasks. arXiv preprint arXiv:2103.05823.
- Novelty and Lifted Helpful Actions in Generalized Planning. In Proceedings of the 16th International Symposium on Combinatorial Search, SoCS, 148–152.
- Levesque, H. J. 1986. Knowledge Representation and Reasoning. Annual Review of Computer Science, 1(1): 255–287.
- A Review of Emerging Research Directions in Abstract Visual Reasoning. Information Fusion, 91: 713–736.
- The ConceptARC Benchmark: Evaluating Understanding and Generalization in the ARC Domain. arXiv preprint arXiv:2305.07141.
- GPS, A Program that Simulates Human Thought. In Computers and Thought, 279–293. McGraw-Hill.
- Scaling-up Generalized Planning as Heuristic Search with Landmarks. In Proceedings of the 15th International Symposium on Combinatorial Search, SoCS, 171–179.
- Computing Programs for Generalized Planning Using a Classical Planner. Artificial Intelligence, 272: 52–85.
- Core Knowledge. Developmental Science, 10(1): 89–96.
- Learning Generalized Plans Using Abstract Counting. In Proceedings of the 23rd AAAI Conference on Artificial Intelligence, AAAI, 991–997.
- top quarks. 2020. ARC-solution. https://github.com/top-quarks/ARC-solution. Accessed: 2023-06-01.
- Graphs, Constraints, and Search for the Abstraction and Reasoning Corpus. In Proceedings of the 37th AAAI Conference on Artificial Intelligence, AAAI, 4115–4122.
Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Collections
Sign up for free to add this paper to one or more collections.