- The paper introduces SPI-BoTER, a dual-stream framework that merges transformer-based sparse self-attention with kinematic modeling for error compensation in industrial robots.
- It employs a novel hybrid loss function combining data residuals with spatial-physical information to optimize prediction accuracy under limited data conditions.
- The model achieves a minimal positional error of 0.2515 mm, outperforming traditional deep learning approaches by 35.16% and demonstrating high computational efficiency.
Introduction to Error Compensation in Industrial Robots
The demand for precision in industrial robotics, which plays a vital role in tasks such as cutting and welding, has necessitated advancements in error compensation methods. Many traditional approaches have been challenged by their simplifications and data demands, resulting in limitations in both accuracy and generalization. To address these, the SPI-BoTER framework integrates a combination of kinematic equations and data-driven methods within a dual mechanism comprising transformers enhanced with sparse self-attention masks and a hybrid loss function. The result is a system that achieves high-precision error compensation under small-sample conditions.
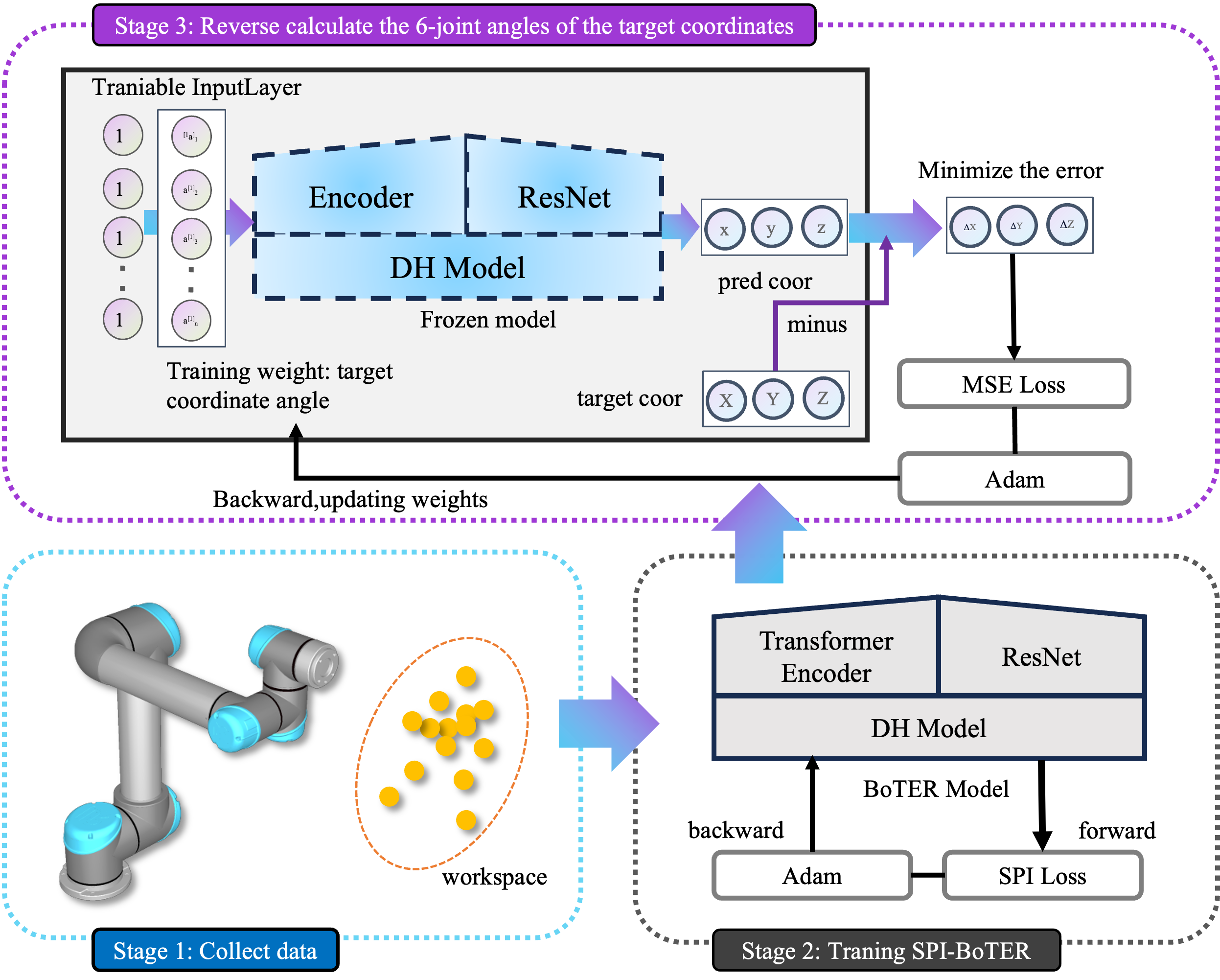
Figure 1: Schematic diagram of the complete error compensation process for industrial robots in this study.
BoTER Model Architecture
Dual-Stream Architecture
BoTER leverages a dual-stream architecture that incorporates elements of both physical modeling and data-driven predictions. This design decouples the theoretical coordinate prediction, underpinned by a DH kinematic model, from a Transformer-driven error compensation pathway.
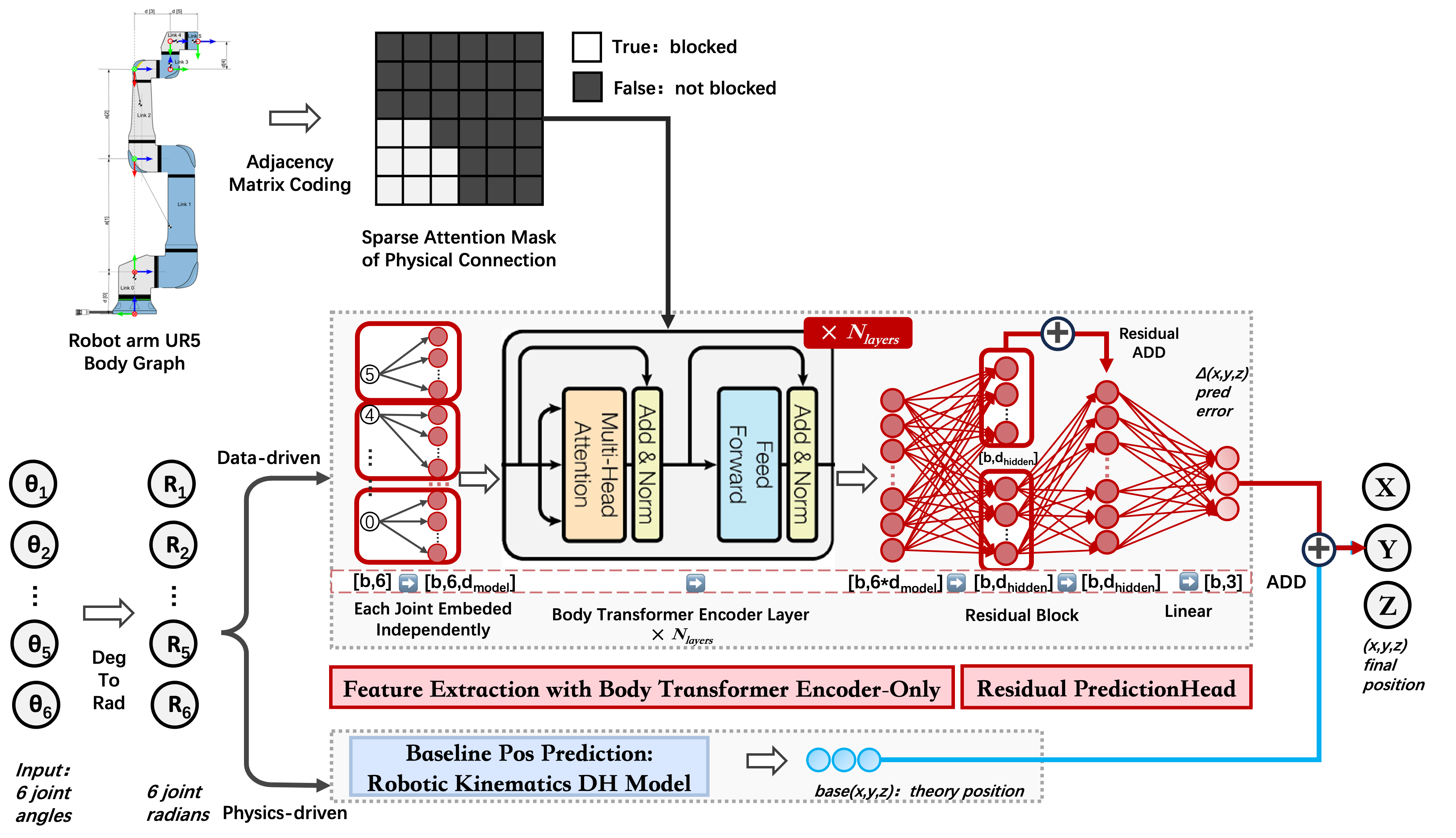
Figure 2: Schematic Diagram of the BoTER Model Architecture.
The architecture's forward branch is predicated on robotic kinematics. This branch integrates DH parameters to extract theoretical position outputs, effectively computing cumulative transformations from joint-specific matrices.
Sparse Self-Attention Masking and Residual Networks
BoTER introduces a novel sparse self-attention mask specifically for six-axis serial manipulators. Such a mechanism improves feature extraction efficiency by accounting for constraints within inter-joint interactions. Complementing this is the integration of residual networks to bolster the stability of value predictions.
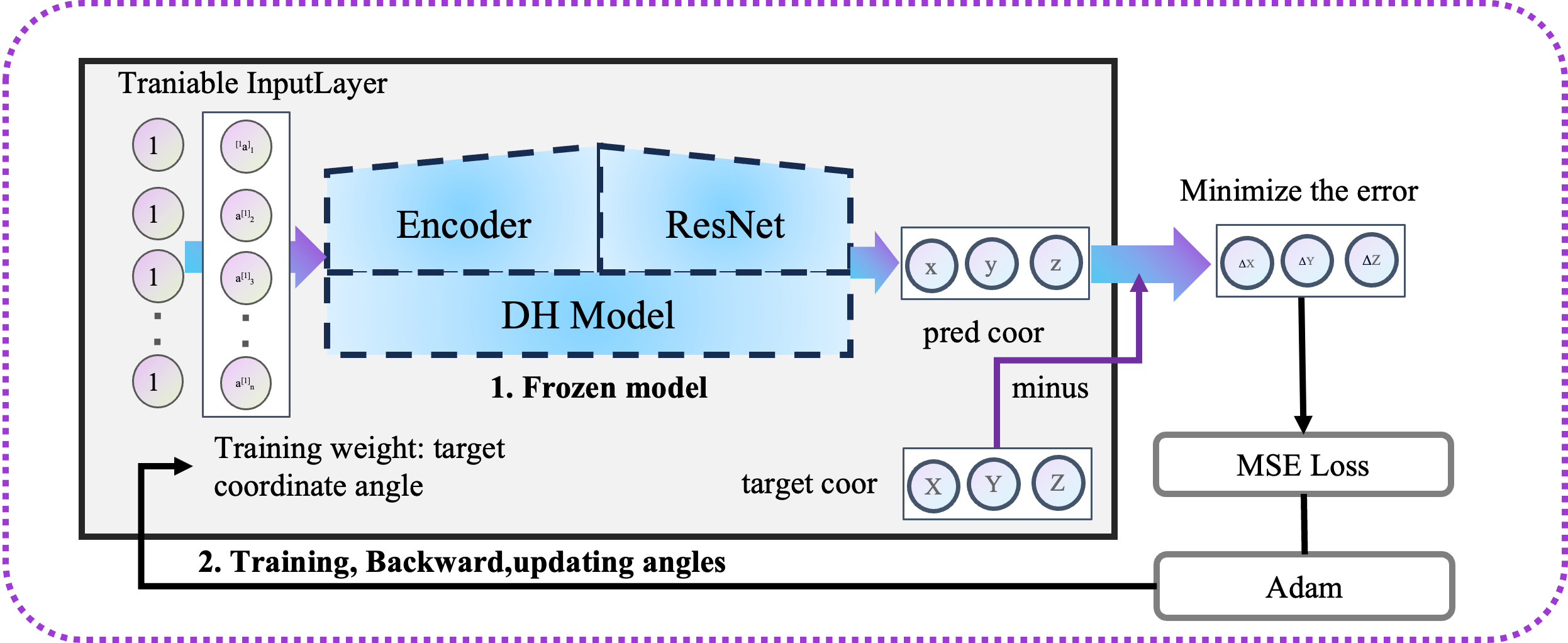
Figure 3: Inverse Angle Solving Algorithm Pipeline.
Hybrid Loss Function Design
SPI Loss Components
Enhancing the capability of the BoTER framework, a hybrid loss function is implemented. This loss function ingeniously combines data residuals with spatial-physical information (SPI) terms to ensure high-precision predictions that maintain physical consistency.
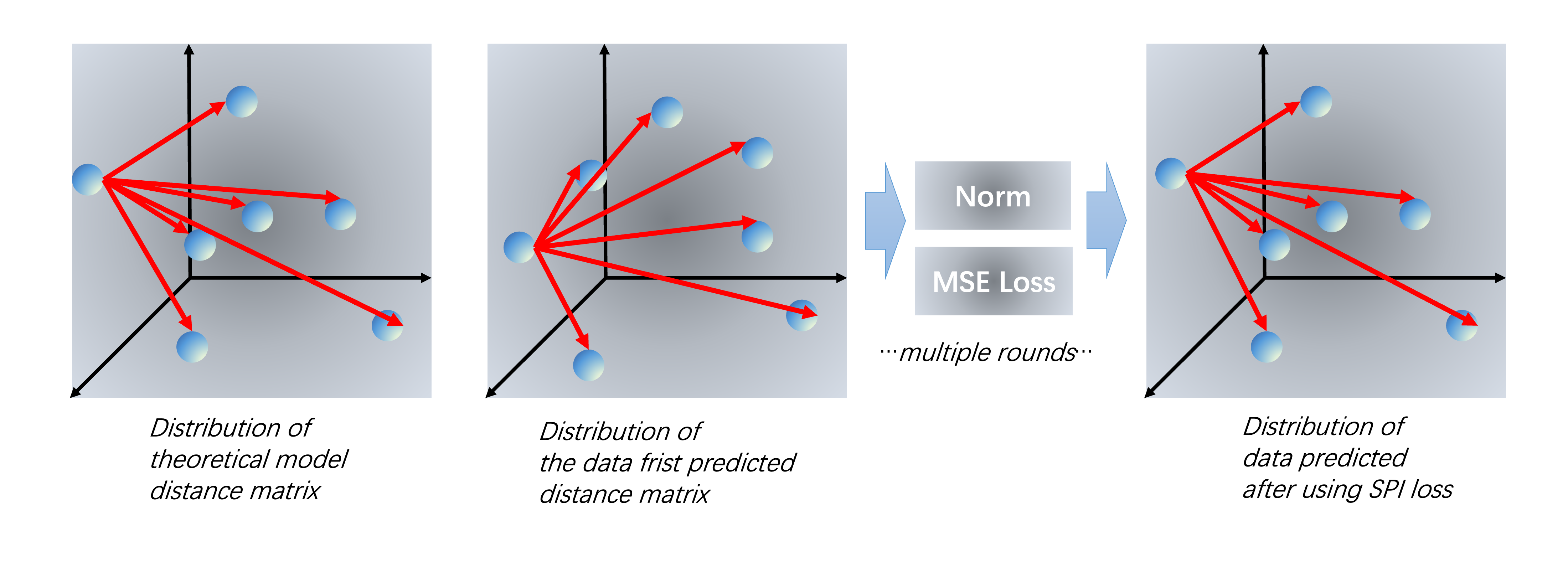
Figure 4: Simulation of one batch of training samples optimized using the SPI loss function.
Coupled with a novel dynamic weighting mechanism, the SPI loss layers adaptively balance between constraints and learned data patterns, producing robust, accurate predictions. The methodology also integrates a gradient-based inverse angle compensation algorithm, enabling joint-angle correction from predetermined positions within the given framework.
Experiments and Results
Dataset Acquisition and Model Training
This study employed a six-axis UR5 robotic arm alongside a TrackScan Sharp system for data collection. By randomizing the acquisition of 800 positional datasets, a comprehensive suite of training, validation, and test datasets was built, detailing precise position readings that map robotic joint angles to real-world positions.
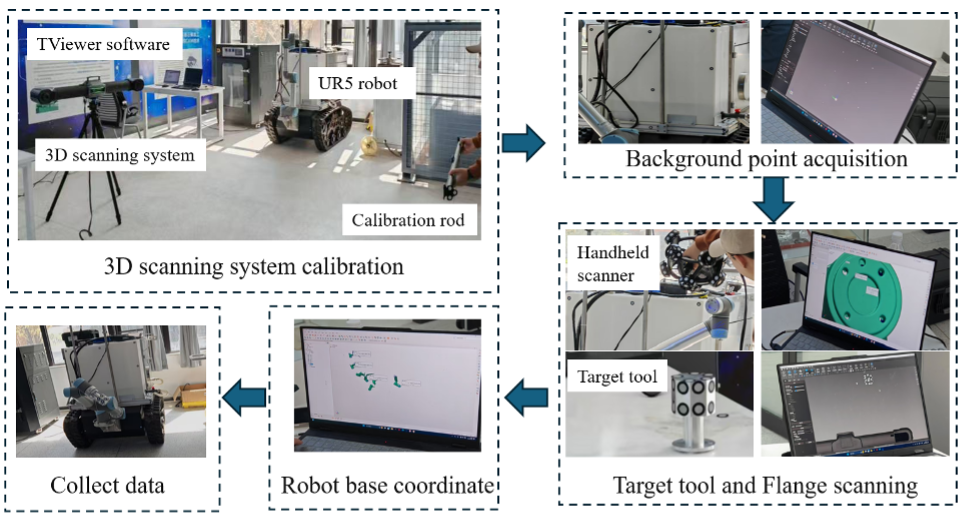
Figure 5: Experiments of error data collection.
The SPI-BoTER model was subject to iterative training across these datasets, ultimately achieving superior predictive performance with high fidelity. With impressive computational efficiency, the model demonstrated a minimal absolute positional error of just 0.2515 mm, outperforming baseline deep learning frameworks by a significant 35.16%.
Comprehensive assessments deployed MAE, RMSE, MSE, and R2 to evaluate model proficiency. These assessments affirmed the robust capabilities of SPI-BoTER, with all metrics indicating a substantial reduction in prediction errors relative to traditional approaches.
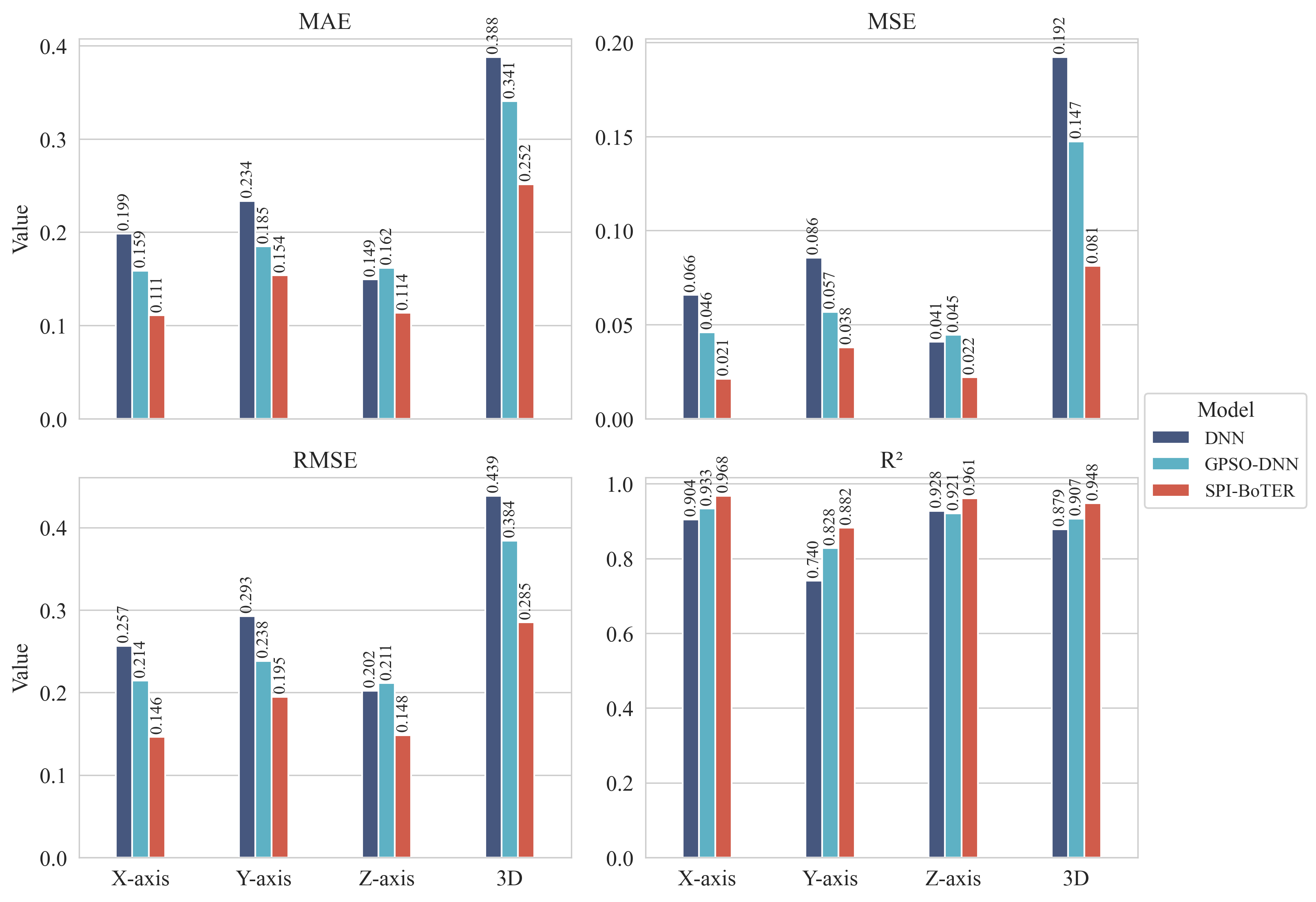
Figure 6: Performance Comparison between DNN and SPI-BoTER across MAE, MSE, RMSE, and R2.
DNN benchmarks demonstrated more substantial deviation than SPI-BoTER predictions, underscoring the enhanced error prediction efficacy associated with SPI-BoTER's dual-channel scheme. Experimental validation confirmed that SPI-BoTER successfully mitigates error accumulation, particularly in complex, high-fidelity tasks.
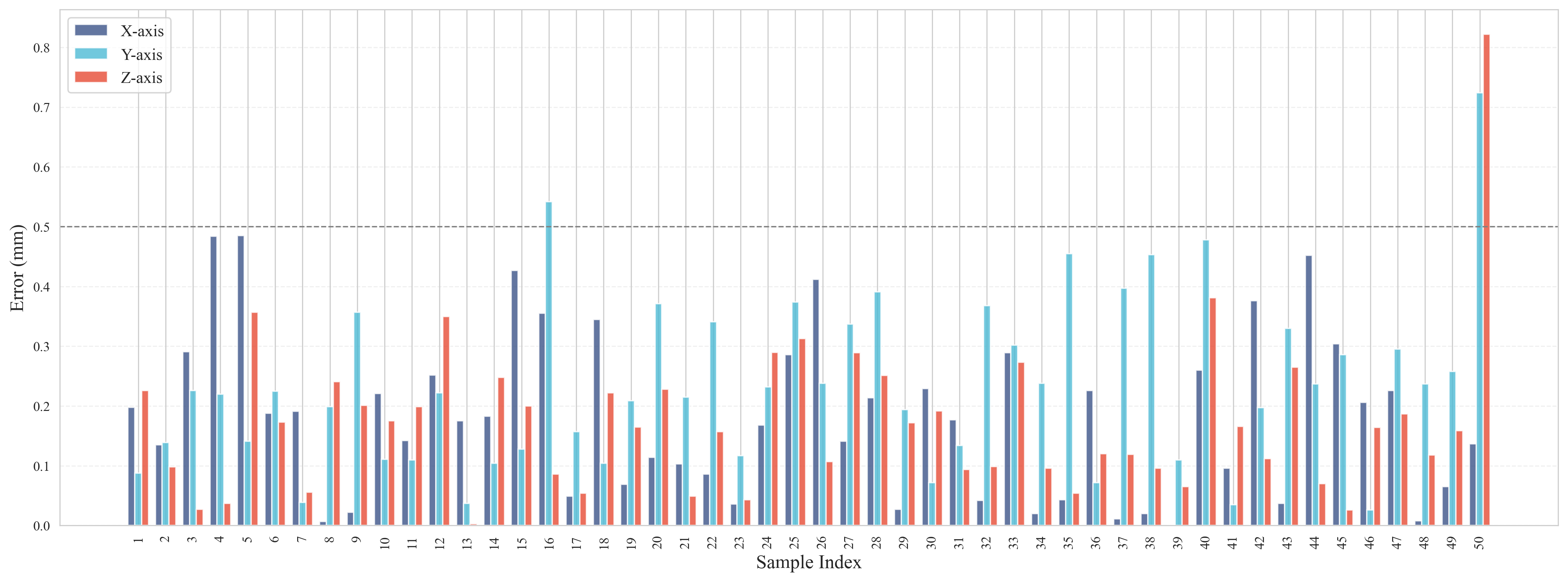
Figure 7: Position Error of 50 Randomly Sampled Test Points.
Conclusion
The SPI-BoTER framework offers a sophisticated solution for industrial robot error compensation, integrating innovative architectural components that meld physical insight with cutting-edge learning models. Despite notable achievements, ongoing challenges include extending the sparse attention mask's utility to varied robot types and improving model performance in dynamic motion tasks. Future research will prioritize addressing these challenges, particularly by incorporating temporal models to improve response in operationally diverse environments. Additionally, practical applications in high-end manufacturing systems will continue to inform iterative model refinements.