- The paper introduces a closed‐form scaling law (cube-root law) for selecting the optimal type count in heterogeneous mean field games, enhancing modeling fidelity.
- It presents a heterogeneity-aware PDHG algorithm that achieves up to 2.3× faster convergence and improved delay, throughput, and energy performance.
- Empirical results validate the framework’s ability to guarantee QoS with 100% satisfaction in large-scale vehicular networks under dynamic LEO backhaul conditions.
Heterogeneous Mean Field Game Framework for Scalable LEO Satellite-Assisted V2X Networks
Introduction and Motivation
The paper "Heterogeneous Mean Field Game Framework for LEO Satellite-Assisted V2X Networks" (2604.00621) addresses the question of scalable and heterogeneity-aware resource allocation in massive vehicular networks with LEO satellite backhaul. Future V2X deployments will coordinate fleets of 104–105 vehicles exhibiting diverse behaviors—passenger cars, trucks, and autonomous vehicles—each imposing distinct data and QoS requirements. In this context, homogeneous mean field game (MFG) models are inadequate; they overlook meaningful physical and economic distinctions across vehicle classes. Heterogeneous MFGs (HMFG) provide the necessary type-level granularity but introduce a delicate model selection problem: finer class granularity improves modeling fidelity but reduces the representative sample size per type, undermining mean-field approximation accuracy.
In large N regimes, coordination based on exact Nash equilibria becomes computationally intractable (O(N2) complexity). Prior work has developed scalable MFG-based optimizations, e.g., via primal-dual methods with complexity independent of N [kang2023time], but the agent-type resolution (i.e., number K of types) has remained a heuristic, unprincipled selection—fixed arbitrarily, often K=1,2,3 [zhang2022hmfmarl, xu2025joint]. The core contribution of this paper is a closed-form, theoretically justified scaling law for optimal type-count K∗(N), a heterogeneity-aware equilibrium solver, and robustness guarantees under realistic LEO backhaul dynamics.
Consider a V2X system where an RSU equipped with MEC must allocate communication and compute resources to a mixed fleet (N vehicles) over a time horizon [0,T]. Each vehicle's state is a queue length process with type-dependent arrival rates, energy-delay trade-off weights, and hardware/action constraints. The population is partitioned into 1050 types, and each type may have distinctive queue dynamics, cost preferences, and control spaces. State evolution is governed by SDEs, and resource sharing induces cross-type coupling via interference and computational surcharge terms.
The HMFG setting leads to 1051 coupled HJB-FPK systems with congestion feedback, where each type's best-response is parameterized by the mixed fleet mean field. The LEO satellite augmentation introduces additional nonstationarity via piecewise-constant backhaul rates and time-varying computation surcharge.
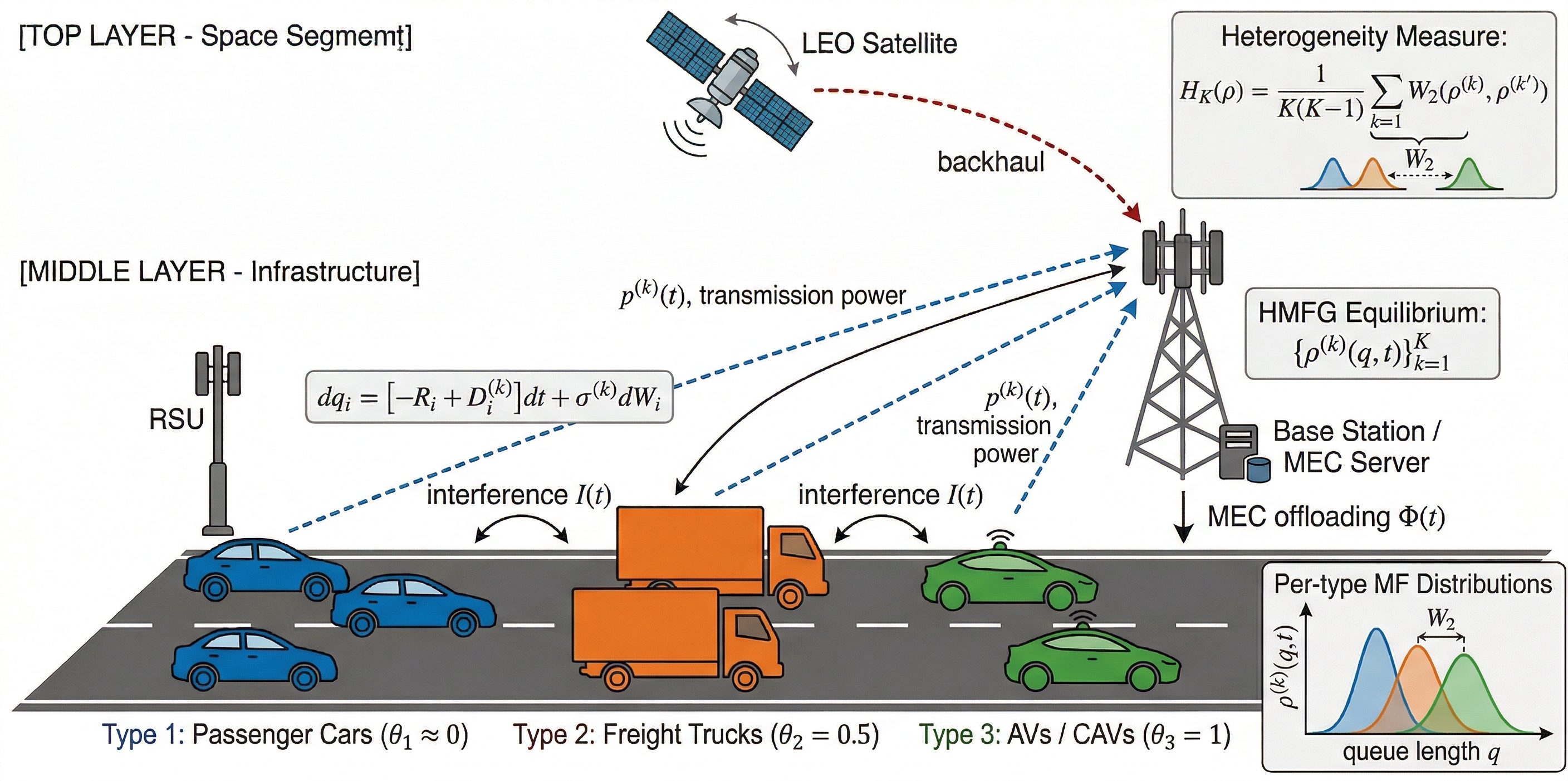
Figure 1: V2X–MEC scenario with K vehicle types, cross-type mean field interaction, and LEO backhaul for modeling dynamic network conditions.
Type Granularity: Theoretical Foundation
Error Decomposition
The central technical advance is an explicit decomposition of the 1052-Nash approximation error for the 1053-type HMFG:
1054
Here, 1055 is the type-discretization bias (how well 1056 types represent true fleet heterogeneity) and 1057 is the sample variance term due to finite class size. The exponents 1058 (empirical measure convergence rate) and 1059 (drift regularity in type) depend on the state-space and model class; N0 in 1D, N1 in 2D settings (with logarithmic corrections), and N2 for Lipschitz class parametrizations.
Minimizing N3 analytically yields a unique optimal type count:
N4
In canonical 1D queue-state settings, this delivers the cube-root law, N5. For modern fleets (N6), only N7 is necessary, a dramatic reduction relative to the vehicle count.
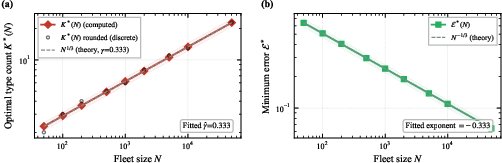
Figure 2: Validation of scaling-law—empirical optimal N8 closely matches N9; adaptive selection achieves orders-of-magnitude reduction in approximation error compared to fixed-O(N2)0 Heterogeneous/Homogeneous baselines.
The methodology also incorporates unbalanced fleet populations. When class sizes are heavily skewed (e.g., 10% autonomous vehicles), the optimal O(N2)1 is further reduced by a factor depending on the smallest class fraction, accommodating practical deployment realities.
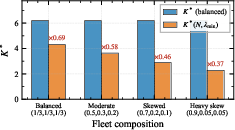
Figure 3: O(N2)2 and O(N2)3-Nash error for balanced (uniform) versus heavily skewed fleets; optimal type count decreases with minimal class proportion as predicted theoretically.
Heterogeneity-Aware HMFG Solver Design
Algorithmic Pipeline
The authors present a modular solution workflow:
- Type Selection Algorithm: Uses closed-form formula for O(N2)4, adjusting for heterogeneity (quantified via Wasserstein distance), composition skew, and LEO topology variation.
- Heterogeneity-Aware Step Size Adaptation: Primal-dual hybrid gradient (PDHG) steps are tuned according to observed instantaneous heterogeneity, with explicit correction terms to guarantee convergence in the presence of strong cross-type coupling.
- Efficient Mean Field Equilibrium Solver: Parallelized, vehicle-count-independent complexity O(N2)5, with pipeline compatibility for LEO-augmented, time-varying optimal controls.
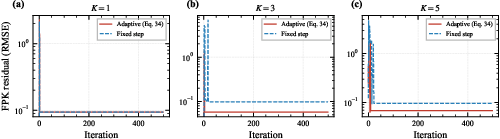
Figure 4: PDHG residuals—heterogeneity-aware adaptive step-sizes enable O(N2)6 convergence speedup compared to fixed step-size protocols.
Complexity and Scalability
Empirically, the per-iteration complexity grows as O(N2)7 (since O(N2)8), equivalently O(N2)9 independent of N0. This is a clear advantage over direct-multiagent (MARL) or model-free methods, whose costs scale with the size of the state-action space or N1.
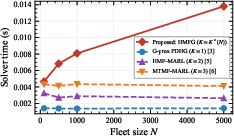
Figure 5: Wall-clock iteration runtime—proposed method exhibits sublinear scaling in N2, maintaining efficiency in massively large fleet regimes.
Empirical Results
Comprehensive experiments confirm the theoretical findings and exhibit strong numerical improvements over homogeneous and fixed-type baselines:
- Delay Reduction: Up to N3 lower average transmission delay; at N4 all vehicles satisfy the V2X latency threshold (100ms), while the homogeneous solver achieves only N5 satisfaction.
- Throughput and Reliability: N6 higher per-vehicle throughput and N7 lower packet loss compared to G-prox.
- Energy Efficiency: N8 reduction in energy per transmitted bit.
- Robustness: Under LEO backhaul dynamics, only a negligible error penalty is incurred, and order-optimal N9 scaling is preserved provided topology variation is not pathologically severe.
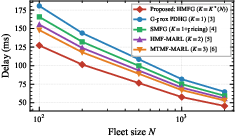
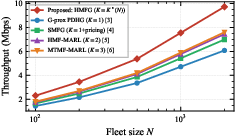
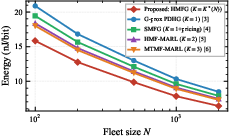
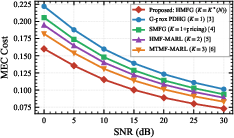
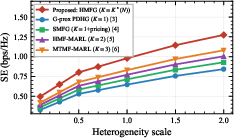
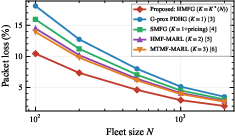
Figure 6: Six-KPI performance profile—proposed HMFG achieves lowest transmission delay, highest throughput, and lowest energy/bit, outperforming all fixed-type baselines.
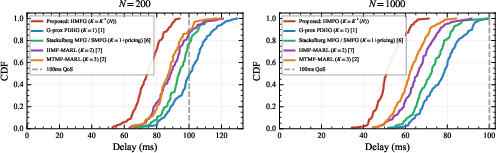
Figure 7: Transmission delay CDF—proposed method guarantees 100% QoS below 100ms at K0; G-prox achieves only 48.3%. Mean-field averaging at K1 gives universal satisfaction, but mean-delay ordering remains optimal for type-adaptive solutions.
Practical and Theoretical Implications
The principal implication is that type-granularity selection in HMFGs can be principled, computable, and fixed system-design choice. Type count should scale sublinearly with K2; excessive partitioning worsens mean-field approximation due to undersampled classes, while excessively coarse models fail to capture critical operational heterogeneity. The provided law is dimension- and heterogeneity-dependent and is robust to moderate non-stationarities introduced by dynamic LEO satellite backhaul.
Additionally, adaptive step-sizing enables safe, rapid solver convergence even as heterogeneity and non-stationarity increase. The entire pipeline is compatible with RSU–MEC architectures and practical for online plug-and-play deployment.
Future Directions
Potential extensions include:
- Global (as opposed to local) well-posedness for HMFGs under unbounded time horizons or severe LEO topology perturbation.
- Joint optimization for higher-dimensional joint queue-channel models and semantic-aware codebook integration.
- Hybridization with optimization-driven DRL to handle partial/abrupt knowledge or adversarial uncertainty regimes.
Conclusion
This work rigorously quantifies the optimal model granularity needed for scalable, robust V2X coordination under strong agent heterogeneity and dynamic LEO backhaul. The cube-root law for agent types, per-iteration complexity guarantees, and strong practical gains demote type granularity from a heuristic to a controlled, system-level design parameter. These results establish a new baseline for analytical and deployable large-scale vehicular network control via mean field games.

