- The paper introduces a hybrid force-motion control framework that leverages real-time surface normal estimation to dynamically counteract friction in manufacturing tasks.
- The proposed methodology employs a 7-DoF manipulator with force/torque sensing in a ROS2 environment to update kinematic and force feedback, significantly reducing positional error.
- Experimental validations demonstrate up to a 5% improvement in positional accuracy on complex surfaces, underscoring the practical robustness of the approach.
Hybrid Force Motion Control with Estimated Surface Normal for Manufacturing Applications
This paper presents an innovative hybrid force-motion control framework designed to enhance the precision of manufacturing tasks. It utilizes real-time surface normal updates derived from a novel friction compensation strategy that leverages force measurements. This enables more accurate force-controlled task execution, particularly in complex environments with surface deviations.
Robotic System Framework
A 7-DoF manipulator forms the core of the proposed robotic system, equipped with a force/torque (F/T) sensor and a probe at the end-effector. This setup enables dynamic force control across various workpieces by adjusting the end-effector path in reaction to real-time feedback (Figure 1).
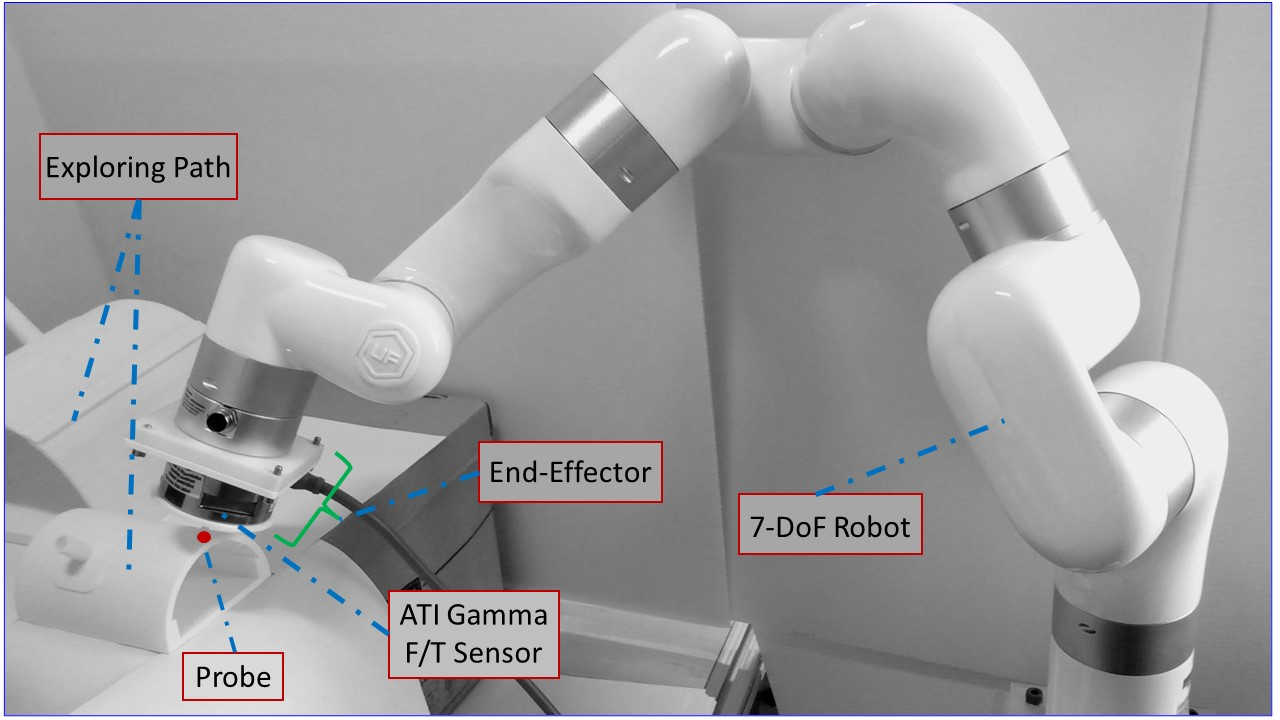
Figure 1: The Robotic System Framework: A 7-DoF Manipulator Equipped with an F/T Sensor and Probe at the End-Effector, Including Workpieces.
The system operates within a ROS2 environment, where kinematic and dynamic models of the manipulator facilitate the hybrid control operations. The precise interaction with the environment is achieved through real-time surface normal estimations, which are crucial for tasks requiring high-precision force application, such as grinding or thermoplastic tape laying.
Hybrid Force-Motion Control Model
The hybrid force-motion control model is systematically designed to address both position and force control in manufacturing applications (Figure 2). The approach encompasses a dynamic adaptation to surface interactions, significantly enhancing robustness in path tracing tasks on workpieces with uncertain configurations.
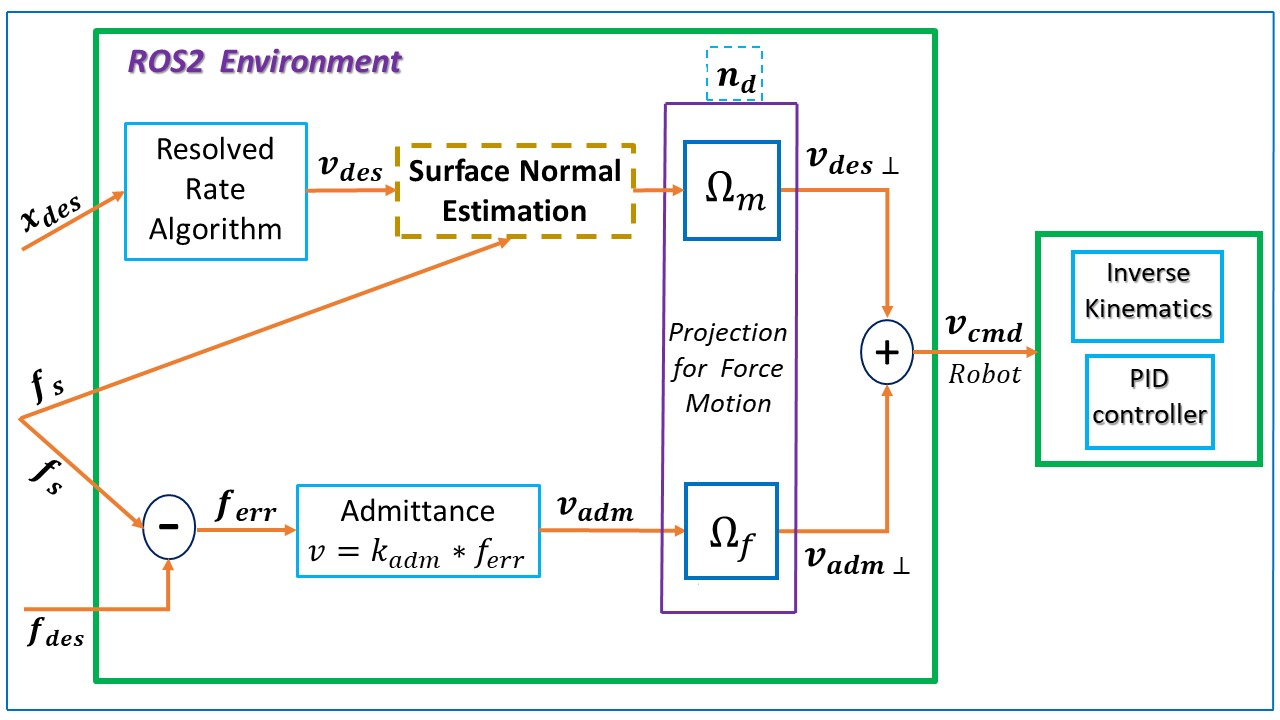
Figure 2: Hybrid Force-Motion Controller.
Surface Normal Estimation
The method leverages an algorithm for estimating surface normals using a combination of force feedback and kinematic projections. This approach compensates for environmental friction dynamically during operations, ensuring the force controller calculates optimal force vectors for task execution. The algorithm performs iterative updates on surface normal estimation by constructing a friction model, utilizing weighted averages of velocity and force components (Figure 3).
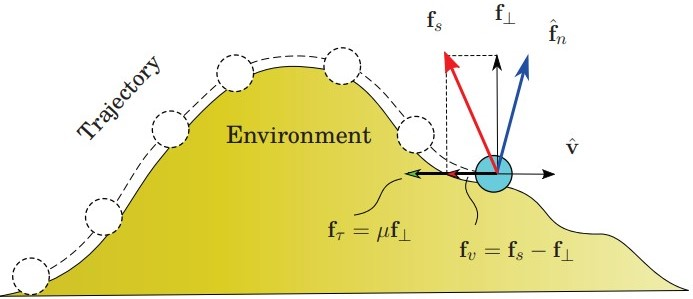
Figure 3: Estimation of Surface Normal Force Compensating for Environmental Friction.
Implementation and Validation
Implementation involves detailed kinematic simulations and experimental validations using the proposed estimation algorithm. Experimental results demonstrate significant reductions in positional error during force-controlled task execution (Figure 4).
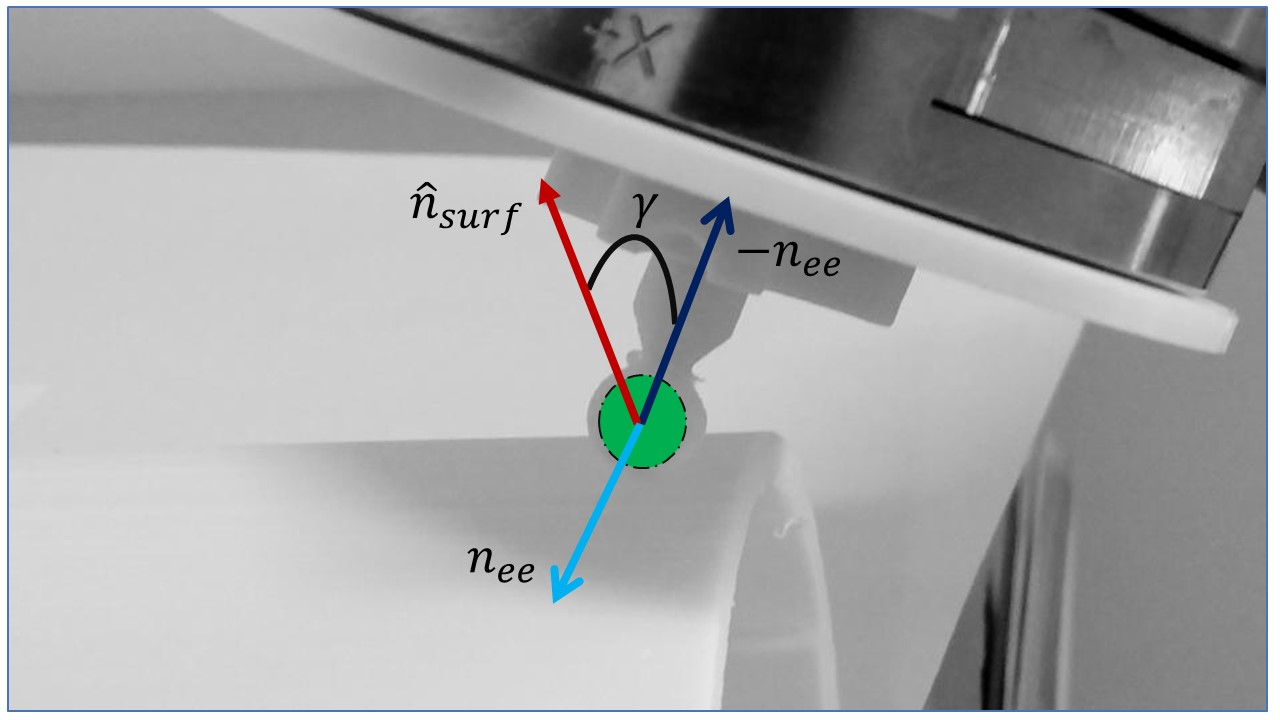
Figure 4: Optimizing Probe Orientation: Utilizing Estimated Surface Normal and End-Effector Directions.
The algorithm's effectiveness is measured through path-tracing tasks on surfaces such as sine-shaped and linear paths, where surface normal estimation substantially improves accuracy (Figure 5). The method exhibits a typical positional accuracy increase of up to 5% in real-time applications compared to static normal strategies.
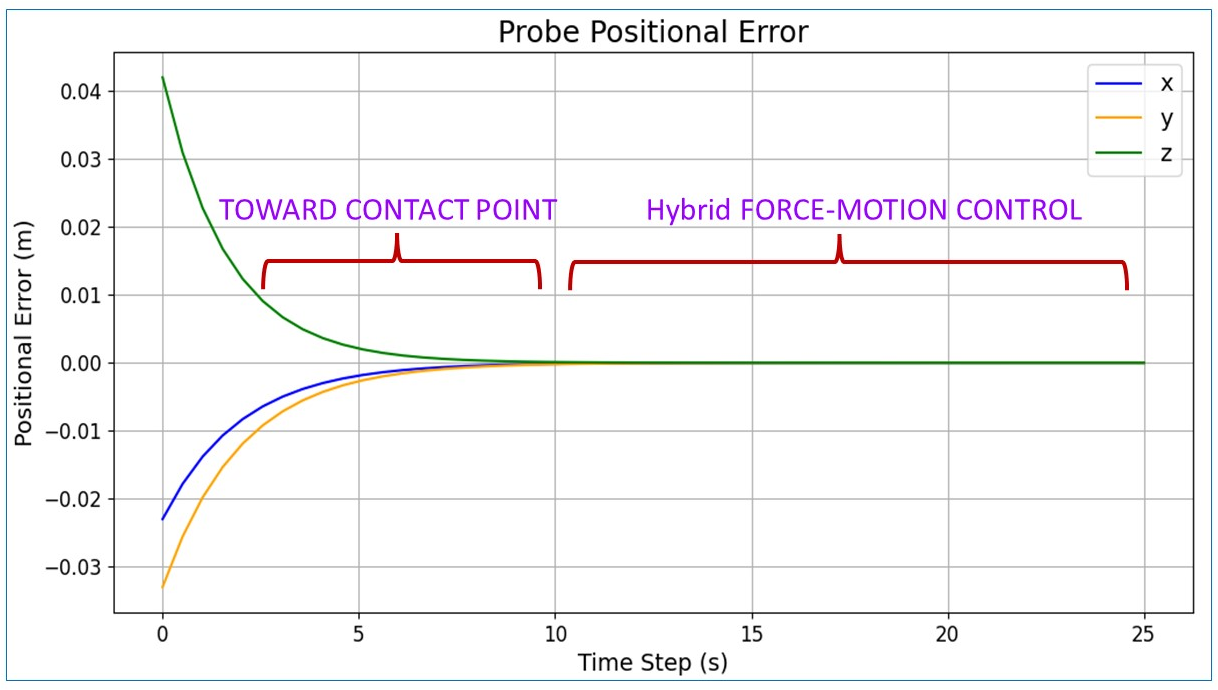
Figure 5: Tracking Hybrid Motion-Force Errors of the Probe.
The paper introduces a methodologically sound approach to resolving common issues in force-controlled robotic tasks in manufacturing. By continuously estimating and updating the surface normal, the framework enhances precision and mitigates the impact of friction. This advancement showcases the potential to improve existing force-motion control techniques significantly. The proposed real-time estimation method is anticipated to be integrated into various manufacturing processes, aligning robotic operations closer to complex human tasks, thereby expanding automation potential in nuanced environments. Future work will focus on refining these algorithms for broader applications and improving computational efficiencies for real-world implementations.