Olaf: Bringing an Animated Character to Life in the Physical World
Abstract: Animated characters often move in non-physical ways and have proportions that are far from a typical walking robot. This provides an ideal platform for innovation in both mechanical design and stylized motion control. In this paper, we bring Olaf to life in the physical world, relying on reinforcement learning guided by animation references for control. To create the illusion of Olaf's feet moving along his body, we hide two asymmetric legs under a soft foam skirt. To fit actuators inside the character, we use spherical and planar linkages in the arms, mouth, and eyes. Because the walk cycle results in harsh contact sounds, we introduce additional rewards that noticeably reduce impact noise. The large head, driven by small actuators in the character's slim neck, creates a risk of overheating, amplified by the costume. To keep actuators from overheating, we feed temperature values as additional inputs to policies, introducing new rewards to keep them within bounds. We validate the efficacy of our modeling in simulation and on hardware, demonstrating an unmatched level of believability for a costumed robotic character.


Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
Olaf: Bringing a Cartoon Character to Life as a Real Walking Robot
Overview
This paper explains how Disney researchers turned Olaf (the snowman from Frozen) into a real, walking robot that looks and moves like the animated character. The big challenge: Olaf’s cartoon body is not shaped like a normal robot. He has a huge head, tiny “snowball” feet, and no visible legs. The team designed special hidden mechanics and taught the robot to move in a believable, gentle way using reinforcement learning (a type of AI training).
The Big Questions
The researchers set out to answer a few key questions:
- How do you build a robot that looks like Olaf (big head, tiny feet, no visible legs) without ruining the illusion with obvious robot parts?
- How can the robot walk and gesture like the animated Olaf, not like a stiff machine?
- How can you keep the robot quiet (no loud clunks) and safe (no overheating), especially since the head is heavy and the motors in the neck are small and covered by a costume?
How They Built and Controlled Olaf
Mechanical design highlights
To make Olaf look right and still move well, the team:
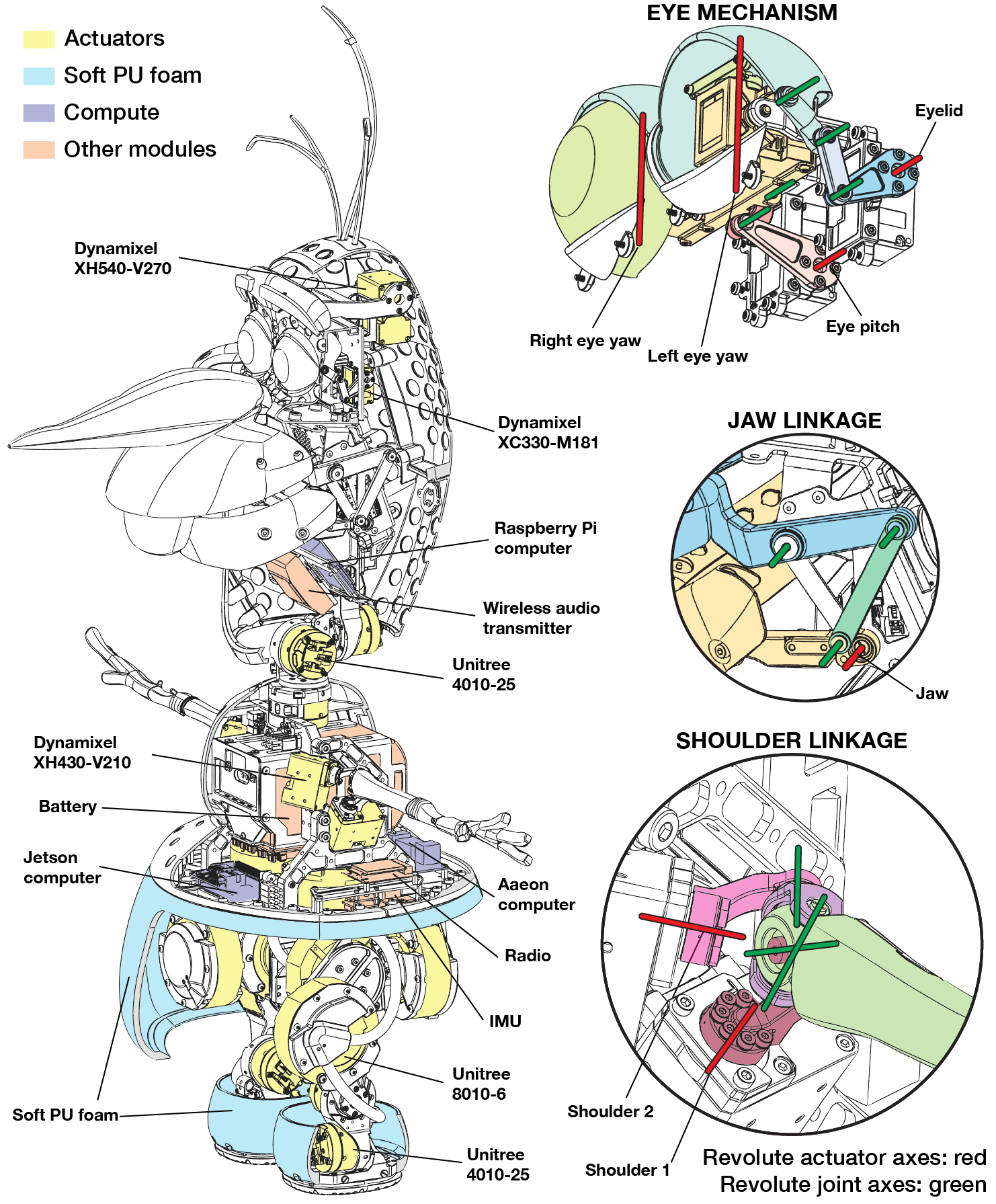
- Hid two real robot legs inside the lower “snowball” and covered them with a soft foam “skirt.” From the outside, it looks like Olaf’s feet glide under his body just like in the movie.
- Gave the legs a clever asymmetric layout (the left and right legs are not mirror images). This saves space, avoids parts bumping into each other, and expands how far the feet can move inside the body.
- Used linkages (systems of rods, like a set of connected levers) to move the arms, eyes, and mouth from motors placed elsewhere. This keeps motors hidden and compact while still achieving expressive motion.
- Made the shells and foot “snowballs” from flexible foam to keep the shape but allow bendy movement and soften impacts if Olaf stumbles.
- Attached the arms, nose, eyebrows, buttons, and hair with magnets so they stay put during normal use but can pop off safely if Olaf falls.
Teaching Olaf to move (reinforcement learning)
To make Olaf walk and stand like the animated character, they used reinforcement learning (RL):
- Think of RL like a video game: the robot tries actions, gets a score (a “reward”) based on how well it matches the animator’s reference motion, and learns to improve over time.
- They trained two “policies” (brains): one for standing, one for walking.
- The robot’s goal is to imitate the artist’s animated poses and timing, while also staying balanced and smooth in the real world.
They used animation references (the “ideal” Olaf motions) and had the RL policy learn to match them. A special moving coordinate system (like an imaginary chalk line Olaf follows) keeps the robot’s sense of direction and position consistent so it can smoothly switch between motions.
Keeping it quiet and cool
Two big real-world problems had to be solved:
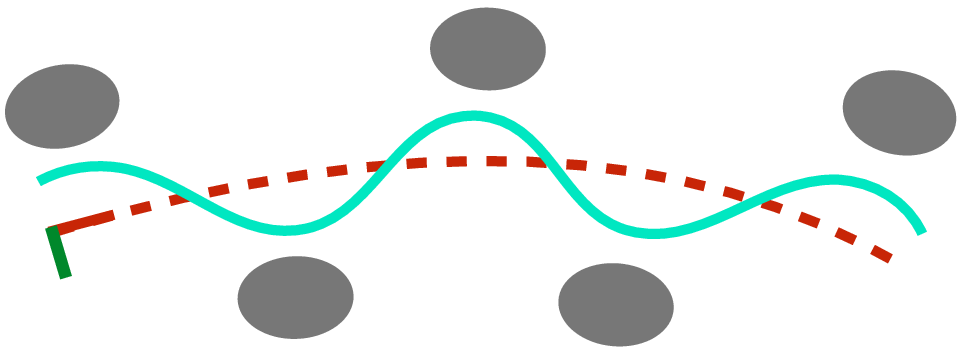
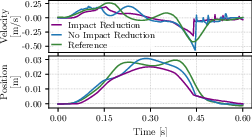
- Footstep noise: Hard impacts sound robotic and break the illusion. The team added a “step softly” reward that teaches the robot to reduce sudden vertical speed when the foot touches the ground—like learning to tiptoe.
- Overheating: Olaf’s big head and tight neck space can overheat the small neck motors, especially under a warm costume. The team:
- Built a simple heat model that estimates how motors warm up based on how hard they’re working.
- Fed motor temperatures into the RL policy so it “knows” when things are getting hot.
- Added “safety guardrails” (called control barrier functions) that gently push behavior away from danger. In simple terms, these are rules that say “as you get closer to too hot, reduce effort so temperature stops rising.”
They also used similar guardrails to keep joints away from physical end-stops (so Olaf doesn’t jam his joints).
Puppeteering at runtime
When Olaf performs:
- A puppeteer uses a controller.
- An animation engine blends background motions (like subtle eye movements), triggered actions (like gestures or lines), and live joystick control (for gaze and walking direction).
- The RL policy runs on the robot’s computer at high speed, turning these commands into smooth joint motions.
What They Found
Here are the main results and why they matter:
- Believable movement: The robot closely followed the animator’s motion style. Average joint tracking errors during standing and walking were around 4 degrees, which looks smooth to the eye.
- Softer, quieter footsteps: The “step softly” reward reduced the average walking noise by 13.5 dB in tests—clearly noticeable and more lifelike.
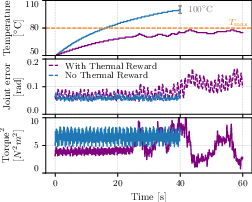
- Safer temperatures: With the thermal-aware policy, the neck motors warmed up much more slowly and stayed within safe limits, even with a heavy head and warm costume. The robot kept tracking well at normal temps and gently relaxed tracking only when nearing heat limits to avoid overheating.
- Reliable design: The asymmetric hidden legs, flexible foam skirt, and linkage-driven face and arms allowed Olaf to look right and move expressively without exposing mechanical parts.
Why It Matters
This work shows how to bring a non-robot-shaped animated character into the real world without losing the magic:
- It blends art and engineering: design that preserves appearance, plus AI control that preserves motion style.
- It adds practical AI ideas for real-world robots: learning to move quietly, and staying within temperature and joint safety limits.
- It opens doors for entertainment robots, theme parks, and friendly social robots that need to be safe, quiet, and believable around people.
Final Thoughts and Future Directions
The project sets a new bar for costumed, character-like robots that don’t look or move like typical machines. Next steps could make it even better:
- Smarter heat models that also consider friction and long-term warming of the robot’s outer parts.
- Better simulation of how the costume pushes and pulls on the robot, so training relies less on random disturbances and more on accurate virtual dress effects.
In short, the team successfully brought Olaf to life as a compact, quiet, and expressive robot—one that looks and feels like the character people know and love.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
Below is a single, actionable list of what remains missing, uncertain, or unexplored in the paper, intended to guide future research.
- Absence of quantitative robustness metrics for locomotion (e.g., success rates, recovery behavior, fall statistics) across varied terrains (slopes, stairs, uneven/soft surfaces), environmental conditions, and external disturbances.
- Unclear operating envelope for locomotion (maximum/steady walking speed, turning radius and rate, acceleration/deceleration limits, step height variability, and gait transitions), and how these affect believability and stability.
- No user studies or psychometric evaluation to substantiate claims of “unmatched believability”; lacks validated perception metrics for style fidelity, naturalness, and perceived realism across audiences.
- Impact-noise evaluation limited to a single 5-minute hardware run; lacks analysis across floor materials, walking speeds, gait phases, and ambient noise levels, and does not include perceptual thresholds for human observers or guest environments.
- Thermal model is first-order and neglects mechanical heat sources (friction, gear losses), thermal coupling between neighboring actuators, heat conduction to structural components, and variable airflow under different costume configurations; open question on multi-actuator thermal interactions and ambient condition variability.
- Thermal safety is enforced via a CBF-inspired reward penalty rather than hard constraints; no formal safety filter/controller (e.g., QP with barrier constraints) or on-board supervisory mechanism ensuring guaranteed adherence to thermal limits under all conditions.
- Temperature observations are clipped during training, potentially inducing distribution shift; lacks systematic study of generalization across full temperature ranges, ambient temperatures, humidity, and airflow changes inside the costume.
- Sim-to-real gap is not characterized beyond tracking and single-case thermal/audio results; missing systematic comparison of contact forces, foot impact velocities, friction coefficients, and joint-limit behaviors between simulation and hardware.
- No ablation studies of reward terms and weights; unclear contribution of each component (imitation, limits, impact reduction, regularization) to style fidelity, noise reduction, stability, and thermal safety, or trade-offs between these objectives.
- The impact-reduction reward penalizes vertical velocity changes but may increase slip risk or reduce energetic efficiency; lacks analysis of side effects on stability, contact mechanics, and energy consumption.
- Domain randomization used to approximate costume–leg interaction forces, but costume mechanics are not explicitly modeled; open path to build reduced-order or data-driven fabric/foam interaction models and measure their effect on control robustness.
- Lack of instrumentation for costume-induced loads (e.g., distributed force/torque sensing at contact points) and absence of online adaptation to changing costume conditions (stretch, moisture, aging).
- Show-function mappings (eyes, arms, jaw) rely on polynomial fits with limited reported accuracy; no quantitative residual errors, robustness to load variations, or online calibration to compensate for drift/fabric tension changes.
- Jaw feedforward model is simple (linear + cosine) and calibrated offline; missing evaluation under dynamic speech, fast actuation, and changing costume tension, and the need for adaptive or learning-based compensation.
- Path-frame behavior and constraints are not evaluated under aggressive maneuvers (rapid joystick changes, abrupt policy switches); unclear failure modes (drift, misalignment) and strategies for safe policy blending.
- Policy runs at 50 Hz and is upsampled to 600 Hz; no study of how policy rate, filtering, and actuator bandwidth influence tracking accuracy, noise, and thermal load, or how to optimally co-design these parameters.
- Critic uses privileged information (terrain heights, friction parameters) unavailable on hardware; lacks evaluation of how removing privileged signals impacts performance and how to integrate perception or estimation to bridge this gap.
- No exploration of multi-objective or human-in-the-loop reward learning to balance style fidelity, audio quietness, and thermal safety based on audience preference data or designer constraints.
- Foot–foot collision prevention is treated via penalties without detailing real-time detection on hardware; open question on sensing strategies (proximity, tactile) and reflexive responses to imminent self-collision.
- Energy use, battery life, and overall efficiency are not reported; missing analysis of power budgets under different behaviors and the trade-off between believability (stylistic motion) and energy consumption.
- Mechanical durability and maintenance over time (foam skirt wear, magnet breakaway reliability, linkage backlash, actuator cycle life) are unquantified; need for longitudinal testing and design-for-maintainability guidelines.
- Safety in human environments (contact compliance, pinch points, fail-safe modes, emergency stops, standards compliance) is not analyzed; requires formal hazard assessment and validation for guest-facing deployments.
- Generalization to other characters with different proportions and motion styles remains untested; needs methodology for re-targeting the design/control pipeline and quantifying transfer difficulty.
- No explicit strategy for co-optimizing whole-body locomotion and upper-body show functions to avoid mutual interference; opportunity to study coordinated multi-DoF motion synthesis with expressiveness constraints.
- Reproducibility limits: detailed CAD, linkage parameters, controller code, and training data are not provided; clearer documentation and open artifacts would enable benchmarking and further research.
Practical Applications
Below are actionable applications derived from the paper’s mechanical design, RL control methods, and integration workflow. Each item lists representative sectors, possible tools/products/workflows, and the main dependencies or assumptions that affect feasibility.
Immediate Applications
The following can be deployed or prototyped with current tools, components, and practices.
- Deployable mobile animatronics for theme parks, museums, retail, and live events (Sectors: entertainment, retail experiences)
- What: Believable, safe, costumed characters with expressive arms/eyes/mouth, quiet footsteps, and live puppeteering.
- Tools/products/workflows: RL policies that imitate artist-created animation references; Animation Engine with layered background/triggered/joystick control; soft foam shells, magnetic breakaway appendages; spherical/planar linkages for remote actuation; asymmetric 6-DoF leg mechanism hidden under a “skirt.”
- Dependencies/assumptions: Access to animation assets and rigging; stage safety approvals; operator training; flat and predictable flooring; on-board compute; battery/runtime management.
- Practical characters for film/TV production with minimal audio contamination (Sectors: media production)
- What: On-set physical characters controllable by performers with substantially reduced footstep noise (paper reports ~13.5 dB reduction).
- Tools/products/workflows: Quiet-gait RL reward; puppeteer interface; expressive show-functions controlled via PD plus feedforward (jaw).
- Dependencies/assumptions: Sound-stage constraints; integration with VFX pipelines; reliable wireless control; mechanical access for costumes.
- Quiet locomotion upgrade for indoor robots in noise-sensitive spaces (Sectors: healthcare, education, office facilities, hospitality)
- What: Noise-aware RL reward to minimize vertical velocity changes at foot impact, yielding quieter steps without losing gait style.
- Tools/products/workflows: Add impact-reduction term to existing legged-robot training; deploy on hospital guides, library concierges, classroom robots.
- Dependencies/assumptions: Existing RL locomotion stack; willingness to trade peak speed/efficiency for acoustics; verification with SPL meters.
- Thermal-aware actuator control to prevent overheating (Sectors: robotics, manufacturing, research labs)
- What: Integrate actuator temperature into observations and use CBF-inspired rewards to keep temperatures within bounds.
- Tools/products/workflows: First-order thermal model fit from data; policy retraining with temperature constraints; safety limits tied to torque demand.
- Dependencies/assumptions: Temperature sensing on actuators; enough data to fit model parameters; acceptance of small tracking relaxations near limits.
- Compact linkage modules for constrained form factors (Sectors: robotics hardware, consumer robotics, toy industry)
- What: Spherical 5-bar shoulder linkages, planar/spherical linkages for facial mechanisms, and asymmetric leg layouts to maximize workspace in tight shells.
- Tools/products/workflows: Off-the-shelf servo/actuator kits integrated with custom linkages; mechanical design references from the paper; CAD templates.
- Dependencies/assumptions: Precision manufacturing; structural stiffness vs. weight trade-offs; maintenance access within costumes/enclosures.
- Show-function mapping toolkit for expressive appendages (Sectors: animatronics, HRI, edtech robots)
- What: Map artist-friendly “functional space” (eye yaw/pitch, eyelids, arm swing/pitch, jaw pose) to actuator commands via polynomial fits and PD control.
- Tools/products/workflows: Automated sampling of functional space; polynomial fitting; feedforward compensation for fabric/cover loads (jaw).
- Dependencies/assumptions: Accurate forward kinematics; mechanism-specific calibration; stable PD gains.
- Teleoperation and performance workflow for human-in-the-loop control (Sectors: entertainment, training simulators)
- What: Performer puppeteers robot with layered background loops, triggered clips, and joystick-driven adjustments (gaze, velocity, posture).
- Tools/products/workflows: Real-time Animation Engine; interface hardware (gamepad); policy switching between standing and walking.
- Dependencies/assumptions: Low-latency wireless; intuitive UI; rehearsed content library.
- Safety-by-design patterns for human-facing robots (Sectors: robotics product safety, consumer robotics)
- What: Soft shells to absorb contact; fabric with “boning” for shape retention; magnetic attachments that break away to reduce damage/injury risk.
- Tools/products/workflows: PU foam skins; standardized magnetic fixtures; rapid reattachment procedures for backstage crews.
- Dependencies/assumptions: Compliance with safety standards; durability under repeated detachments; cleaning and wear considerations.
- Academic benchmarks for RL with long-timescale constraints and contact acoustics (Sectors: academia, research tools)
- What: Use thermal-aware and impact-aware rewards to study multi-timescale objectives and contact-sound minimization.
- Tools/products/workflows: Isaac Sim environments with temperature states; public reward formulations; open baselines for imitation + CBF-inspired constraints.
- Dependencies/assumptions: Access to simulation compute; reproducibility of thermal datasets or synthetic equivalents.
- Procurement guidance and policy pilots on acoustics for indoor robots (Sectors: public facilities, standards bodies)
- What: Use the demonstrated methods as reference for specifying maximum footfall noise in RFPs and pilot standards.
- Tools/products/workflows: Test procedures linking vertical contact velocity or SPL to acceptance criteria.
- Dependencies/assumptions: Stakeholder buy-in; measurement standardization; environment-dependent baselines.
Long-Term Applications
These require further research, scaling, or standardization to become broadly deployable.
- “Animation-to-Robot Compiler” for broad character libraries (Sectors: software, entertainment robotics)
- What: A turnkey toolchain that ingests rigs/animations from DCC tools (e.g., Maya/Blender) and outputs validated RL policies and actuator mappings for various robot morphologies.
- Tools/products/workflows: Automatic reference generation with phase variables; policy training in sim with domain randomization; verification harnesses.
- Dependencies/assumptions: Generalizable sim-to-real bridges; automated collision/limit/thermal constraints; IP rights management for character assets.
- Autonomous social robots with cinematic believability (Sectors: healthcare, education, hospitality)
- What: Robots that maintain expressive, stylized motion under autonomy (not just teleoperation), useful for pediatric therapy, classroom engagement, or concierge roles.
- Tools/products/workflows: Onboard planning layered over stylized RL controllers; perception-driven gaze and gesture; safety envelopes.
- Dependencies/assumptions: Robust perception in crowds; long-duration thermal and power management; regulatory approvals for human interaction.
- Standardized thermal-aware control embedded in actuator firmware (Sectors: robotics components, industrial automation)
- What: Vendor-level support for temperature-state estimation and CBF-like constraints baked into low-level drivers.
- Tools/products/workflows: Actuator SDKs exposing temperature dynamics and constraint hooks; diagnostics for derating torque.
- Dependencies/assumptions: Cross-vendor interfaces; performance guarantees; co-design with mechanical cooling strategies.
- Noise-compliant legged delivery/logistics robots for urban settings (Sectors: logistics, smart cities)
- What: Widespread adoption of contact-sound minimization for sidewalk/nighttime operations under stricter noise ordinances.
- Tools/products/workflows: Route planning with acoustic constraints; compliance reporting; foot/shoe materials co-designed with control.
- Dependencies/assumptions: Policy changes on urban noise; durability of low-noise feet; energy trade-offs vs. speed.
- High-fidelity simulation of clothing/skins and thermal dynamics (Sectors: simulation software, robotics R&D)
- What: Coupled simulators that capture fabric/foam interactions and multi-body heat transfer for long-horizon training.
- Tools/products/workflows: FEM/cloth engines coupled to rigid-body physics; learned surrogates; improved domain randomization strategies.
- Dependencies/assumptions: Computational efficiency; validated material models; robust parameter identification.
- Modular compact shoulder/face linkage kits for humanoids and animatronics (Sectors: robotics hardware, OEM modules)
- What: Off-the-shelf, low-profile spherical 5-bar shoulder and facial-mechanism kits for compact platforms and character robots.
- Tools/products/workflows: Standardized mounting patterns; integrated encoders; calibration utilities.
- Dependencies/assumptions: Market size to justify tooling; interoperability with varied actuators; maintainability.
- Multi-robot, networked live shows and immersive experiences (Sectors: entertainment, LBE venues)
- What: Coordinated casts of expressive robots synced to music, lighting, and audience interaction.
- Tools/products/workflows: Real-time show control protocols; multi-agent policy orchestration; safety interlocks for crowd proximity.
- Dependencies/assumptions: Robust wireless and orchestration; venue-specific safety certification; fallback behaviors for failures.
- Home service robots with child-friendly, character-like embodiments (Sectors: consumer robotics)
- What: Household assistants with soft exteriors, expressive motion, and quiet gait to improve acceptance and safety.
- Tools/products/workflows: On-device stylized policy libraries; parent controls; privacy-by-design sensing.
- Dependencies/assumptions: Cost reduction in actuation and compute; reliable autonomy indoors; long-term maintenance model.
- Wearables and exoskeletons with comfort-preserving, thermal-aware control (Sectors: medical devices, industrial exosuits)
- What: Controllers that actively limit actuator heat and surface temperature near the body, maintaining comfort/safety under prolonged use.
- Tools/products/workflows: Embedded thermal modeling and derating; human-in-the-loop comfort metrics.
- Dependencies/assumptions: Regulatory certification for medical/industrial use; accurate thermal sensing; mechanical heat pathways.
- Standards and certification frameworks for mobile animatronics in public spaces (Sectors: policy, standards bodies)
- What: Guidance covering acoustic emissions, detaching appendages, soft-bodied impact compliance, and thermal exposure.
- Tools/products/workflows: Test suites and pass/fail thresholds inspired by the paper’s methods and measurements.
- Dependencies/assumptions: Cross-industry collaboration; incident reporting data; harmonization with existing robot safety standards.
Glossary
- 4-bar linkage: A four-link mechanism used to transmit and transform motion between components. "upper jaw is coupled to this through a 4-bar linkage."
- 5-bar linkage: A five-link mechanism; in spherical form it enables controlled rotation about intersecting axes. "drive the shoulder through a spherical 5-bar linkage."
- 6-DoF: Six degrees of freedom; motion in 3D translation and 3D rotation. "novel asymmetric six-degrees-of-freedom (6-DoF) leg mechanism"
- Anthropomorphic: Human-like in form or behavior, often used to describe robot morphology. "anthropomorphic~\cite{sakagami2002intelligent, oh2006design, gouaillier2009mechatronic, liao2025berkeley, lohmeier2009humanoid}"
- Articulated backbone: The central, actuated structure of the robot's body that drives primary motion. "For this reason, they are separated from the main articulated backbone and controlled using classical methods."
- Control Barrier Function (CBF): A control-theoretic construct that enforces safety constraints by shaping the system’s state derivatives. "Control Barrier Function (CBF, \cite{ames2019control}) condition~\eqref{eq:temp_cbf}."
- Domain-randomized disturbance forces: Randomized perturbations used during training to improve robustness across variations. "Interaction forces between the costume and the legs were addressed solely through domain-randomized disturbance forces."
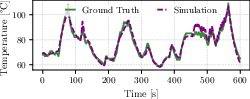
- Explicit Euler discretization: A forward numerical integration method for discretizing continuous-time dynamics. "a least-squares regression applied to an explicit Euler discretization of the thermal dynamics"
- Feedforward term: A precomputed control input added to compensate predictable effects, improving tracking. "To compensate for these effects, we add a feedforward term $\tau^{\text{jaw}_{\text{ff}(q^{\text{jaw})$ to the PD controller."
- First-order hold: Linear interpolation between discrete samples to reconstruct a continuous control signal. "using a first-order hold (i.e., linear interpolation between successive actions)."
- Forward-kinematics solver: An algorithm that computes end-effector pose from joint coordinates. "This mapping is derived using a forward-kinematics solver~\cite{schumacher2021versatile}"
- Gait phase variable: A scalar representing progress through a periodic step cycle. "For walking, additionally includes the gait phase variable ."
- Imitation learning: Learning to reproduce reference motions or expert behavior. "imitation learning~\cite{peng2018deepmimic, peng2020learning, serifi2024vmp, he2025asap}"
- Impact reduction reward: A reward term that penalizes hard foot impacts to reduce noise. "Impact reduction reward: a reward that substantially reduces footstep noise, helping preserve the characterâs believability."
- Isaac Sim: NVIDIA’s robotics simulation platform for training and testing. "Training is performed in Isaac Sim~\cite{NVIDIA_Isaac_Sim}"
- Joule heating: Heat generated by electrical current in resistive elements, scaling with the square of current/torque. "electrical Joule heating , which scales with since torque and ."
- Kinematic reference motion: A desired motion specified by positions/velocities without dynamic constraints. "incentivizes accurate imitation of the kinematic reference motion."
- Low-pass filter: A filter that attenuates high-frequency components to smooth signals. "passed through a low-pass filter with a cut-off of \SI{37.5}{\hertz} to ensure smooth motor commands."
- Mechatronic design: Integrated design combining mechanical, electronic, and control systems. "Mechatronic design: a compact, scale-accurate design of Olaf, featuring a novel asymmetric six-degrees-of-freedom (6-DoF) leg mechanism..."
- Path frame: A moving coordinate frame attached to the commanded path for pose-invariant control. "We use the path frame concept introduced in~\cite{grandia2024bdx}."
- Planar linkages: Mechanical linkages constrained to planar motion. "spherical, planar, and spatial linkages"
- Proportional-Derivative (PD) controller: A feedback controller using proportional and derivative terms on error. "Actions are position targets for Proportional-Derivative (PD) controllers at the joints."
- Proprioceptive state: Internal sensing of the robot’s own pose, joint states, and related signals. "The robot's proprioceptive state is"
- Proximal Policy Optimization (PPO): A reinforcement learning algorithm that stabilizes training via clipped updates. "We train the policies using Proximal Policy Optimization (PPO)~\cite{schulman2017proximal}."
- Remote actuation: Locating actuators away from joints and transmitting motion via linkages. "or implement remote actuation through linkages~\cite{hutter2012starleth, reher2019dynamic, wensing2017proprioceptive}."
- Saccades: Rapid eye movements that shift gaze. "plays looped whole-body animations to introduce subtle idle behaviors such as eye saccades and arm adjustments."
- Saturation: Capping a term’s magnitude to avoid instability or excessive influence. "we saturate the impact-reduction reward term in the reward computation."
- SO(3) log-map: A mapping that expresses orientation differences in the Lie algebra of 3D rotations. " is the log-map orientation difference"
- Spatial linkages: Linkages enabling motion in three-dimensional space. "spherical, planar, and spatial linkages"
- State estimator: An algorithm that fuses sensors to estimate the system’s state. "The proprioceptive state is estimated using a state estimator that fuses IMU and actuator measurements~\cite{hartley2020contact}."
- Thermal model: A mathematical model of temperature dynamics in actuators. "Validation of the thermal model in~\eqref{eq:temp_model}"
- Thermal reward: A reward that penalizes temperature violations to prevent overheating. "To evaluate the effectiveness of the proposed thermal reward, we compare the temperature evolution of the neck-pitch actuator..."
- Unit quaternion: A normalized quaternion used to represent 3D orientation. "where and are the torso position and orientation (unit quaternion)"
- Upsampling: Increasing the effective sampling rate by interpolating signals. "its output is upsampled to the \SI{600}{\hertz} actuator rate"
- Zoomorphic: Animal-like in form or behavior, used for robot morphology. "zoomorphic~\cite{seok2014design, hutter2016anymal, reher2019dynamic}"
Collections
Sign up for free to add this paper to one or more collections.