- The paper introduces a one-step MPPI approach using Configuration Space Distance Fields to overcome vanishing-gradient and local minima issues.
- It employs an angle-based cost function that projects motion in obstacle avoidance directions, significantly reducing computation time with control frequencies above 750 Hz.
- Experimental results show near-perfect success rates and superior performance compared to traditional methods, especially in high-dimensional robotic setups.
Overview of "One-Step Model Predictive Path Integral for Manipulator Motion Planning Using Configuration Space Distance Fields"
Introduction and Background
Robotic manipulator motion planning is a critical domain in robotics, focusing on efficient collision-free motion generation in dynamic environments. Traditional approaches, primarily optimization-based, use Signed Distance Fields (SDF) to navigate obstacles. However, these methods are often constrained by vanishing gradients and local minima issues, compromising reliability and efficiency. The paper introduces Configuration Space Distance Fields (CDF) as a versatile tool to overcome these limitations. CDFs offer differentiable and robust gradient information in the robot's configuration space, facilitating more accurate collision avoidance. In parallel, sampling-based strategies like Model Predictive Path Integral (MPPI) control offer gradient-free alternatives but often at high computational costs due to complex sampling requirements. This work integrates CDF with MPPI to enhance the computational efficiency of robotic motion planning without compromising collision avoidance efficacy.
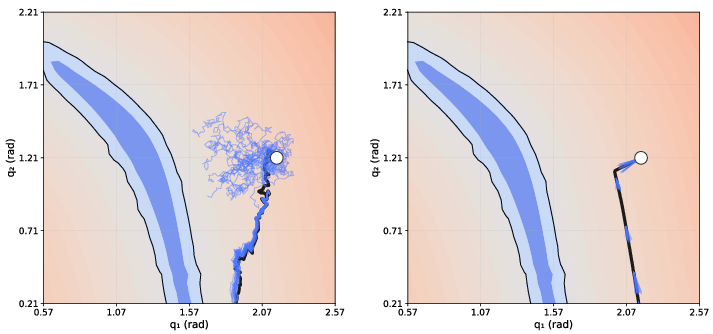
Figure 1: Comparison between the original MPPI and our proposed method in the two-link robot configuration space.
Recent advancements have highlighted GPU acceleration for SDF computations to improve dynamic scene handling, yet these techniques remain hardware-intensive. CDF offers a differentiated approach, being more reliable due to its well-distributed gradients but traditionally coupled with optimization frameworks prone to local optima. The presented integration of CDF with MPPI leverages CDF’s gradient richness to collapse the planning horizon to a single step, drastically reducing computational requirements while sustaining nearly perfect success rates in complex environments.
Methodology
The proposed framework employs a novel CDF-MPPI integration aimed at controlling high-DOF robotic manipulators efficiently. The approach reforms the MPPI cost function using angles between motion vectors and obstacle normals, inherently unifying and simplifying cost expressions and reducing computational complexity through one-step horizon sampling. CDF gradients are directly utilized to project motion in avoidance directions during each sampling step.
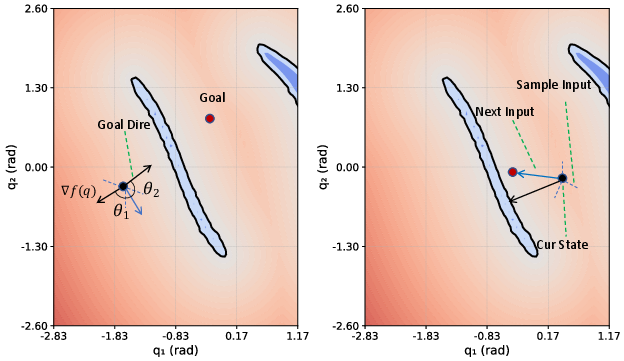
Figure 2: Two-link robot in the configuration space demonstrating angle-based cost function and obstacle avoidance strategy.
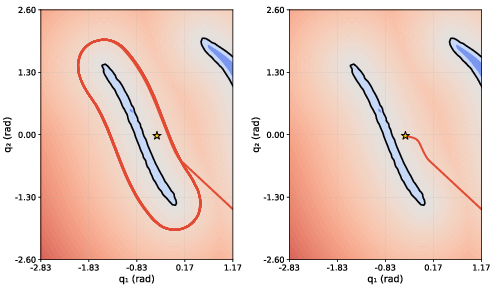
Figure 3: Illustrating the efficiency of angle-based collision cost adjustments in motion trajectory planning around obstacles.
The methodology avoids intricate optimization loops, resolving the vanishing-gradient problems associated with traditional SDF, and integrates angular navigation metrics into MPPI, offering streamlined computations and notably rapid control frequencies (exceeding 750 Hz compared to baselines). The proposed approach excelled particularly in high-dimensional settings, such as the 7-DOF Franka manipulator testing scenarios which involved navigating substantial obstacle arrays efficiently.
Evaluation and Results
The authors conducted extensive experimentation on varied robotic setups, emphasizing the robustness of the CDF-MPPI framework in challenging simulations. The method outperformed conventional optimization-based baselines such as QP and standard MPPI across multiple metrics, including success rate, path length, and execution speed.
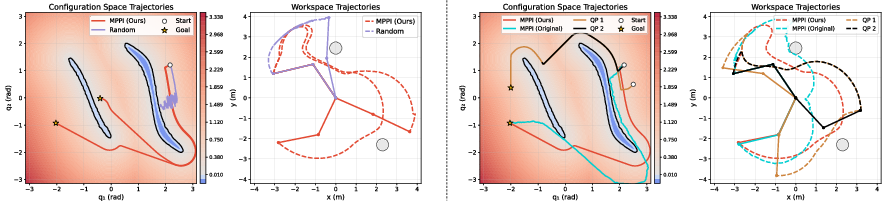
Figure 4: Comparison of methodologies depicting effectiveness in varying start-goal configurations and environments.
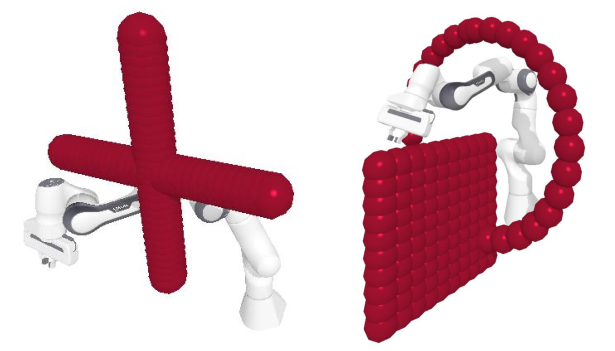
Figure 5: Scenario overview for obstacle-laden motion planning trials with the Franka robot under fixed and random start-goal conditions.
Success rates consistently neared 100%, with reducer computation time attributed to the one-step sampling innovation. The results assert that the one-step approach is adept at navigating highly non-convex spaces and evading local minima issues prevalent in optimization-centric methods.
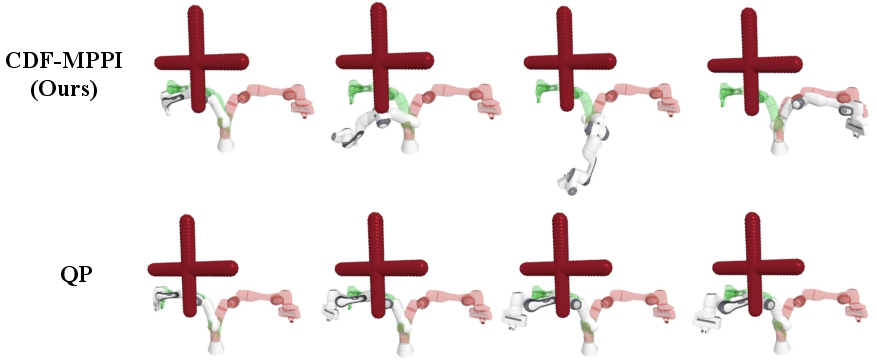
Figure 6: Performance juxtaposition in a high-obstacle density framework reveals the superior obstacle navigation and goal convergence of MPPI (ours).
Conclusion
The integration of CDF with MPPI presents a substantive advancement in robotic motion planning, efficiently marrying gradient-rich navigation control with the computational efficiency imperatives of modern robotic systems. This framework not only enhances collision avoidance but also simplifies cost function dynamics, setting a benchmark in computational speed and reliability.
Future developments aspire towards enhancing the safety robustness of CDF integration, and algorithmic efficiencies in obstacle-heavy environments, aimed at improving initialization protocols and handling high-dimensional configuration space bottlenecks. Continued exploration into CDF representations beyond point-based models, incorporating spatial region sampling, can yield significant advancements in collision prediction and avoidance strategies.